Clear Sky Science · ar
التحكم في سلوك التشكّل بزمن ثابت لمركبات أرضية غير مأهولة ذات ذراع آلية
روبوتات تتحرك وتعمل معًا
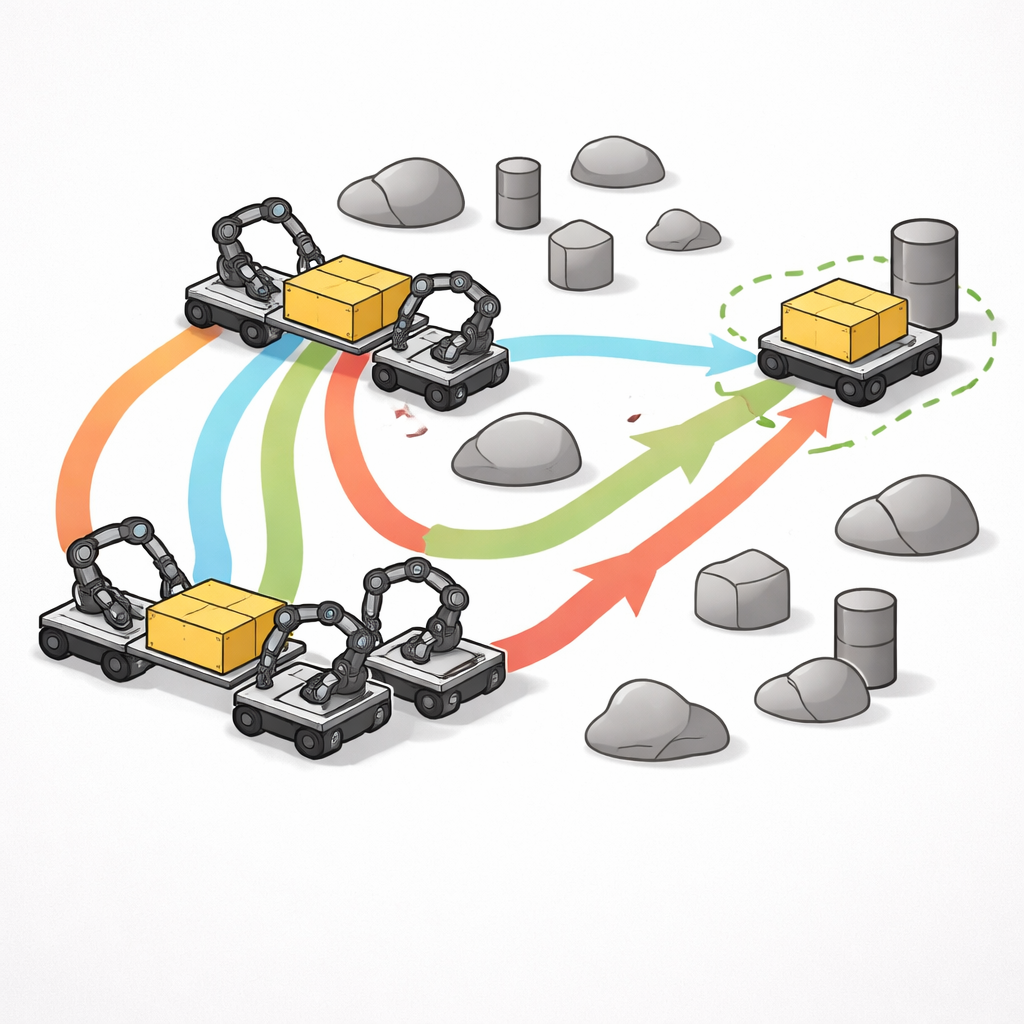
تخيّل فريقًا من الروبوتات المتنقلة الصغيرة، كلٌّ منها مزود بذراع آلية، تنقل حملاً مشتركًا عبر مستودع مزدحم أو موقع كارثة. يجب أن تحافظ على التشكّل، تتجنّب العقبات، وتحافظ على قبضة ثابتة على الجسم، وكل ذلك بينما تحاول الاضطرابات مثل الصدمات والاحتكاك أو تغيّر الحمولة إزعاجها. تعرض هذه الورقة طريقة تحكم جديدة تتيح لمثل هذه الفرق الروبوتية تنسيق هذه المطالب المتعارضة والوصول إلى أهدافها بشكل موثوق ضمن زمن مضمون وقصير.
لماذا العمل الجماعي صعب للروبوتات الأرضية
تجميع المركبة الأرضية غير المأهولة مع ذراع آلية (UGVM) قاعدة عجلات مع ذراع روبوتية، فيمكنها الحركة والتعامل مع الأشياء. هذا يجعلها مناسبة لمهام مثل مناولة المواد، التجميع التعاوني، والبحث والإنقاذ. لكن تنسيق عدة آلات من هذا النوع في آن واحد معقد. عجلاتها لا يمكن أن تنزلق جانبياً، مما يقيّد حركتها. في المقابل، تدرِّج الأذرع قوىً وحركات معقدة، ويضيف المحيط اضطرابات مثل أرض غير مستوية أو حمولات غير معروفة. عندما يحمل عدد من UGVMs جسمًا واحدًا، عليهم الحفاظ على تشكّل مستقر وتفادي العقبات وتحريك أذرعهم بشكل صحيح—وهي ثلاثة أهداف غالبًا ما تتعارض مع بعضها.
قيود طرق التحكم الحالية
تناولت الأبحاث السابقة أجزاءً من هذا اللغز لكن نادرًا ما جمعتها كلها معًا. الطرق القائمة على السلوك تمزج إجراءات أساسية مثل «الذهاب إلى الهدف» و«تجنّب العقبة»، لكنها غالبًا تفتقر إلى ضمانات صارمة بأن الفريق سيبقى مستقرًا. طرق التوافق (Consensus) تتيح للروبوتات الاتفاق على حركة مشتركة عبر الاتصالات، لكنها عادة تركز على هدف واحد ولا تقدم وسيلة منهجية لترتيب أولويات المهمات المتعارضة. استراتيجيات متقدمة أخرى، مثل التحكم التنبؤي النموذجي ودوال حاجز السلامة، يمكن أن توفر ضمانات قوية للسلامة لكنها بتكلفة حسابية عالية، ما يشكّل مشكلة للأنظمة المتعددة الروبوتات في الزمن الحقيقي. كثير من هذه الأساليب تفترض أيضًا روبوتات يمكنها الحركة بحرية في أي اتجاه، متجاهلة قيود العجلات غير المنزلقة التي تواجه UGVMs الحقيقية، ومعظمها يضمن فقط أن الأخطاء تتقلّص تدريجيًا بدلًا من أن تكون ضمن حد زمني معروف.
خطة ذات طبقتين للتنسيق السريع والموثوق
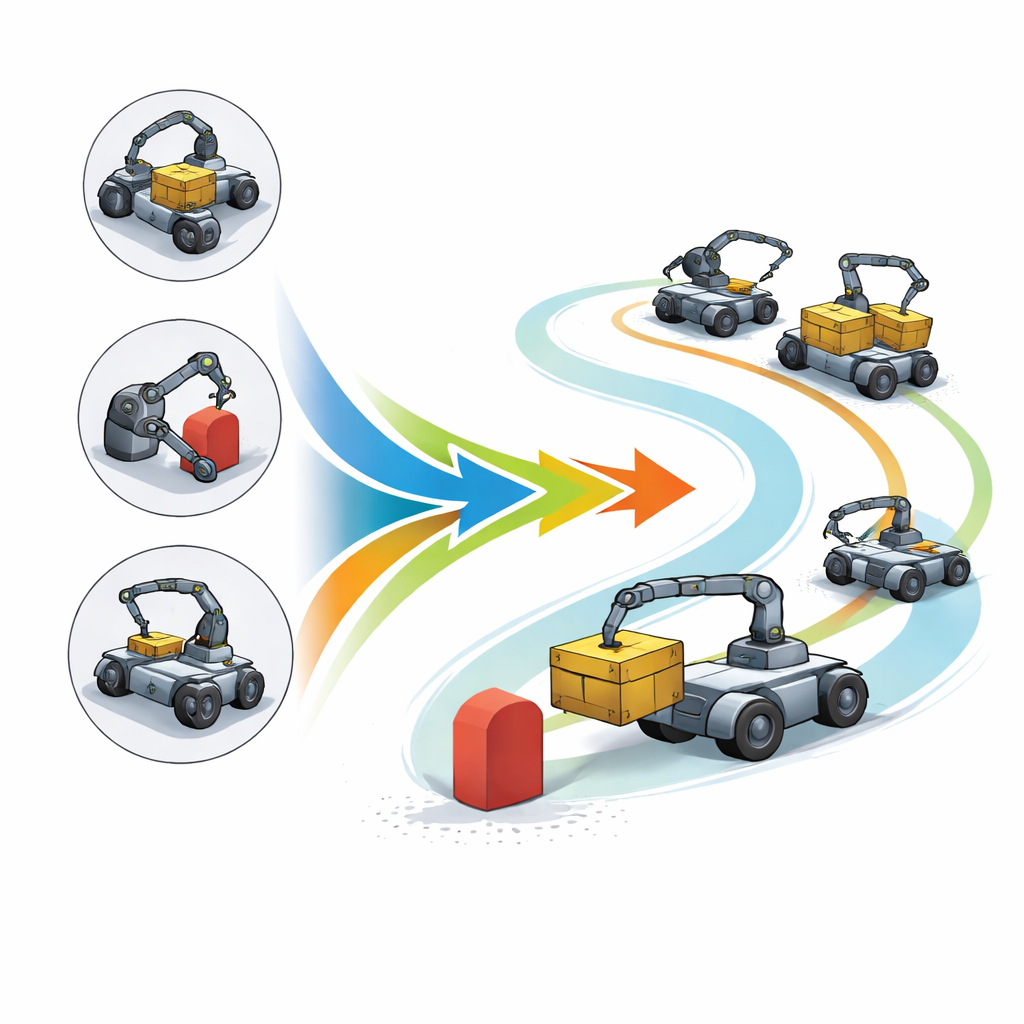
يقترح المؤلفون طريقة تحكم سلوكي في التشكّل بزمن ثابت بطبقتين (Fixed-FBC) توحّد تنسيق الروبوتات المتعددين، قيود العجلات غير المنزلقة، والصلابة أمام الاضطرابات. على طبقة تخطيط الحركة (الحركية)، يوسّعون إطارًا رياضيًا يُدعى التحكم السلوكي المعتمد على فضاء النواة (null-space-based behavioral control) بحيث يحترم حدود حركة العجلات ويتعامل مباشرة مع الارتباط بين اتجاه المركبة وموقعها. داخل هذا الإطار، يصممون ثلاثة سلوكيات أساسية: الحفاظ على تشكيل المجموعة، تجنّب العقبات كمجموعة، والتحكم في حركة ذراع كل روبوت. تُرصّ هذه السلوكيات حسب الأولوية—تجنّب العقبات فوق الحفاظ على التشكّل، وكلاهما فوق حركة الذراع—وتُسقَط الإجراءات ذات الأولوية الأقل في «مساحة الحركة المتبقية» للسلوكيات الأعلى أولوية. استراتيجية استقرار بزمن ثابت تشكّل كيفية تصحيح الأخطاء، مضمونة أن جميع أخطاء المهام تتقلّص إلى قيم صغيرة ضمن حد زمني لا يعتمد على مدى كبر الأخطاء عند البداية.
تحكم قوي ضد الاضطرابات وعدم التيقن
حالما تنتج طبقة تخطيط الحركة سرعة مرغوبة لكل UGVM، تضمن طبقة ديناميكية ثانية أن المحركات والمفاصل الفعلية تتبع هذا المخطط رغم معلمات الروبوت غير المؤكدة والاضطرابات الخارجية. هنا، يصمم المؤلفون متتبِّع تحكّم تعاوُضي بزمن ثابت. قوانين تكيفية تُقدّر باستمرار خواص غير معروفة مثل الكتلة ومصطلحات الاحتكاك، بينما مكوّن نمط الانزلاق (sliding-mode) يعمل على رفض الاضطرابات الخارجية. بدمج هذه العناصر، يدفع المتحكّم التباين بين السرعات المطلوبة والفعلية إلى جوار صغير حول الصفر ضمن زمن ثابت مضمون. التحليل النظري باستخدام طرق لياپونوف يُظهر أن كلًا من أخطاء مستوى المهمة (التشكّل، مسافة الأمان من العقبات، وضعيات الذراع) وأخطاء التتبّع تتقارب بسرعة وبشكل متوقّع.
ما تكشفه المحاكاة عن الأداء
تُظهر المحاكاة الحاسوبية الطريقة على فريق مكوّن من أربعة UGVMs ينقلون جسمًا عبر بيئات بها عقبات دائرية ثابتة. تنجح الروبوتات في الحفاظ على تشكيلها والحفاظ على مسافة آمنة من العقبات بينما تتتبّع أذرعها حركات المفاصل المطلوبة، حتى تحت اضطرابات متغيرة زمنياً. عندما يتعارض مسار التشكّل مع تجنّب العقبة، يعطي المتحكّم تلقائيًا الأولوية للسلامة، يلتف حول العقبة، ثم يعيد بسلاسة التشكّل المطلوب. مقارنة بمتحكّمات التشكّل «ذات الزمن المنتهي» الكلاسيكية والسابقة، يختصر نهج Fixed-FBC الجديد أوقات الاستقرار بما يصل في بعض المراحل إلى نحو ثلاثة أرباع، ما يعني أن الروبوتات تصل إلى سلوك منسق ومستقر أسرع بكثير دون التضحية بالسلامة أو الصلابة.
خلاصة لفرق الروبوتات في العالم الحقيقي
للقارئ العام، الفكرة الأساسية أن هذا العمل يمنح فرق الروبوتات المتعددة نوعًا من «الارتداد الجماعي» المنضبط والسريع. بدلًا من الانجراف ببطء نحو التشكّل الصحيح، تُضمن رياضيًا استعادة الروبوتات لتشكيلات آمنة وحركات ذراع صحيحة ضمن زمن محدد مسبقًا، حتى عند التعرض للصدمات أو حمل حمولات غير مؤكدة أو الاضطرار إلى التجاوز حول العقبات. من خلال توحيد الحفاظ على التشكّل، تجنّب العقبات، والتحكم في الذراع ضمن إطار يحترم الطريقة الحقيقية لحركة الروبوتات ذات العجلات، يقرب هذا الأسلوب أسراب الروبوتات المنسقة في المصانع والمستودعات ومهمات الإنقاذ خطوة نحو نشر عملي وموثوق في العالم الحقيقي.
الاستشهاد: Xue, W., Lu, W., Zhang, X. et al. Fixed-time formation behavior control for unmanned ground vehicle-manipulators. Sci Rep 16, 10703 (2026). https://doi.org/10.1038/s41598-026-43223-2
الكلمات المفتاحية: تنسيق متعدد الروبوتات, مناولات متحركة, التحكم في التشكّل, تجنّب العقبات, التحكم بزمن ثابت