Clear Sky Science · fr
Contrôle du comportement de formation en temps fini pour véhicules terrestres non habitables avec manipulateurs
Robots qui se déplacent et opèrent ensemble
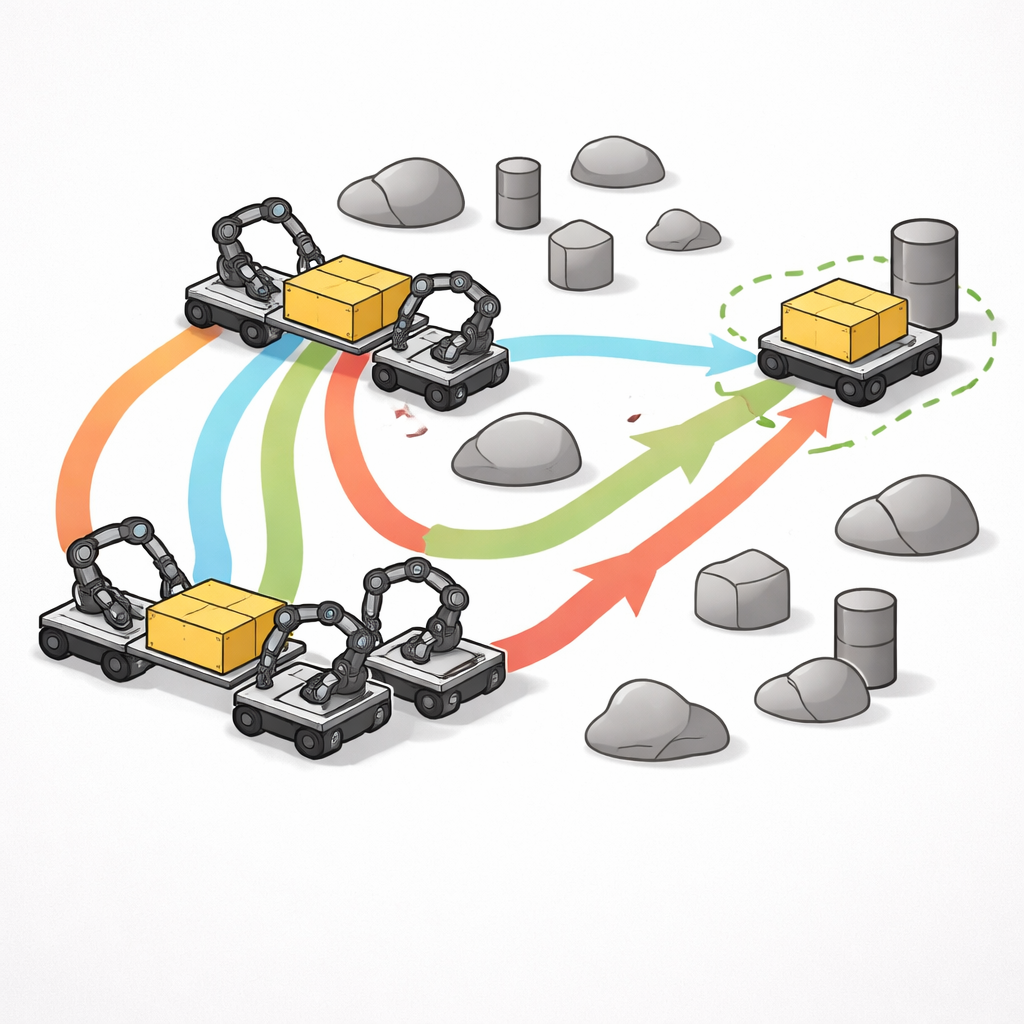
Imaginez une équipe de petits robots mobiles, chacun équipé de son propre bras robotique, transportant une charge commune à travers un entrepôt encombré ou un site de sinistre. Ils doivent rester en formation, éviter les obstacles et maintenir une prise solide sur l’objet, alors que des perturbations comme des chocs, la friction ou des déplacements de charge cherchent à les déstabiliser. Cet article présente une nouvelle méthode de contrôle qui permet à de telles équipes robotiques de concilier ces exigences concurrentes et d’atteindre leurs objectifs de manière fiable en un temps court garanti.
Pourquoi le travail d’équipe est difficile pour les robots terrestres
Les véhicules terrestres non habitables avec manipulateurs (UGVM) combinent une base roulante et un bras robotique, ce qui leur permet à la fois de se déplacer et de manipuler des objets. Cela les rend utiles pour des tâches comme la manutention, l’assemblage coopératif et les missions de recherche et sauvetage. Mais coordonner plusieurs de ces machines est délicat. Leurs roues ne peuvent pas glisser latéralement, ce qui restreint leurs possibilités de mouvement. Parallèlement, leurs bras introduisent des forces et des mouvements complexes, et l’environnement ajoute des perturbations telles que des sols irréguliers ou des charges inconnues. Quand plusieurs UGVM transportent un même objet, ils doivent maintenir une formation stable, contourner les obstacles et commander correctement leurs bras — trois objectifs qui se heurtent souvent les uns aux autres.
Limites des approches de contrôle existantes
Les travaux antérieurs ont abordé des parties de ce casse-tête, mais rarement l’ensemble. Les méthodes basées sur le comportement combinent des actions simples comme « aller vers l’objectif » et « éviter l’obstacle », mais elles manquent souvent de garanties rigoureuses de stabilité de l’équipe. Les méthodes basées sur le consensus permettent aux robots de s’accorder sur un mouvement commun via la communication, mais elles se concentrent généralement sur un seul objectif et n’offrent pas de mécanisme systématique pour hiérarchiser des tâches conflictuelles. D’autres stratégies avancées, telles que le contrôle prédictif par modèle et les fonctions-barrières de sécurité, peuvent fournir de fortes garanties de sûreté mais à un coût informatique élevé, problématique pour des systèmes multi-robots en temps réel. Beaucoup de ces méthodes supposent aussi des robots pouvant se déplacer librement dans toutes les directions, ignorant la contrainte de non-glissement des roues des UGVM réels, et la plupart garantissent seulement une décroissance progressive des erreurs plutôt qu’une réduction dans une durée connue à l’avance.
Un plan en deux couches pour une coordination rapide et fiable
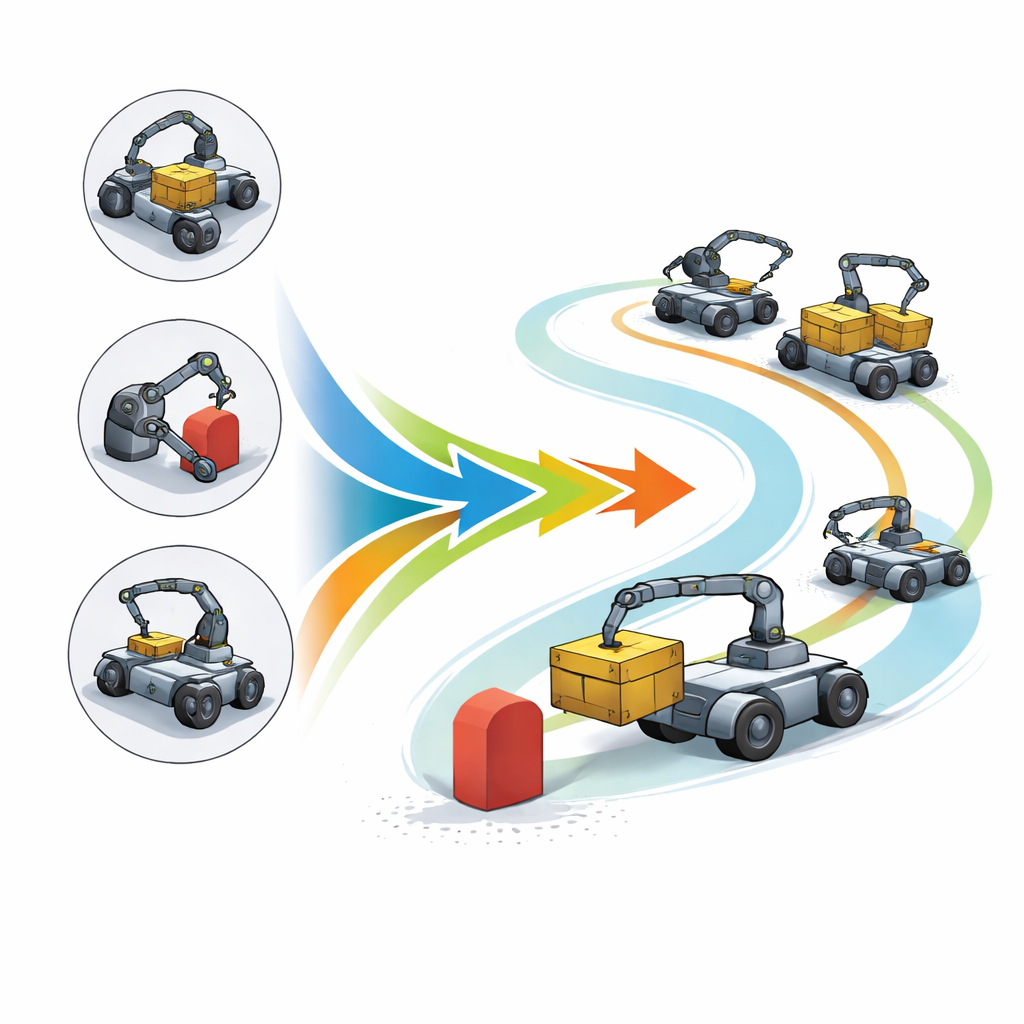
Les auteurs proposent une méthode de contrôle de comportement de formation en temps fini à deux couches (Fixed-FBC) qui unifie la coordination multi-robots, la contrainte de non-glissement des roues et la robustesse aux perturbations. À la couche de planification de mouvement (cinématique), ils étendent un cadre mathématique appelé contrôle comportemental basé sur l’espace nul pour qu’il respecte les limites de mouvement des roues et gère directement l’accouplement entre l’orientation du véhicule et sa position. Dans ce cadre, ils conçoivent trois comportements de base : maintien de la formation du groupe, évitement d’obstacles en formation et contrôle du mouvement des bras de chaque robot. Ces comportements sont empilés selon un ordre de priorité — l’évitement d’obstacles au-dessus du maintien de la formation, et les deux au-dessus du mouvement des bras — et les actions de priorité inférieure sont projetées dans l’espace de mouvement « restant » des actions de priorité supérieure. Une stratégie de stabilité en temps fini façonne la façon dont les erreurs sont corrigées, garantissant que toutes les erreurs de tâche décroissent jusqu’à de faibles valeurs dans un intervalle de temps borné qui ne dépend pas de l’amplitude initiale des erreurs.
Contrôle robuste face aux perturbations et incertitudes
Une fois que la couche de planification de mouvement produit une vitesse désirée pour chaque UGVM, une seconde couche dynamique s’assure que les moteurs et articulations réels suivent ce plan malgré des paramètres robot incertains et des perturbations externes. Ici, les auteurs conçoivent un contrôleur de suivi adaptatif en temps fini. Des lois adaptatives estiment en continu des propriétés inconnues, telles que la masse et les termes de friction, tandis qu’une composante de type sliding-mode contribue à rejeter les perturbations externes. En combinant ces éléments, le contrôleur pousse l’écart entre les vitesses désirées et réelles vers un petit voisinage de zéro dans un temps fixe garanti. L’analyse théorique fondée sur des méthodes de Lyapunov montre que tant les erreurs au niveau des tâches (formation, dégagement d’obstacles, positions des bras) que les erreurs de suivi convergent rapidement et de manière prévisible.
Ce que les simulations révèlent sur les performances
Des simulations numériques démontrent la méthode sur une équipe de quatre UGVM transportant un objet à travers des environnements parsemés d’obstacles circulaires statiques. Les robots maintiennent avec succès leur formation et gardent une distance de sécurité par rapport aux obstacles tout en faisant suivre à leurs bras les mouvements articulaires désirés, même soumis à des perturbations variant dans le temps. Lorsque la trajectoire de formation entre en conflit avec l’évitement d’obstacles, le contrôleur priorise automatiquement la sécurité, contourne l’obstacle puis rétablit en douceur la formation souhaitée. Comparée aux contrôleurs de formation « en temps fini » antérieurs et aux contrôleurs classiques, la nouvelle approche Fixed-FBC réduit les temps d’établissement jusqu’à environ trois quarts dans certaines phases, ce qui signifie que les robots atteignent un comportement stable et coordonné beaucoup plus rapidement sans sacrifier la sécurité ni la robustesse.
Enseignement pour les équipes robotiques du monde réel
Pour un lecteur non spécialiste, l’idée clé est que ce travail dote les équipes multi-robots d’une sorte de « réflexe de groupe » discipliné et rapide. Plutôt que de dériver lentement vers la bonne configuration, les robots sont garantis mathématiquement pour se stabiliser dans des formations sûres et corriger les mouvements des bras dans un délai prédéterminé, même lorsqu’ils sont heurtés, chargés d’une payload incertaine ou contraints de manœuvrer autour d’obstacles. En unifiant le maintien de formation, l’évitement d’obstacles et le contrôle des bras dans un même cadre qui respecte la vraie mobilité des robots à roues, cette méthode rapproche les essaims de robots coordonnés dans les usines, entrepôts et missions de secours d’un déploiement fiable dans le monde réel.
Citation: Xue, W., Lu, W., Zhang, X. et al. Fixed-time formation behavior control for unmanned ground vehicle-manipulators. Sci Rep 16, 10703 (2026). https://doi.org/10.1038/s41598-026-43223-2
Mots-clés: coordination multi-robots, manipulateurs mobiles, contrôle de formation, évitement d'obstacles, contrôle en temps fini