Clear Sky Science · es
Modelado cinemático y aerodinámico de alas flexibles con ajuste en la raíz para vehículos microaéreos de aleteo
Por qué importan los pequeños robots que baten las alas
Imagine un robot volador del tamaño de una palma capaz de colgarse en el aire como un colibrí, deslizarse entre escombros tras un terremoto o inspeccionar el interior de una máquina donde drones más grandes no caben. Para que esos vehículos microaéreos inspirados en insectos sean prácticos, los ingenieros deben comprender cómo sus alas de papel se doblan, torsionan y empujan contra el aire. Este artículo aborda una pieza clave que faltaba: cómo predecir las fuerzas y los momentos de vuelco generados cuando las raíces de alas flexibles se tuercen activamente para gobernar un robot sin cola que mantiene el vuelo estacionario.

Cómo maniobran los robots similares a insectos sin cola
Muchos pequeños robots de aleteo imitan a los insectos usando dos alas y sin cola. Maniobrarlos resulta sorprendentemente difícil. Aletear más rápido o con mayor amplitud puede cambiar la dirección, pero eso acopla la fuerza vertical con el giro, dificultando el control. El diseño explorado aquí usa un enfoque más elegante: las propias raíces de las alas pueden torcerse. Si se tuercen ambas raíces en la misma dirección, el robot cabecea hacia delante o hacia atrás; si se tuercen juntas lateralmente, vira en balanceo; si se tuercen en direcciones opuestas, generan guiñada. Todo esto depende de cómo se deforma la superficie flexible del ala en respuesta a esa torsión, alterando el ángulo con que distintas partes del ala encuentran el flujo de aire entrante.
Descomponer el movimiento del ala en elementos simples
Los autores primero construyen una descripción matemática detallada de cómo se mueven las alas. En lugar de tratar el ala como una placa rígida, reconocen que el peine de sustentación (spar) y sus venas principales no baten en perfecta sincronía. En su lugar existe un pequeño desfase, llamado ángulo de fase de relajación, que captura cómo la membrana queda rezagada respecto a la estructura motriz. El equipo representa el movimiento de aleteo como la combinación de una barrida rectilínea (triangular) y una curva sinusoidal suave, que juntas imitan las trayectorias reales registradas por cámaras de alta velocidad. Luego relacionan las diferencias de fase entre peine y venas con cuánto se tuerce la raíz del ala, tanto para comandos de cabeceo como de balanceo, de modo que el modelo puede predecir la forma tridimensional y el momento de cada porción del ala durante todo el ciclo de aleteo.
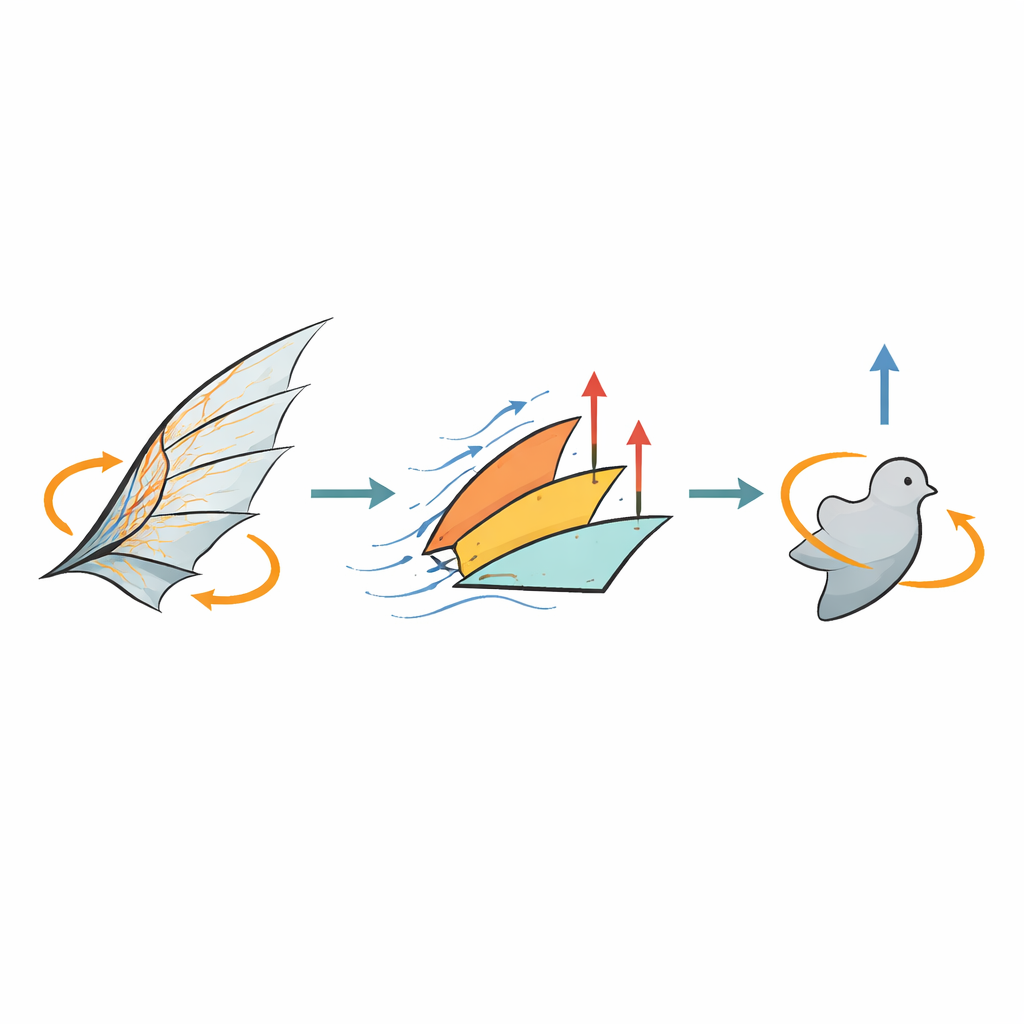
Convertir alas flexionadas en porciones manejables de flujo de aire
Modelar el aire alrededor de un ala totalmente flexible con todo detalle normalmente requeriría simulaciones de fluidos de gran coste computacional, demasiado lentas para estudios de diseño o control embarcado. Para evitar eso, los autores introducen un atajo ingenioso. Cortan la superficie deformable del ala en un pequeño número de parches planos rígidos basados en la red natural de venas: tres paneles principales que se inclinan y barren durante el aleteo. Para cada panel usan un enfoque estándar de “elemento de pala”, calculando la sustentación y la resistencia producidas por muchas tiras diminutas a lo largo del semienvergadura, teniendo en cuenta tanto el movimiento de barrido como la rotación del ala. Al sumar las contribuciones de todos los paneles se obtiene una estimación de la fuerza total y del momento torsor que actúa sobre el robot, con mucha menos computación que en simulaciones acopladas completas fluido-estructura.
De las ecuaciones a fuerzas y momentos en el laboratorio
Para probar su marco, los investigadores construyeron un prototipo de robot de alas aleteantes con alas accionadas por cuerda y raíces de ala ajustables. Usando cámaras de alta velocidad y un sensor de fuerzas de seis ejes, midieron formas reales de las alas, amplitudes de aleteo, sustentación y momentos de control en un rango de frecuencias y torsiones en la raíz. Las mismas condiciones se introdujeron luego en dos modelos: una aproximación tradicional de un solo plano y el nuevo método multipanel. Mientras que el modelo simple tendía a sobreestimar la sustentación —porque empleaba un único ángulo de ataque fijo para todo el ala—, el método multipanel, con sus ángulos de ataque dependientes del panel, se ajustó mucho mejor a los experimentos. En un rango práctico de frecuencias de aleteo, sus predicciones de sustentación se mantuvieron dentro de aproximadamente un 20 por ciento de los valores medidos, y capturó con precisión cómo los comandos de cabeceo y balanceo reducen ligeramente la sustentación a la vez que generan momentos de control que crecen casi perfectamente de forma lineal con la intensidad del comando.
Qué significa esto para los futuros pequeños voladores
Para el público general, la conclusión clave es que los autores han proporcionado una forma rápida y razonablemente precisa de predecir cómo responden las alas flexibles cuando se tuercen sus raíces para gobernar un robot volador diminuto. Al combinar una descripción realista pero compacta del movimiento del ala con un modelo de flujo de aire basado en paneles, muestran que los diseñadores pueden estimar sustentación, resistencia y momentos de control sin simulaciones costosas ni ensayo y error prolongado. Esto ofrece a los ingenieros una caja de herramientas práctica para ajustar la geometría del ala, la frecuencia de aleteo y las estrategias de control, de modo que los vehículos microaéreos tipo insecto puedan mantenerse en vuelo estacionario y responder con nitidez a los comandos de dirección, acercando cada vez más a los robots ágiles del tamaño de un insecto a un uso cotidiano.
Cita: Liu, Z., Zhang, X., Wang, Z. et al. Kinematic and aerodynamic modeling of flexible wings with wing root adjustment for flapping wing micro aerial vehicles. Sci Rep 16, 9827 (2026). https://doi.org/10.1038/s41598-026-40582-8
Palabras clave: vehículo microaéreo de aleteo, alas flexibles, control en la raíz del ala, modelado aerodinámico, robótica bioinspirada