Clear Sky Science · it
Modellizzazione cinematico-aerodinamica di ali flessibili con regolazione alla radice per veicoli micro aerei a battito
Perché i micro-robot che battono le ali sono importanti
Immaginate un robot volante grande quanto il palmo della mano che può librarsi come un colibrì, insinuarsi tra le macerie dopo un terremoto o ispezionare l’interno di una macchina dove i droni più grandi non riescono ad arrivare. Per rendere pratici questi veicoli micro aerei ispirati agli insetti, gli ingegneri devono comprendere come le loro ali sottilissime si flettono, si torcono e spingono contro l’aria. Questo articolo affronta un tassello chiave mancante: come prevedere le forze e i momenti torcenti prodotti quando le radici di ali flessibili vengono attivamente twistate per governare un robot senza coda che si libra.

Come gli robot simili a insetti sterzano senza coda
Molti piccoli robot battenti imitano gli insetti usando due ali e senza coda. Farli sterzare è sorprendentemente difficile. Battere le ali più velocemente o più energicamente può cambiare direzione, ma ciò lega insieme la spinta verticale e la virata, rendendo il controllo goffo. Il progetto qui esplorato usa un approccio più elegante: le stesse radici delle ali possono torcersi. Torcendo entrambe le radici nello stesso verso, il robot imbardata avanti o indietro (pitch); torcendole insieme lateralmente, si rolla; torcendole in versi opposti, si imbardata (yaw). Tutto ciò dipende da come la superficie dell’ala flessibile si deforma in risposta a quella torsione, modificando l’angolo con cui le diverse parti dell’ala incontrano l’aria in arrivo.
Scomporre il moto dell’ala in blocchi semplici
Gli autori costruiscono innanzitutto una descrizione matematica dettagliata di come si muovono le ali. Invece di trattare l’ala come una lamina rigida, riconoscono che l’asta dell’ala e le sue vene principali non battono perfettamente in sincronia. C’è piuttosto un piccolo ritardo di fase, chiamato angolo di fase di rilassamento, che cattura come la membrana rimanga indietro rispetto alla struttura che la guida. Il team rappresenta il moto battente come la combinazione di una percorrenza rettilinea (a profilo triangolare) e di una curva sinusoidale più morbida, che insieme mimano le traiettorie reali registrate dalle telecamere ad alta velocità. Relazionano poi le differenze di fase tra asta e vene a quanto la radice dell’ala viene torcisa, sia per i comandi di beccheggio (pitch) sia per quelli di rollio, così il modello può prevedere la forma tridimensionale e il timing di un’ala flessibile in ogni parte del battito d’ala.
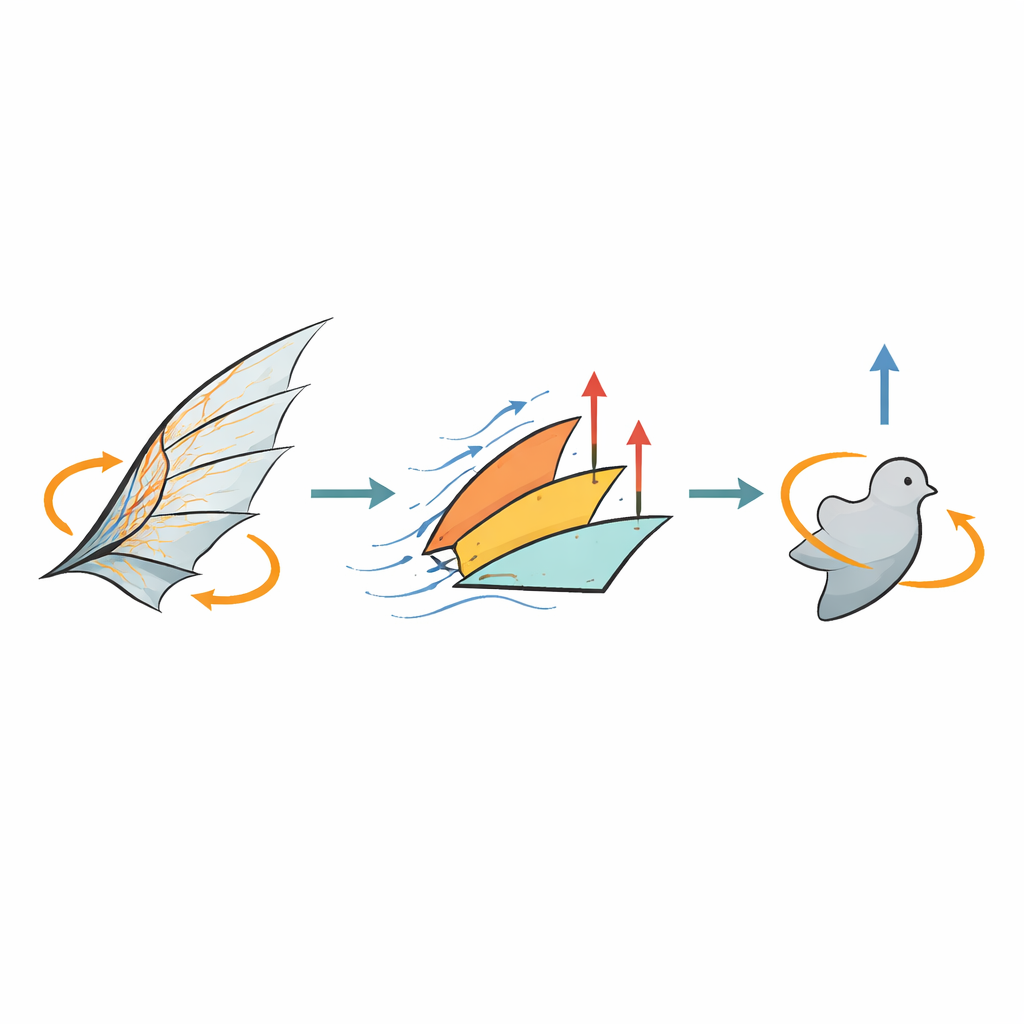
Trasformare ali che si piegano in pezzi gestibili di flusso d’aria
Modellare l’aria intorno a un’ala completamente flessibile nei dettagli richiederebbe normalmente simulazioni fluidodinamiche intensive, troppo lente per studi di progetto o controllo a bordo. Per evitarlo, gli autori introducono un’escamotage intelligente. Suddividono la superficie deformante dell’ala in un piccolo numero di pannelli planari rigidi basati sulla rete naturale delle vene: tre pannelli principali che si inclinano e si spazzano durante il battito. Per ciascun pannello usano l’approccio standard del “blade element”, calcolando portanza e resistenza generate da molte strisce elementari lungo l’apertura alare, tenendo conto sia del moto di spazzata sia della rotazione dell’ala. Sommando i contributi di tutti i pannelli si ottiene una stima della forza totale e del momento torcente che agisce sul robot, con un costo computazionale molto inferiore rispetto a simulazioni complete accoppiate fluido-struttura.
Dalle equazioni a forze e momenti in laboratorio
Per testare il loro quadro teorico, i ricercatori hanno costruito un prototipo di robot a ali battenti con ali azionate da corde e radici d’ala regolabili. Usando telecamere ad alta velocità e un sensore di forza a sei assi, hanno misurato forme reali delle ali, ampiezze di battito, portanza e momenti di controllo su una gamma di frequenze e torsioni delle radici. Le stesse condizioni sono state poi inserite in due modelli: una tradizionale approssimazione a singolo piano e il nuovo metodo multi-pannello. Mentre il modello semplice tendeva a sovrastimare la portanza — perché usava un unico angolo d’attacco fisso per tutta l’ala — il metodo multi-pannello, con i suoi angoli d’attacco variabili per pannello, ha corrisposto agli esperimenti in modo molto più accurato. In un intervallo pratico di frequenze di battito, le sue previsioni di portanza sono rimaste a circa il 20 percento dei valori misurati, e ha catturato con precisione come i comandi di pitch e roll riducano leggermente la portanza mentre producono momenti di controllo che crescono quasi perfettamente in modo lineare con l’intensità del comando.
Cosa significa questo per i futuri piccoli volatori
Per i non specialisti, il punto chiave è che gli autori hanno fornito un modo rapido e ragionevolmente accurato per prevedere come le ali flessibili rispondono quando si torcono le loro radici per sterzare un piccolo robot volante. Combinando una descrizione realistica ma compatta del moto dell’ala con un modello del flusso basato su pannelli, dimostrano che i progettisti possono stimare portanza, resistenza e momenti di controllo senza simulazioni costose o prove ed errori interminabili. Questo offre agli ingegneri un kit di strumenti pratico per tarare la geometria delle ali, la frequenza di battito e le strategie di controllo, così che i veicoli micro aerei ispirati agli insetti possano librarsi stabilmente e rispondere con prontezza ai comandi di sterzata, avvicinando i robot agili delle dimensioni di un insetto a un uso quotidiano.
Citazione: Liu, Z., Zhang, X., Wang, Z. et al. Kinematic and aerodynamic modeling of flexible wings with wing root adjustment for flapping wing micro aerial vehicles. Sci Rep 16, 9827 (2026). https://doi.org/10.1038/s41598-026-40582-8
Parole chiave: veicolo micro aereo a battito, ali flessibili, controllo della radice dell’ala, modellizzazione aerodinamica, robotica bioispirata