Clear Sky Science · pt
Modelagem cinemática e aerodinâmica de asas flexíveis com ajuste na raiz da asa para veículos micro aéreos batendo asas
Por que robôs batendo asas em miniatura importam
Imagine um robô voador do tamanho da palma da mão que pode pairar como um beija-flor, deslizar por entre escombros após um terremoto ou inspecionar o interior de uma máquina onde drones maiores não conseguem entrar. Para tornar esses veículos micro aéreos inspirados em insetos práticos, os engenheiros precisam entender como suas asas finas como papel flexionam, torcem e empurram o ar. Este artigo aborda uma peça-chave que faltava: como prever as forças e os momentos de guinada produzidos quando as raízes de asas flexíveis são ativamente torcidas para manobrar um robô sem cauda que paira.

Como robôs parecidos com insetos fazem curva sem cauda
Muitos pequenos robôs batendo asas copiam insetos usando duas asas e sem cauda. Guiá-los é surpreendentemente difícil. Apenas bater as asas mais rápido ou com mais força pode mudar a direção, mas isso acopla a força vertical com a guinada, tornando o controle desajeitado. O projeto explorado aqui usa uma abordagem mais elegante: as próprias raízes das asas podem torcer. Ao torcer ambas as raízes no mesmo sentido, o robô inclina-se para frente ou para trás (pitch); ao torcê‑las lateralmente no mesmo sentido, ele rola; e ao torcê‑las em sentidos opostos, ele faz yaw. Tudo isso depende de como a superfície flexível da asa se deforma em resposta à torção, alterando o ângulo com que diferentes partes da asa encontram o ar em avanço.
Dividindo o movimento da asa em blocos construtivos simples
Os autores primeiro constroem uma descrição matemática detalhada de como as asas se movem. Em vez de tratar a asa como uma placa rígida, eles reconhecem que o longo bordo estrutural (spar) e suas nervuras principais não batem perfeitamente sincronizados. Em vez disso, há um pequeno atraso de fase, chamado ângulo de fase de relaxação, que captura como a membrana fica para trás em relação à estrutura motora. A equipe representa o movimento de batida como uma combinação de varredura retilínea (triangular) e uma curva senoidal suave, que juntas imitam trajetórias reais registradas por câmeras de alta velocidade. Eles então relacionam as diferenças de fase entre spar e nervuras a quanto a raiz da asa é torcida, tanto para comandos de pitch quanto de roll, para que o modelo possa prever a forma tridimensional e o tempo de uma asa flexível durante cada parte de um batimento.
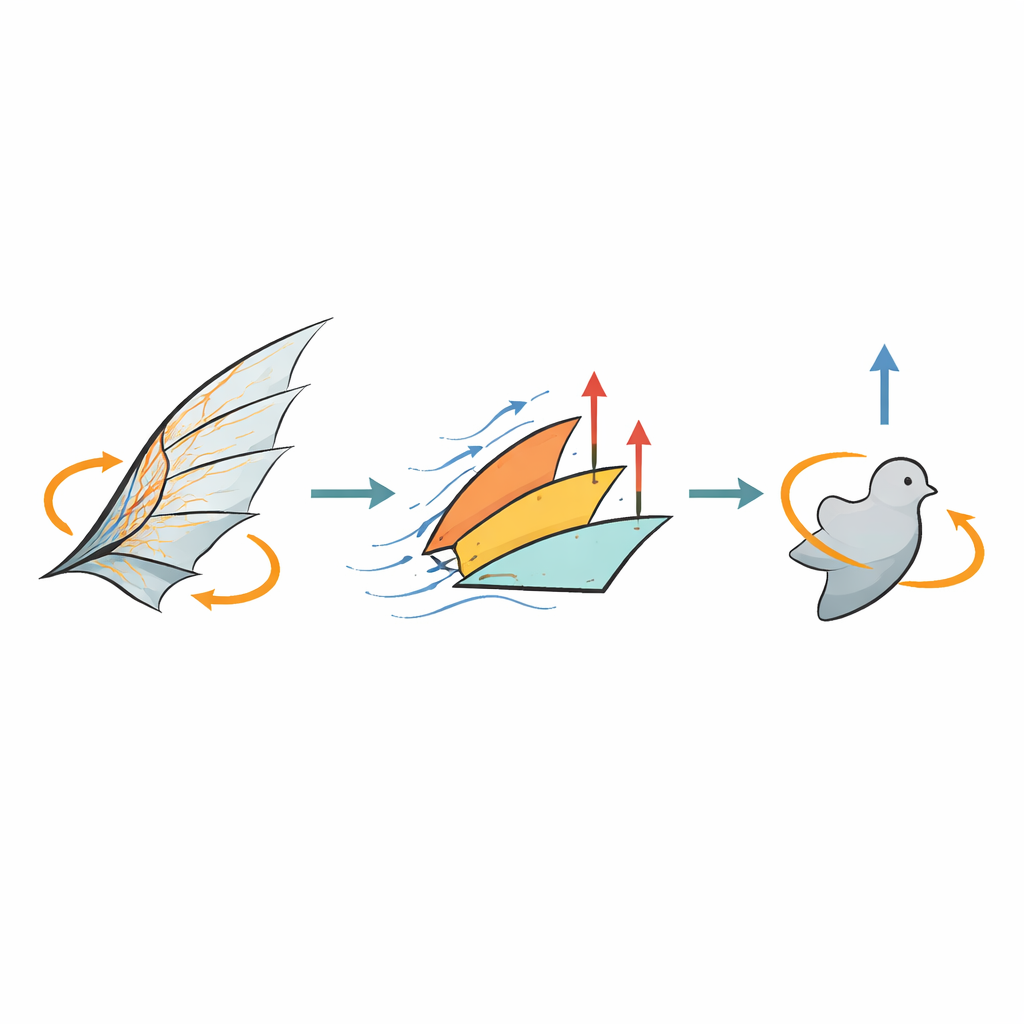
Transformando asas dobráveis em pedaços manejáveis de fluxo de ar
Modelar o ar ao redor de uma asa totalmente flexível em detalhes finos normalmente exigiria simulação fluido‑estrutura pesada, muito lenta para estudos de projeto ou controle embarcado. Para evitar isso, os autores introduzem um atalho inteligente. Eles fatiam a superfície deformante da asa em um pequeno número de painéis planos rígidos baseados na rede natural de nervuras: três painéis principais que inclinam e varrem durante a batida. Para cada painel, usam uma abordagem padrão de “elemento de pá”, calculando a sustentação e o arrasto produzidos por muitas tiras minúsculas ao longo do envergamento, enquanto levam em conta tanto o movimento de varredura quanto a rotação da asa. Somando as contribuições de todos os painéis obtém‑se uma estimativa da força total e do momento de torção atuando no robô, com muito menos cálculo do que em simulações completas fluido‑estrutura.
Das equações às forças e momentos no laboratório
Para testar seu arcabouço, os pesquisadores construíram um protótipo de robô com asas batentes acionadas por cordas e raízes de asa ajustáveis. Usando câmeras de alta velocidade e um sensor de forças de seis eixos, mediram formas reais das asas, amplitudes de batida, sustentação e momentos de controle em uma faixa de frequências e torções de raiz. As mesmas condições foram então alimentadas em dois modelos: uma aproximação tradicional de plano único e o novo método multi‑painel. Enquanto o modelo simples tendia a superestimar a sustentação — porque usava um único ângulo de ataque fixo para toda a asa —, o método multi‑painel, com seus ângulos de ataque por painel, concordou muito melhor com os experimentos. Em uma faixa prática de frequências de batida, suas previsões de sustentação permaneceram dentro de cerca de 20% dos valores medidos, e ele capturou com precisão como comandos de pitch e roll reduzem ligeiramente a sustentação enquanto produzem momentos de controle que crescem quase linearmente com a intensidade do comando.
O que isso significa para futuros voadores minúsculos
Para não‑especialistas, a principal conclusão é que os autores forneceram um modo rápido e razoavelmente preciso de prever como asas flexíveis respondem quando você torce suas raízes para controlar um robô voador minúsculo. Ao combinar uma descrição realista porém compacta do movimento da asa com um modelo de fluxo baseado em painéis, eles mostram que projetistas podem estimar sustentação, arrasto e momentos de controle sem simulações caras ou tentativas e erros intermináveis. Isso dá aos engenheiros um conjunto de ferramentas prático para ajustar geometria da asa, frequência de batida e estratégias de controle, de modo que veículos micro aéreos inspirados em insetos possam pairar com estabilidade e responder com precisão a comandos de direção, aproximando robôs ágeis do tamanho de insetos de um uso cotidiano.
Citação: Liu, Z., Zhang, X., Wang, Z. et al. Kinematic and aerodynamic modeling of flexible wings with wing root adjustment for flapping wing micro aerial vehicles. Sci Rep 16, 9827 (2026). https://doi.org/10.1038/s41598-026-40582-8
Palavras-chave: veículo micro aéreo de asas batentes, asas flexíveis, controle na raiz da asa, modelagem aerodinâmica, robótica bioinspirada