Clear Sky Science · sv
Fastsättningstidsstyrning av formationsbeteende för obemannade markfordon-manipulatorer
Robotar som rör sig och arbetar tillsammans
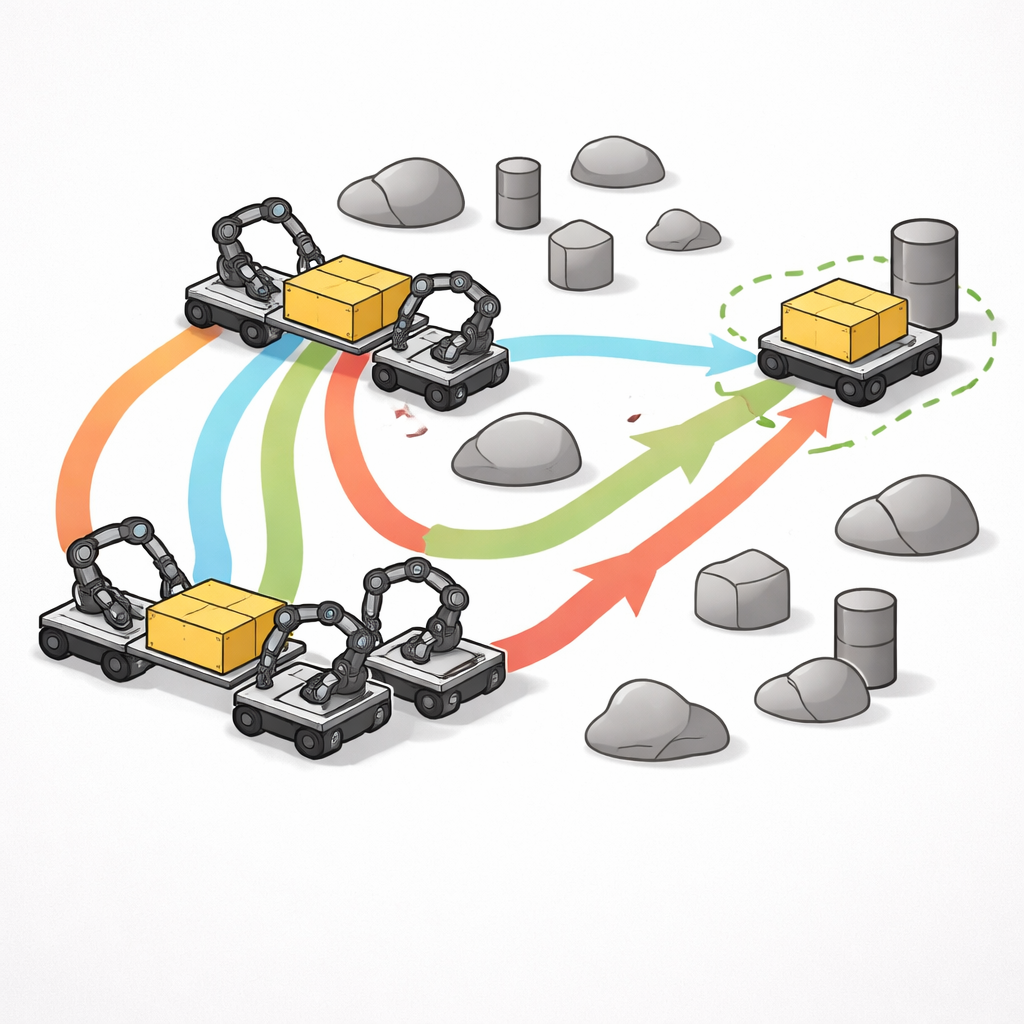
Föreställ dig ett team av små mobila robotar, var och en utrustad med en robotarm, som tillsammans bär en gemensam last genom ett trångt lager eller ett katastrofområde. De måste hålla formationen, undvika hinder och behålla ett stabilt grepp om föremålet, samtidigt som stötar, friktion eller lastförskjutningar försöker rubba dem. Denna artikel presenterar en ny styrmetod som låter sådana robotteam samordna dessa konkurrerande krav och nå sina mål pålitligt inom en garanterat kort tid.
Därför är lagarbete svårt för markrobotar
Obemannade markfordon-manipulatorer (UGVM) kombinerar ett hjulburet underrede med en robotarm, så att de både kan förflytta sig och manipulera objekt. Det gör dem användbara för uppgifter som materialhantering, samverkande montering och sök- och räddningsinsatser. Att samordna flera sådana maskiner samtidigt är dock komplicerat. Deras hjul kan inte glida sidledes, vilket begränsar hur de kan röra sig. Samtidigt introducerar armarna komplexa krafter och rörelser, och omgivningen tillför störningar som ojämn mark eller okända laster. När flera UGVM bär ett objekt måste de upprätthålla en stabil formation, navigera runt hinder och styra sina armar korrekt — tre mål som ofta står i konflikt med varandra.
Begränsningar i befintliga styrmetoder
Tidigare forskning har angripit delar av denna utmaning men sällan allt på en gång. Beteendebaserade metoder blandar grundläggande handlingar som ”gå till mål” och ”undvik hinder”, men saknar ofta rigorösa garantier för att teamet förblir stabilt. Konsensusbaserade metoder låter robotar enas om en gemensam rörelse via kommunikation, men fokuserar vanligen på ett enda mål och saknar systematiska sätt att prioritera motstridiga uppgifter. Andra avancerade strategier, såsom model predictive control och säkerhetsbarriärfunktioner, kan ge starka säkerhetsgarantier men till en hög beräkningskostnad, vilket är problematiskt för realtidssystem med flera robotar. Många av dessa metoder antar också att robotarna kan röra sig fritt i alla riktningar och ignorerar de icke-slickande hjulbegränsningarna som verkliga UGVM har, och de flesta garanterar bara att fel minskar gradvis snarare än inom en känd tidsgräns.
En tvålagersplan för snabb, pålitlig samordning
Författarna föreslår en tvålagers fast-tids formationsbeteendestyrning (Fixed-FBC) som förenar flerarobotkoordinering, icke-slickande hjulbegränsningar och robusthet mot störningar. På rörelseplaneringsnivån (kinematiken) utvidgar de en matematisk ram kallad null-space-baserad beteendestyrning så att den respekterar hjulens rörelsebegränsningar och direkt hanterar kopplingen mellan farkostens riktning och position. Inom denna ram utformar de tre grundläggande beteenden: bibehålla gruppformationen, undvika hinder som en formation och styra varje robots armrörelse. Dessa beteenden staplas i prioritetsordning — hinderundvikande över formationshållning, och båda över armrörelse — och lägreprioriterade handlingar projiceras in i den "överblivna" rörelsebaren hos högre prioriterade. En fast-tidsstabilitetsstrategi formar hur fel korrigeras och garanterar att alla uppgiftsfel krymper till små värden inom en tidsgräns som inte beror på hur stora felen var från början.
Robust styrning mot störningar och osäkerheter
När rörelseplaneringslagret har tagit fram en önskad hastighet för varje UGVM säkerställer ett andra, dynamiskt lager att de faktiska motorerna och lederna följer denna plan trots osäkra robotparametrar och yttre störningar. Här utformar författarna en adaptiv fast-tids följningskontroll. Adaptiva lagar uppskattar kontinuerligt okända egenskaper, såsom massa och friktionsled, medan en sliding-mode-komponent verkar för att avvisa externa störningar. Genom att kombinera dessa element driver regulatorn mismatchen mellan önskad och faktisk hastighet till ett litet område kring noll inom en garanterad fast tid. Teoretisk analys med Lyapunov-metoder visar att både uppgiftsnivåfel (formation, hinderfrihet, armpositioner) och följningsfel konvergerar snabbt och förutsägbart.
Vad simuleringar visar om prestanda
Datasimuleringar demonstrerar metoden på ett team om fyra UGVM som transporterar ett objekt genom miljöer med statiska cirkulära hinder. Robotarna håller framgångsrikt sin formation och behåller ett säkert avstånd till hinder samtidigt som deras armar följer önskade lederörelser, även under tidsvarierande störningar. När formationsbanan kolliderar med hinderprioritering prioriterar regulatorn automatiskt säkerheten, kör runt hindret och återställer sedan smidigt den önskade formationen. Jämfört med tidigare "finite-time"- och klassiska formationskontroller minskar den nya Fixed-FBC-metoden insättningstiderna med upp till omkring tre fjärdedelar i vissa faser, vilket innebär att robotarna når stabilt, samordnat beteende mycket snabbare utan att offra säkerhet eller robusthet.
Slutsats för robotteam i verkliga världen
För en icke-expert är huvudidén att detta arbete ger flerarobotteam en sorts disciplinerad, snabbverkande "gruppreflex." Istället för att långsamt driva in i rätt konfiguration garanteras robotarna matematisk att de kommer att sätta sig i säkra formationer och korrigera armrörelser inom en förinställd tid, även när de blir stötade, lastade med osäkra laster eller tvingas slingra sig runt hinder. Genom att förena formationshållning, hinderundvikande och armstyrning i en ram som respekterar hur hjulburna robotar faktiskt rör sig tar denna metod koordinerade robotsvärmar i fabriker, lager och räddningsinsatser ett steg närmare pålitlig, verklig användning.
Citering: Xue, W., Lu, W., Zhang, X. et al. Fixed-time formation behavior control for unmanned ground vehicle-manipulators. Sci Rep 16, 10703 (2026). https://doi.org/10.1038/s41598-026-43223-2
Nyckelord: koordinering mellan flera robotar, mobila manipulatorer, formationskontroll, hinderundvikande, fast-tidsstyrning