Clear Sky Science · zh
用于无人地面车-机械臂的固定时间队形行为控制
一起移动并协作的机器人
想象一支由若干小型移动机器人组成的队伍,每个机器人都配有机械臂,共同搬运一件物品穿过拥挤的仓库或灾区现场。它们必须保持队形、避开障碍并稳固抓持物体,同时还要抵抗碰撞、摩擦或载荷移动等干扰。本文提出了一种新的控制方法,使这类机器人团队能够在竞争目标之间协调动作,并在有保证的短时间内可靠地达成任务。
地面机器人协作为何困难
无人地面车-机械臂(UGVMs)将有轮底盘与机械臂结合,既能移动又能操作物体,因此在物料搬运、协同装配和搜救等任务中具有吸引力。但同时协调多个此类机器非常棘手。它们的车轮不能侧向滑动,限制了运动能力;机械臂引入复杂的力和运动;环境则带来诸如不平地面或未知载荷的干扰。当若干UGVMs共同抬运一件物体时,必须保持稳定队形、绕开障碍并正确控制机械臂,这三项目标常常相互冲突。
现有控制方法的局限
早期研究解决了该难题的部分方面,但很少同时覆盖全部需求。基于行为的方法将“前往目标”“避障”等基本动作组合在一起,但通常缺乏能保证系统稳定性的严格证明。基于一致性的(consensus)方法通过通信让机器人达成共同运动,但通常只关注单一目标,缺乏系统化的冲突任务优先级处理。其它高级策略如模型预测控制和安全屏障函数能提供强的安全性保证,但计算代价高,对实时多机器人系统不利。许多方法还假设机器人能任意方向运动,忽视了真实UGVM的非侧滑轮约束,并且大多只保证误差逐渐收缩,而没有给出确定的收敛时间界限。
一种快速可靠协同的两层方案
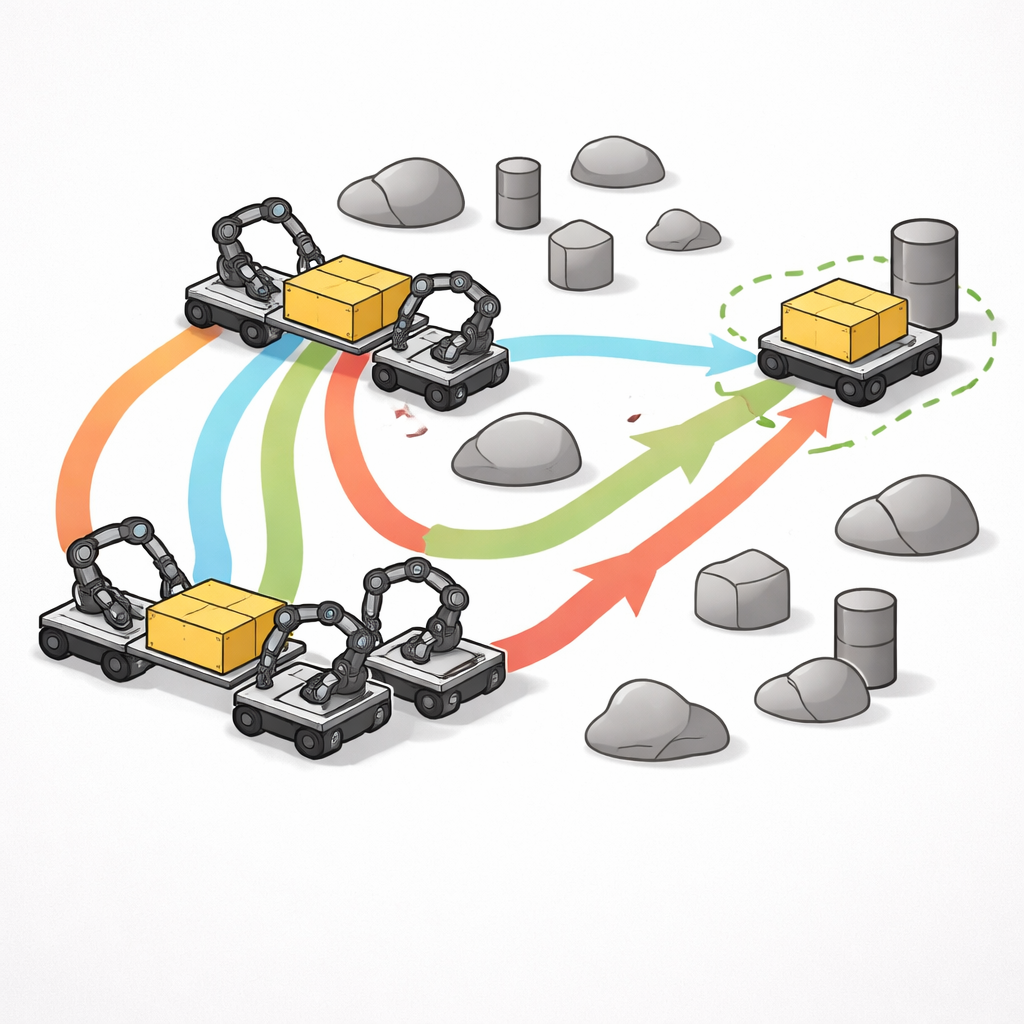
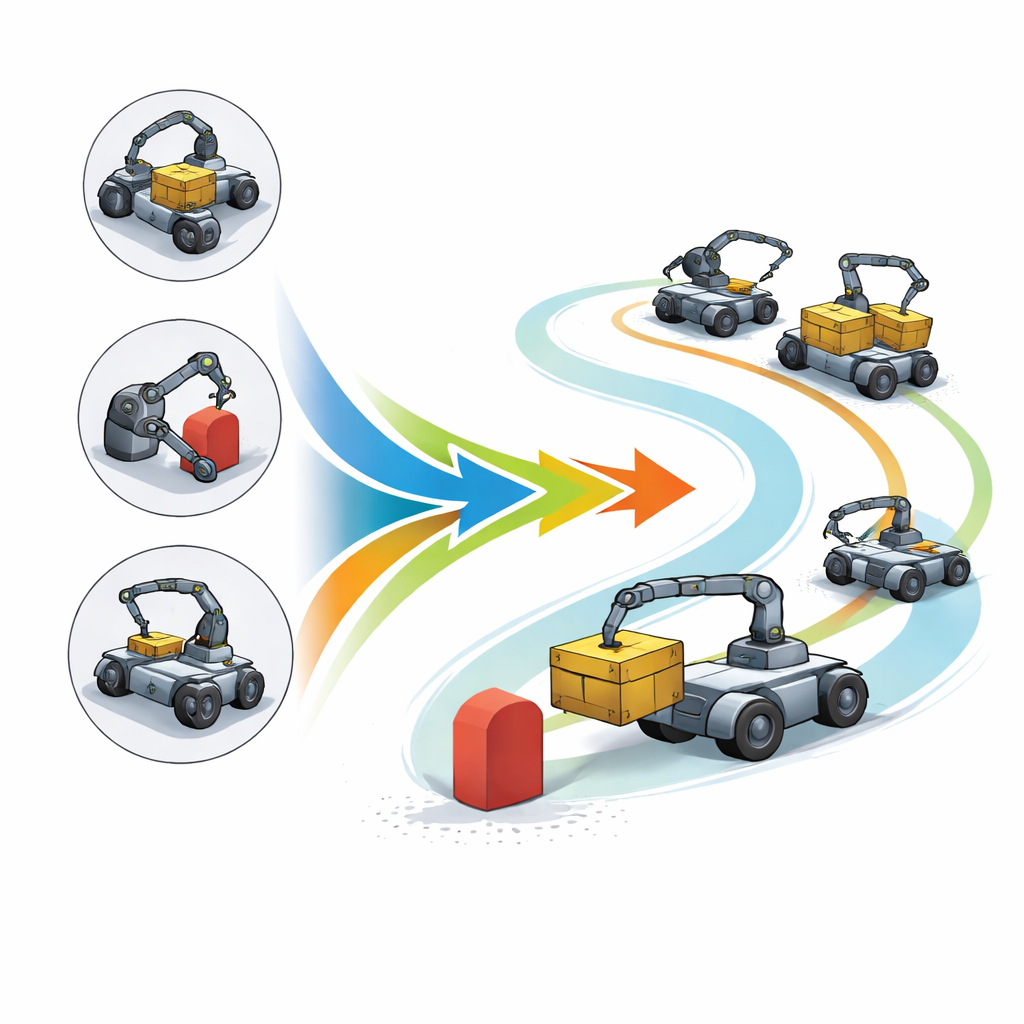
作者提出了一种两层固定时间队形行为控制(Fixed-FBC)方法,将多机器人协同、非侧滑轮约束和对干扰的鲁棒性统一起来。在运动规划(运动学)层面,他们扩展了一种称为零空间行为控制(null-space-based behavioral control)的数学框架,使其遵循轮式运动限制并直接处理航向与位置之间的耦合。在该框架内,设计了三种基本行为:维持群体队形、作为队形整体的避障,以及控制每台机器人的机械臂运动。这些行为按优先级堆叠——避障优于队形维护,二者又优于臂部运动——低优先级动作被投影到高优先级动作的“剩余”运动空间中。固定时间稳定策略决定了误差如何被修正,保证所有任务误差在与初始误差大小无关的时间界限内收缩到小范围。
针对干扰与不确定性的鲁棒控制
当运动规划层为每台UGVM生成期望速度后,第二个动力学层确保实际电机和关节能在不确定的机器人参数和外部扰动下跟踪该期望。在这一层,作者设计了自适应固定时间跟踪控制器。自适应律持续估计未知参数(如质量和摩擦项),同时滑模成分用于抑制外部扰动。通过结合这些要素,控制器将期望速度与实际速度之间的误差在保证的固定时间内驱动到接近零的小邻域。利用Lyapunov方法的理论分析表明,任务层误差(队形、障碍间距、臂部位置)和跟踪误差都能快速且可预测地收敛。
仿真揭示的性能
计算机仿真实验在四台UGVMs的团队上进行了检验,场景中存在静态圆形障碍。机器人在受到时变扰动时仍能成功保持队形并与障碍保持安全距离,同时机械臂跟踪期望的关节动作。当队形路径与避障发生冲突时,控制器会自动优先保证安全,绕开障碍,然后平滑地恢复期望队形。与早期的“有限时间”和传统队形控制器相比,新的Fixed-FBC方法在某些阶段将稳定时间缩短了约四分之三,意味着机器人更快达到稳定协同状态,同时不牺牲安全性或鲁棒性。
对现实机器人团队的启示
对于非专业读者,核心思想是:这项工作赋予多机器人团队一种有纪律、快速响应的“群体反射”。机器人不再缓慢地趋于正确配置,而是在预设时间内被数学地保证进入安全队形并校正机械臂动作,即便在受到碰撞、承载不确定载荷或需要绕障时亦是如此。通过在一个尊重轮式机器人真实运动特性的框架内统一队形保持、避障与臂部控制,该方法使工厂、仓库和救援任务中的协同机器人群更接近可依赖的现实部署。
引用: Xue, W., Lu, W., Zhang, X. et al. Fixed-time formation behavior control for unmanned ground vehicle-manipulators. Sci Rep 16, 10703 (2026). https://doi.org/10.1038/s41598-026-43223-2
关键词: 多机器人协同, 移动机械臂, 队形控制, 避障, 固定时间控制