Clear Sky Science · pl
Sterowanie zachowaniem formacji w stałym czasie dla pozaziemskich pojazdów naziemnych z manipulatorami
Roboty, które poruszają się razem i pracują razem
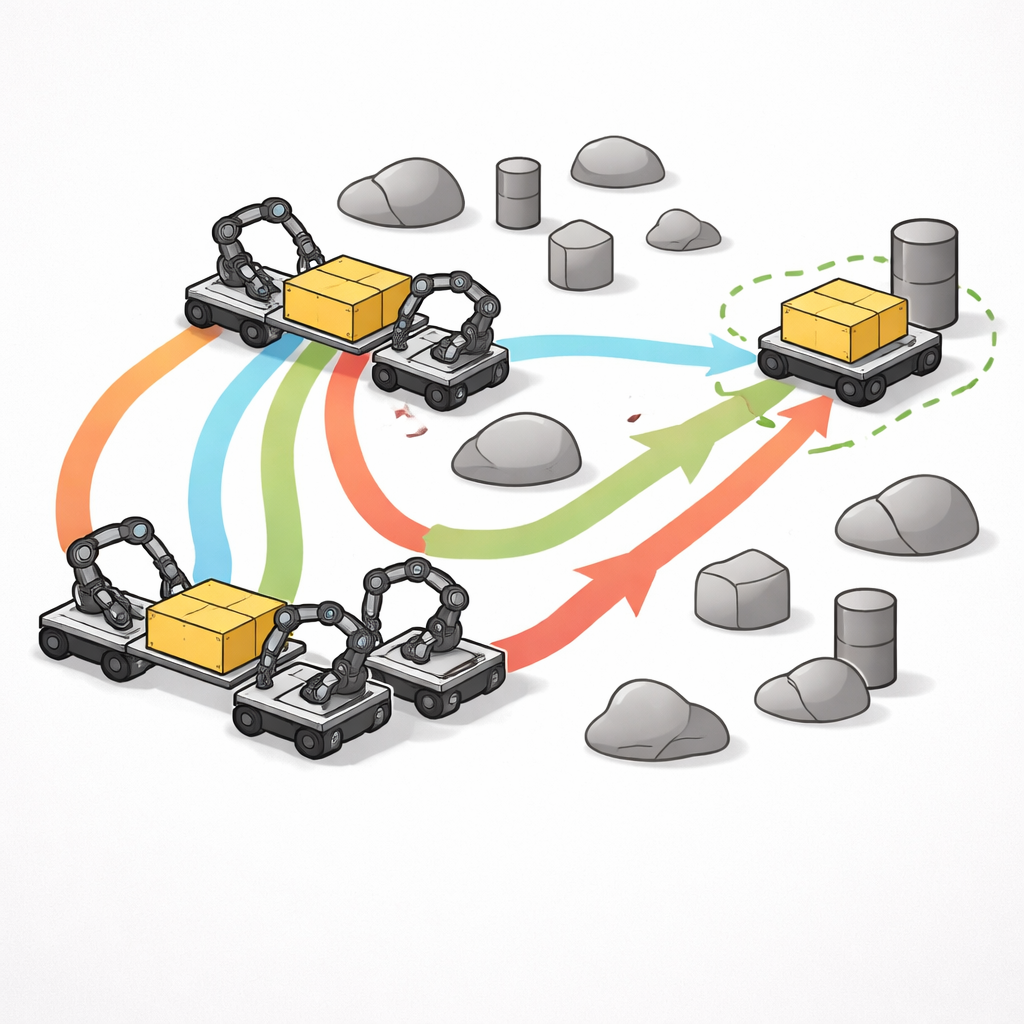
Wyobraź sobie zespół małych mobilnych robotów, każdy z własnym ramieniem manipulatora, niosących wspólny ładunek przez zagracony magazyn lub teren katastrofy. Muszą utrzymać formację, unikać przeszkód i pewnie trzymać ładunek, podczas gdy zakłócenia takie jak uderzenia, tarcie czy przesunięcia ładunku próbują je wytrącić z równowagi. W artykule przedstawiono nową metodę sterowania, która pozwala takim zespołom robotów godzić te sprzeczne wymagania i osiągać cele niezawodnie w gwarantowanie krót- kim, stałym czasie.
Dlaczego współpraca jest trudna dla robotów naziemnych
Pojazdy naziemne z manipulatorami (UGVM) łączą podwozie z kołami z ramieniem robotycznym, dzięki czemu mogą się poruszać i manipulować obiektami. To czyni je atrakcyjnymi do zadań takich jak obsługa materiałów, współpraca przy montażu czy akcje poszukiwawczo-ratownicze. Jednak koordynacja kilku takich maszyn naraz jest trudna. Ich koła nie mogą ślizgać się bocznie, co ogranicza sposób poruszania się. Jednocześnie ramiona wprowadzają złożone siły i ruchy, a środowisko dodaje zakłócenia, takie jak nierówne podłoże czy nieznane ładunki. Gdy kilka UGVM przenosi jeden obiekt, muszą utrzymać stabilną formację, omijać przeszkody i poprawnie poruszać ramionami — trzy cele, które często stoją ze sobą w konflikcie.
Ograniczenia istniejących podejść sterowania
Wcześniejsze badania rozwiązywały fragmenty tej układanki, ale rzadko wszystkie naraz. Metody oparte na zachowaniu łączą podstawowe działania, takie jak «do celu» i «unikaj przeszkody», lecz często brakuje im rygorystycznych gwarancji stabilności zespołu. Metody oparte na konsensusie pozwalają robotom uzgadniać wspólny ruch poprzez komunikację, jednak zwykle koncentrują się na jednym celu i nie dają systematycznego sposobu priorytetyzacji sprzecznych zadań. Inne zaawansowane strategie, takie jak sterowanie predykcyjne modelowe i funkcje bariery bezpieczeństwa, mogą zapewniać silne gwarancje bezpieczeństwa, ale kosztem dużego obciążenia obliczeniowego, co jest problematyczne dla systemów wielorobotowych działających w czasie rzeczywistym. Wiele z tych metod zakłada też roboty zdolne do ruchu w dowolnym kierunku, ignorując ograniczenia wynikające z nieślizgających się kół rzeczywistych UGVM, a większość zapewnia jedynie stopniowe zmniejszanie błędów, zamiast gwarantowanego zaniku w określonym, znanym czasie.
Dwuwarstwowy plan dla szybkiej, niezawodnej koordynacji
Autorzy proponują dwuwarstwową metodę sterowania zachowaniem formacji o stałym czasie (Fixed-FBC), która integruje koordynację wielorobotową, ograniczenia wynikające z nieślizgających się kół oraz odporność na zakłócenia. Na warstwie planowania ruchu (kinematycznej) rozszerzają matematyczne ramy zwane sterowaniem behawioralnym w przestrzeni null, tak aby respektowały ograniczenia ruchu kołowego i bezpośrednio uwzględniały sprzężenie między kursem pojazdu a jego pozycją. W ramach tych ram zaprojektowano trzy podstawowe zachowania: utrzymanie formacji grupy, unikanie przeszkód jako formacja oraz sterowanie ruchem ramion każdego robota. Zachowania te są układane w kolejności priorytetów — unikanie przeszkód nad utrzymaniem formacji, a oba nad ruchem ramion — a działania o niższym priorytecie są rzutowane w „pozostałą” przestrzeń ruchu działań o wyższym priorytecie. Strategia stabilności w stałym czasie kształtuje sposób korygowania błędów, gwarantując, że wszystkie błędy zadań zmaleją do małych wartości w ramach granicznego czasu, który nie zależy od początkowej wielkości błędów.
Odporne sterowanie wobec zakłóceń i niepewności
Gdy warstwa planowania ruchu generuje pożądaną prędkość dla każdego UGVM, druga, dynamiczna warstwa zapewnia, że rzeczywiste silniki i stawy nadążają za tym planem mimo niepewnych parametrów robota i zewnętrznych zakłóceń. Tutaj autorzy projektują adaptacyjny regulator śledzący działający w stałym czasie. Prawa adaptacyjne ciągle szacują nieznane własności, takie jak masa i składniki tarcia, podczas gdy składnik typu sliding-mode działa na odrzucenie zakłóceń zewnętrznych. Łącząc te elementy, regulator zmniejsza różnicę między pożądanymi a rzeczywistymi prędkościami do małego otoczenia zera w zagwarantowanym stałym czasie. Analiza teoretyczna z użyciem metod Lyapunova pokazuje, że zarówno błędy na poziomie zadań (formacja, zachowanie odstępu od przeszkód, pozycje ramion), jak i błędy śledzenia zbieżają szybko i przewidywalnie.
Co symulacje pokazują o wydajności
Symulacje komputerowe demonstrują metodę na zespole czterech UGVM przenoszących obiekt przez środowiska z nieruchomymi, okrągłymi przeszkodami. Roboty skutecznie utrzymują formację i zachowują bezpieczną odległość od przeszkód, podczas gdy ich ramiona śledzą pożądane ruchy stawów, nawet poddane zaburzeniom zmieniającym się w czasie. Gdy trajektoria formacji koliduje z unikaniem przeszkód, regulator automatycznie priorytetyzuje bezpieczeństwo, omija przeszkodę, a następnie płynnie przywraca pożądaną formację. W porównaniu z wcześniejszymi regulatorami «w skończonym czasie» i klasycznymi regulatorami formacji, nowe podejście Fixed-FBC skraca czas ustalania się nawet o około trzy czwarte w niektórych fazach, co oznacza, że roboty osiągają stabilne, skoordynowane zachowanie znacznie szybciej, nie tracąc przy tym bezpieczeństwa ani odporności.
Wnioski dla zespołów robotów w świecie rzeczywistym
Dla czytelnika niebędącego specjalistą kluczowa idea jest taka, że praca ta daje zespołom wielorobotowym coś w rodzaju zdyscyplinowanego, szybko działającego «odruchu grupowego». Zamiast powoli dopasowywać się do właściwej konfiguracji, roboty mają matematycznie zagwarantowane osiągnięcie bezpiecznych formacji i poprawnych ruchów ramion w ustalonym czasie, nawet gdy są zderzane, obciążone niepewnymi ładunkami lub zmuszone do omijania przeszkód. Poprzez zjednoczenie utrzymania formacji, unikania przeszkód i sterowania ramionami w jednym frameworku, który respektuje rzeczywisty sposób poruszania się robotów kołowych, metoda ta przybliża zsynchronizowane stada robotów w fabrykach, magazynach i akcjach ratunkowych do niezawodnego zastosowania w praktyce.
Cytowanie: Xue, W., Lu, W., Zhang, X. et al. Fixed-time formation behavior control for unmanned ground vehicle-manipulators. Sci Rep 16, 10703 (2026). https://doi.org/10.1038/s41598-026-43223-2
Słowa kluczowe: koordynacja wielorobotowa, mobilne manipulatora, sterowanie formacją, unikanie przeszkód, sterowanie w stałym czasie