Clear Sky Science · fr
Modélisation cinématique et aérodynamique d'ailes flexibles avec réglage à la racine pour les micro‑drones à ailes battantes
Pourquoi les petits robots battants comptent
Imaginez un robot volant de la taille d’une paume qui peut stationner comme un colibri, se faufiler dans les décombres après un tremblement de terre ou inspecter l’intérieur d’un moteur là où les drones plus gros ne peuvent pas accéder. Pour rendre ces micro‑véhicules inspirés des insectes réellement utiles, les ingénieurs doivent comprendre comment leurs ailes, aussi fines que du papier, fléchissent, se tordent et repoussent l’air. Cet article aborde un élément clé manquant : comment prédire les forces et les moments de basculement produits lorsque les racines d’ailes flexibles sont activement tordues pour diriger un robot stationnaire sans queue.

Comment les robots insectoïdes dirigent sans queue
Beaucoup de petits robots battants imitent les insectes en n’ayant que deux ailes et pas de queue. Les diriger est étonnamment difficile. Simplement battre plus vite ou plus fort peut changer de direction, mais cela couple la force verticale et la rotation, rendant le contrôle maladroit. La conception étudiée ici utilise une méthode plus élégante : les racines des ailes peuvent se tordre. En tordant les deux racines dans le même sens, le robot s’incline vers l’avant ou l’arrière ; en les tordant ensemble latéralement, il effectue un roulis ; en les tordant en sens opposé, il effectue un lacet. Tout dépend de la façon dont la surface flexible de l’aile se déforme en réponse à cette torsion, modifiant l’angle d’attaque local des différentes parties de l’aile face à l’air entrant.
Décomposer le mouvement de l’aile en briques simples
Les auteurs construisent d’abord une description mathématique détaillée du mouvement des ailes. Plutôt que de traiter l’aile comme une plaque rigide, ils reconnaissent que la nervure principale et ses veines ne battent pas parfaitement en phase. Il existe au contraire un petit décalage de phase, appelé angle de phase de relaxation, qui traduit le retard de la membrane par rapport à la structure motrice. L’équipe représente le mouvement de battement comme la combinaison d’un balayage rectiligne (en forme de triangle) et d’une courbe sinusoïdale lisse, qui ensemble imitent les trajectoires réelles enregistrées par caméras haute vitesse. Ils relient ensuite les différences de phase entre la nervure et les veines à l’amplitude de torsion à la racine, pour les commandes de tangage et de roulis, de sorte que le modèle puisse prédire la forme tridimensionnelle et le calendrier d’une aile flexible à chaque instant du battement.
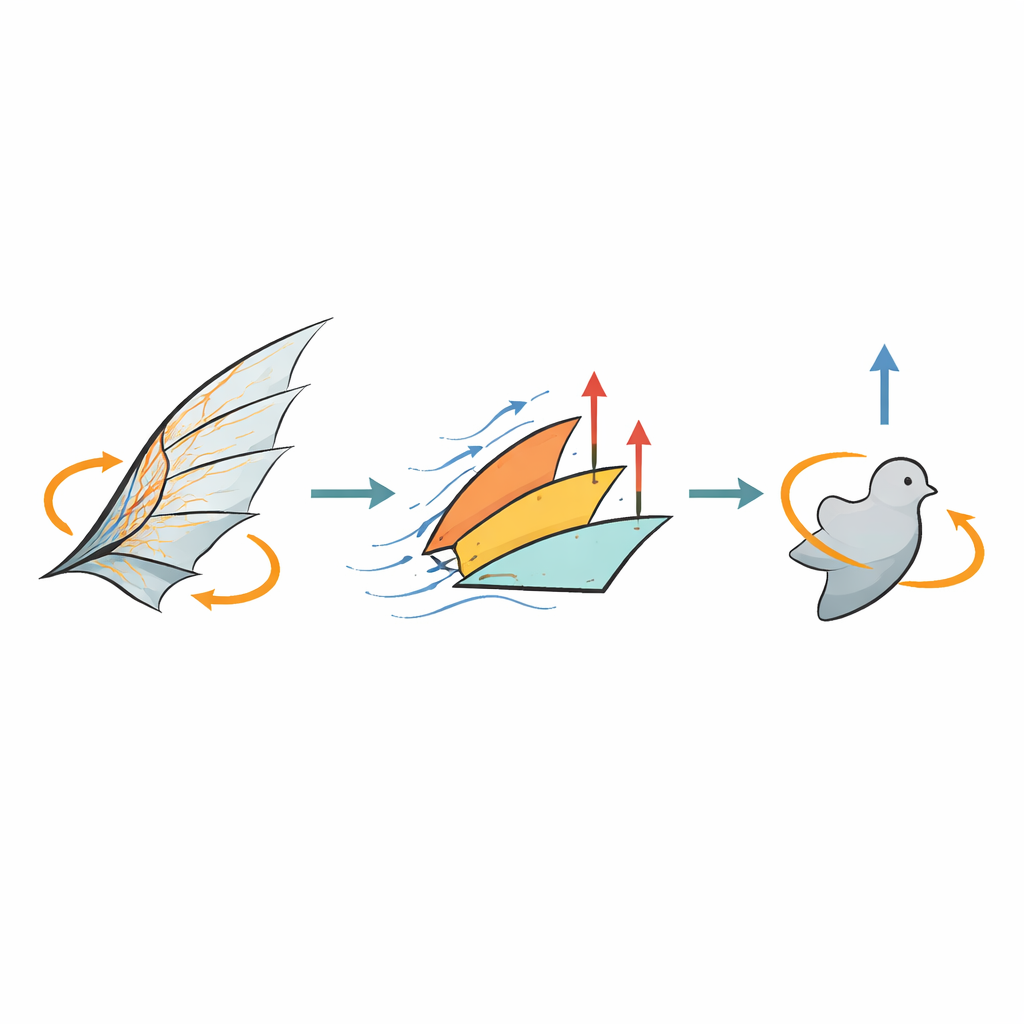
Transformer des ailes flexibles en éléments gérables pour l’écoulement
Modéliser l’air autour d’une aile entièrement flexible en détail demanderait normalement des simulations fluide‑structure lourdes, bien trop lentes pour des études de conception ou du contrôle embarqué. Pour l’éviter, les auteurs introduisent une astuce ingénieuse. Ils découpent la surface déformante de l’aile en un petit nombre de panneaux plans rigides basés sur le réseau naturel de veines : trois panneaux principaux qui s’inclinent et balaient pendant le battement. Pour chaque panneau, ils utilisent une approche standard de « blade element », calculant la portance et la traînée produites par de nombreuses petites lanières le long de l’envergure, tout en tenant compte à la fois du mouvement de balayage et de la rotation de l’aile. L’addition des contributions de tous les panneaux fournit une estimation de la force totale et du moment de torsion agissant sur le robot, avec beaucoup moins de calcul que des simulations complètes fluide‑structure.
Des équations aux forces et moments en laboratoire
Pour tester leur cadre, les chercheurs ont construit un prototype de robot à ailes battantes avec des ailes entraînées par corde et des racines d’aile ajustables. À l’aide de caméras haute vitesse et d’un capteur de forces six axes, ils ont mesuré les formes réelles des ailes, les amplitudes de battement, la portance et les moments de contrôle sur une plage de fréquences et de torsions de racine. Les mêmes conditions ont ensuite été soumises à deux modèles : une approximation traditionnelle à plan unique et la nouvelle méthode multipanneau. Alors que le modèle simple avait tendance à surestimer la portance — parce qu’il utilisait un angle d’attaque fixe pour toute l’aile —, la méthode multipanneau, avec ses angles d’attaque panelisés, correspondait beaucoup mieux aux expériences. Sur une plage pratique de fréquences de battement, ses prédictions de portance restaient à environ 20 % des valeurs mesurées, et elle capturait précisément comment les commandes de tangage et de roulis réduisent légèrement la portance tout en produisant des moments de contrôle qui croissent presque parfaitement linéairement avec l’intensité de la commande.
Ce que cela signifie pour les futurs petits volants
Pour les non‑spécialistes, la conclusion clé est que les auteurs ont fourni une méthode rapide et raisonnablement précise pour prédire comment des ailes flexibles réagissent quand on tord leurs racines pour diriger un petit robot volant. En combinant une description réaliste mais compacte du mouvement des ailes avec un modèle d’écoulement basé sur des panneaux, ils montrent que les concepteurs peuvent estimer la portance, la traînée et les moments de contrôle sans simulations coûteuses ni essais‑erreurs interminables. Cela offre aux ingénieurs une boîte à outils pratique pour ajuster la géométrie des ailes, la fréquence de battement et les stratégies de commande afin que les micro‑véhicules insectoïdes puissent stationner de manière stable et répondre avec précision aux commandes de direction, rapprochant ainsi des robots agiles de la taille d’un insecte d’une utilisation quotidienne.
Citation: Liu, Z., Zhang, X., Wang, Z. et al. Kinematic and aerodynamic modeling of flexible wings with wing root adjustment for flapping wing micro aerial vehicles. Sci Rep 16, 9827 (2026). https://doi.org/10.1038/s41598-026-40582-8
Mots-clés: micro‑véhicule aérien à ailes battantes, ailes flexibles, contrôle à la racine de l'aile, modélisation aérodynamique, robotique bioinspirée