Clear Sky Science · pt
Controle de comportamento de formação em tempo fixo para veículos-manipuladores terrestres não tripulados
Robôs que se Movem Juntos e Trabalham Juntos
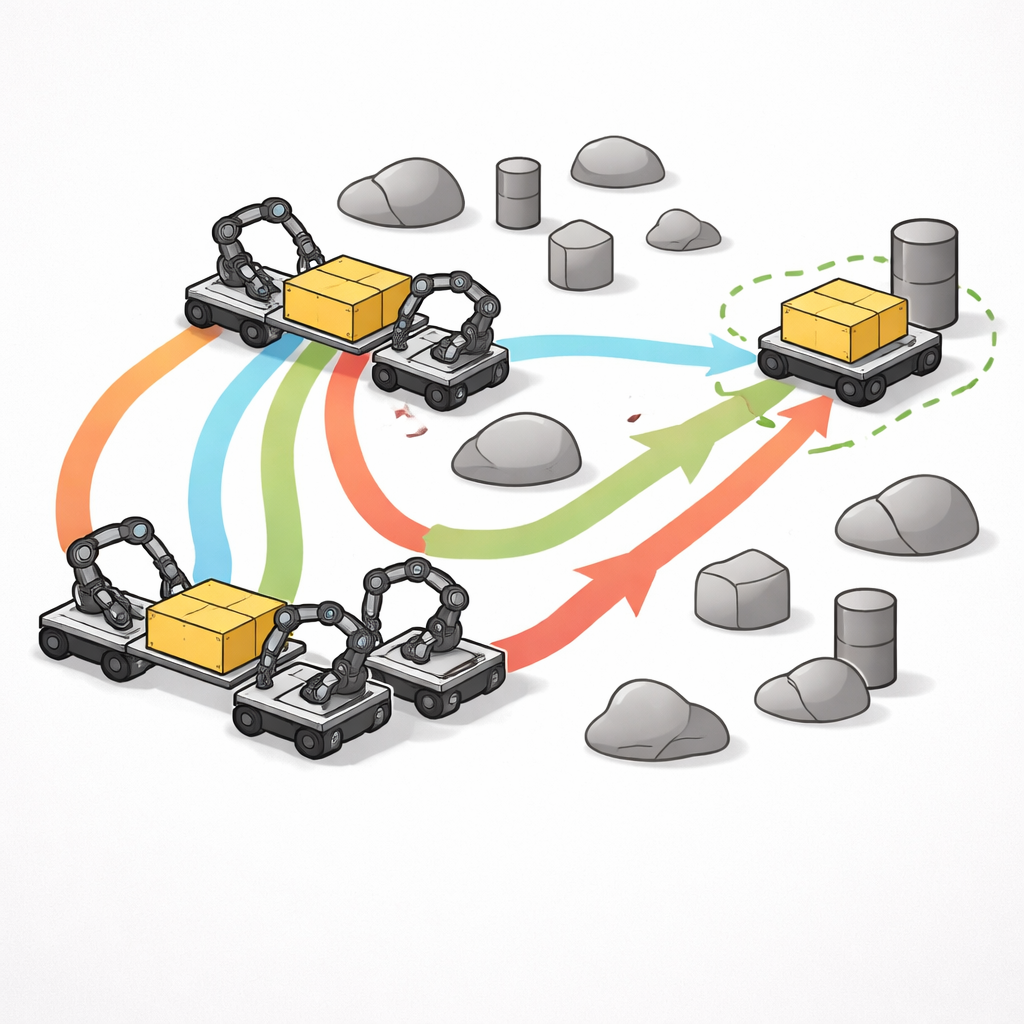
Imagine uma equipe de pequenos robôs móveis, cada um com seu próprio braço robótico, carregando uma carga comum por um armazém ou local de desastre cheio de obstáculos. Eles precisam manter a formação, evitar obstáculos e manter uma pegada firme no objeto, tudo enquanto perturbações como colisões, atrito ou deslocamentos da carga tentam desestabilizá‑los. Este artigo apresenta um novo método de controle que permite a equipes de robôs coordenar essas demandas conflitantes e alcançar seus objetivos de forma confiável dentro de um tempo curto garantido.
Por que o Trabalho em Equipe é Difícil para Robôs Terrestres
Veículos-manipuladores terrestres não tripulados (UGVMs) combinam uma base com rodas e um braço robótico, permitindo que se locomovam e manipulem objetos. Isso os torna atrativos para tarefas como manuseio de materiais, montagem cooperativa e busca e resgate. Mas coordenar vários desses robôs ao mesmo tempo é complicado. Suas rodas não deslizam lateralmente, o que restringe como podem se mover. Ao mesmo tempo, os braços introduzem forças e movimentos complexos, e o ambiente adiciona perturbações como terreno irregular ou cargas desconhecidas. Quando vários UGVMs carregam um único objeto, precisam manter uma formação estável, desviar de obstáculos e mover seus braços corretamente — três objetivos que muitas vezes entram em conflito.
Limitações das Abordagens de Controle Existentes
Pesquisas anteriores abordaram partes desse quebra‑cabeça, mas raramente tudo ao mesmo tempo. Métodos baseados em comportamento misturam ações básicas como “ir ao alvo” e “evitar obstáculo”, mas frequentemente carecem de garantias rigorosas de que a equipe permanecerá estável. Métodos baseados em consenso permitem que os robôs concordem em um movimento comum via comunicação, mas geralmente se concentram em um único objetivo e não oferecem uma forma sistemática de priorizar tarefas conflitantes. Outras estratégias avançadas, como controle preditivo baseado em modelo e funções de barreira de segurança, podem fornecer fortes garantias de segurança, porém com alto custo computacional, o que é problemático para sistemas multi‑robô em tempo real. Muitos desses métodos também assumem robôs que podem se mover livremente em qualquer direção, ignorando as restrições de rodas sem deslizamento que robôs UGVM reais enfrentam, e a maioria apenas garante que os erros diminuam gradualmente em vez de dentro de um limite de tempo conhecido.
Um Plano em Duas Camadas para Coordenação Rápida e Confiável
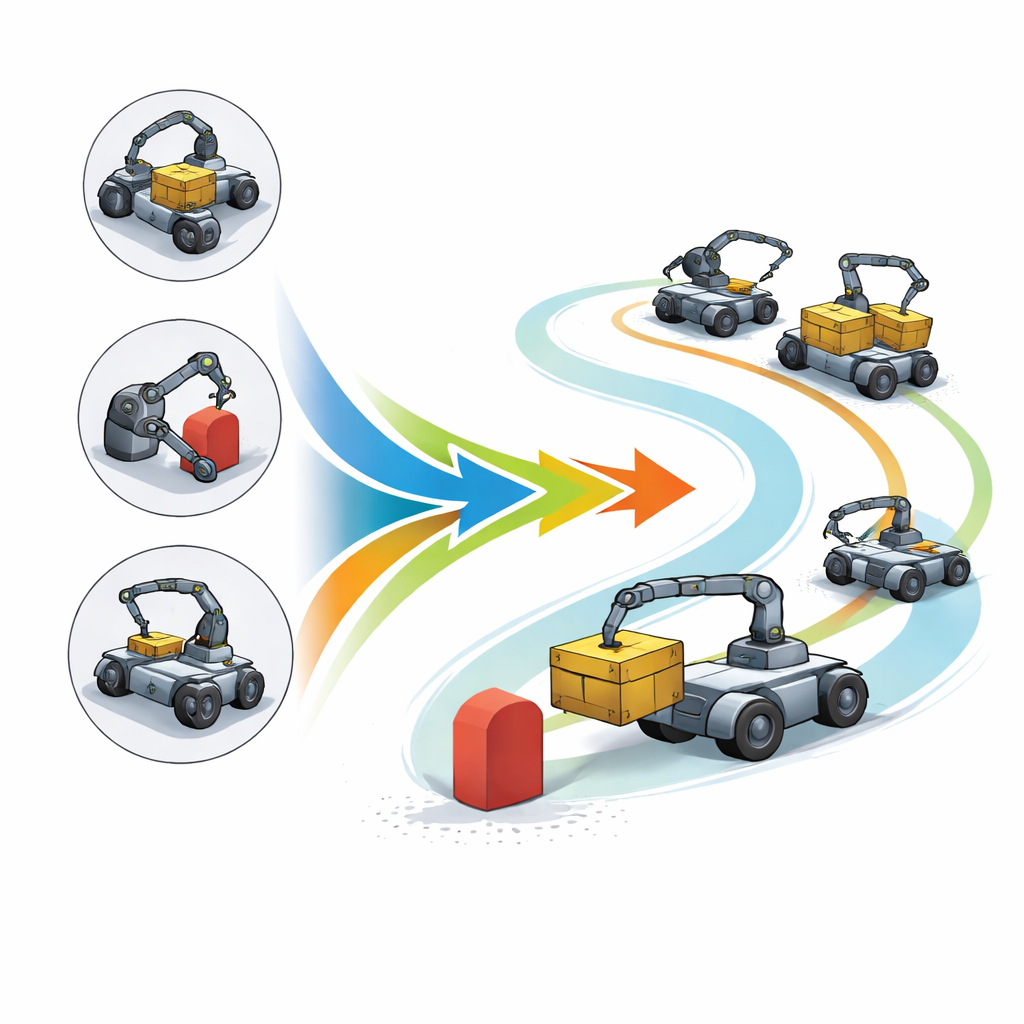
Os autores propõem um método de controle de comportamento de formação em tempo fixo em duas camadas (Fixed‑FBC) que unifica coordenação multi‑robô, restrições de rodas sem deslizamento e robustez a perturbações. Na camada de planejamento de movimento (cinemática), eles estendem um arcabouço matemático chamado controle comportamental baseado em espaço nulo para que respeite os limites de movimento de robôs com rodas e manipule diretamente o acoplamento entre o cabeamento do veículo e sua posição. Dentro desse arcabouço, projetam três comportamentos básicos: manter a formação do grupo, evitar obstáculos como formação e controlar o movimento do braço de cada robô. Esses comportamentos são empilhados em ordem de prioridade — evitação de obstáculos acima da manutenção de formação, e ambas acima do movimento do braço — e ações de prioridade inferior são projetadas no espaço de movimento “sobrante” das de maior prioridade. Uma estratégia de estabilidade em tempo fixo define como os erros são corrigidos, garantindo que todos os erros de tarefa encolham até valores pequenos dentro de um limite de tempo que não depende do tamanho dos erros iniciais.
Controle Robusto Contra Perturbações e Incertezas
Uma vez que a camada de planejamento de movimento produz uma velocidade desejada para cada UGVM, uma segunda camada dinâmica garante que os motores e juntas reais sigam esse plano apesar de parâmetros robóticos incertos e distúrbios externos. Aqui, os autores projetam um controlador de rastreamento adaptativo em tempo fixo. Leis adaptativas estimam continuamente propriedades desconhecidas, como massa e termos de atrito, enquanto um componente em modo deslizante trabalha para rejeitar perturbações externas. Ao combinar esses elementos, o controlador leva a discrepância entre velocidades desejadas e reais para uma pequena vizinhança em torno de zero dentro de um tempo fixo garantido. A análise teórica usando métodos de Lyapunov mostra que tanto os erros no nível de tarefa (formação, distância segura a obstáculos, posições dos braços) quanto os erros de rastreamento convergem de forma rápida e previsível.
O que as Simulações Revelam Sobre o Desempenho
Simulações por computador demonstram o método em uma equipe de quatro UGVMs transportando um objeto por ambientes com obstáculos circulares estáticos. Os robôs mantêm com sucesso a formação e preservam uma distância segura dos obstáculos enquanto seus braços acompanham os movimentos articulares desejados, mesmo sob perturbações variáveis no tempo. Quando a trajetória de formação entra em conflito com a evitação de obstáculos, o controlador prioriza automaticamente a segurança, desvia ao redor do obstáculo e então restaura suavemente a formação desejada. Comparado com controladores anteriores de “tempo finito” e controladores clássicos de formação, a nova abordagem Fixed‑FBC reduz tempos de assentamento em até cerca de três quartos em algumas fases, o que significa que os robôs alcançam um comportamento estável e coordenado muito mais rápido sem sacrificar segurança ou robustez.
Conclusão para Equipes de Robôs no Mundo Real
Para um leitor leigo, a ideia central é que este trabalho dá às equipes multi‑robô uma espécie de “reflexo de grupo” disciplinado e de atuação rápida. Em vez de derivarem lentamente para a configuração correta, os robôs têm garantia matemática de se estabelecerem em formações seguras e corrigirem os movimentos dos braços dentro de um tempo predefinido, mesmo quando são esbarrados, carregam cargas incertas ou precisam manobrar em meio a obstáculos. Ao unificar manutenção de formação, evitação de obstáculos e controle de braço em um único arcabouço que respeita a forma real como robôs com rodas se movem, este método aproxima enxames coordenados de robôs em fábricas, armazéns e missões de resgate de uma implantação confiável no mundo real.
Citação: Xue, W., Lu, W., Zhang, X. et al. Fixed-time formation behavior control for unmanned ground vehicle-manipulators. Sci Rep 16, 10703 (2026). https://doi.org/10.1038/s41598-026-43223-2
Palavras-chave: coordenação multi-robô, manipuladores móveis, controle de formação, evitação de obstáculos, controle em tempo fixo