Clear Sky Science · ru
Контроль образующейся модели поведения с фиксированным временем для наземных роботах‑манипуляторов без экипажа
Роботы, которые движутся и работают вместе
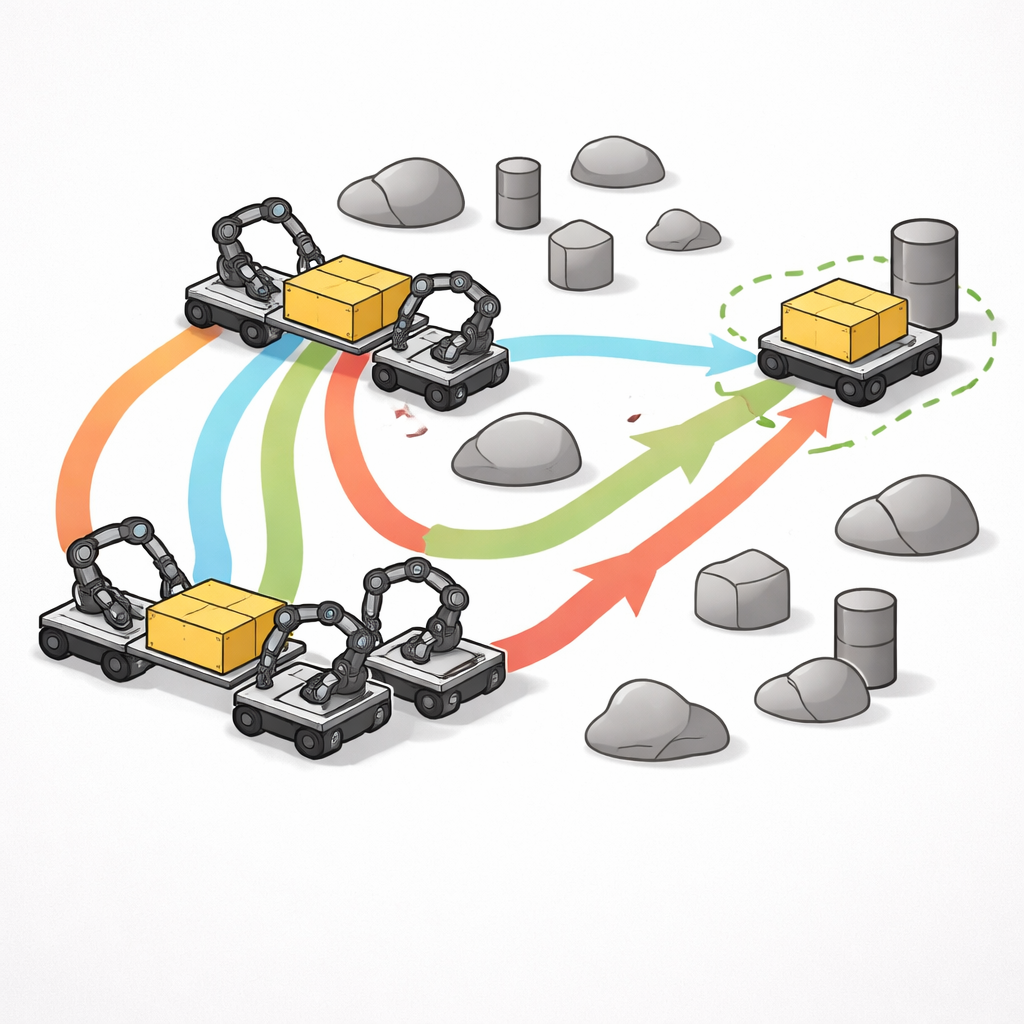
Представьте команду небольших мобильных роботов, каждый с собственным манипулятором, несущих общий груз через захламлённый склад или зону бедствия. Им нужно сохранять строй, объезжать препятствия и надёжно держать объект, в то время как удары, трение или смещение полезной нагрузки пытаются вывести их из строя. В этой статье представлен новый метод управления, позволяющий таким командам роботов согласовывать эти противоречивые требования и достигать целей надёжно в гарантированно короткий промежуток времени.
Почему командная работа сложна для наземных роботов
Наземные роботизированные платформы с манипуляторами (UGVM) объединяют колёсную базу и роботизированную руку, поэтому они могут и перемещаться, и манипулировать объектами. Это делает их привлекательными для задач вроде обработки материалов, кооперативной сборки и поиска‑и‑спасения. Но координировать несколько таких машин одновременно непросто. Их колёса не могут скользить вбок, что ограничивает допустимые способы передвижения. В то же время манипуляторы вносят сложные силы и движения, а окружение добавляет возмущения, такие как неровная поверхность или неизвестная полезная нагрузка. Когда несколько UGVM несут один объект, им необходимо сохранять устойчивую формацию, объезжать препятствия и правильно управлять руками — три цели, которые часто конфликтуют друг с другом.
Ограничения существующих подходов к управлению
Ранее исследования решали части этой задачи, но редко — всё сразу. Поведенческие методы комбинируют базовые действия вроде «двигаться к цели» и «избегать препятствий», но им часто не хватает строгих гарантий стабильности группы. Методы на основе консенсуса позволяют роботам согласовывать общие движения через связь, но обычно сосредоточены на одной задаче и не дают системного способа приоритизации конфликтующих целей. Более продвинутые стратегии, такие как модельно‑предсказательное управление и функции безопасности (safety barrier functions), могут обеспечивать сильные гарантии безопасности, но требуют больших вычислительных ресурсов, что проблематично для многороботных систем в реальном времени. Многие из этих методов также предполагают роботов, способных двигаться в любом направлении, игнорируя ограничение на скольжение колёс, с которыми сталкиваются реальные UGVM, и большинство обеспечивает лишь постепенное уменьшение ошибок, а не достижение их в установленный временной интервал.
Двухуровневый план для быстрого и надёжного взаимодействия
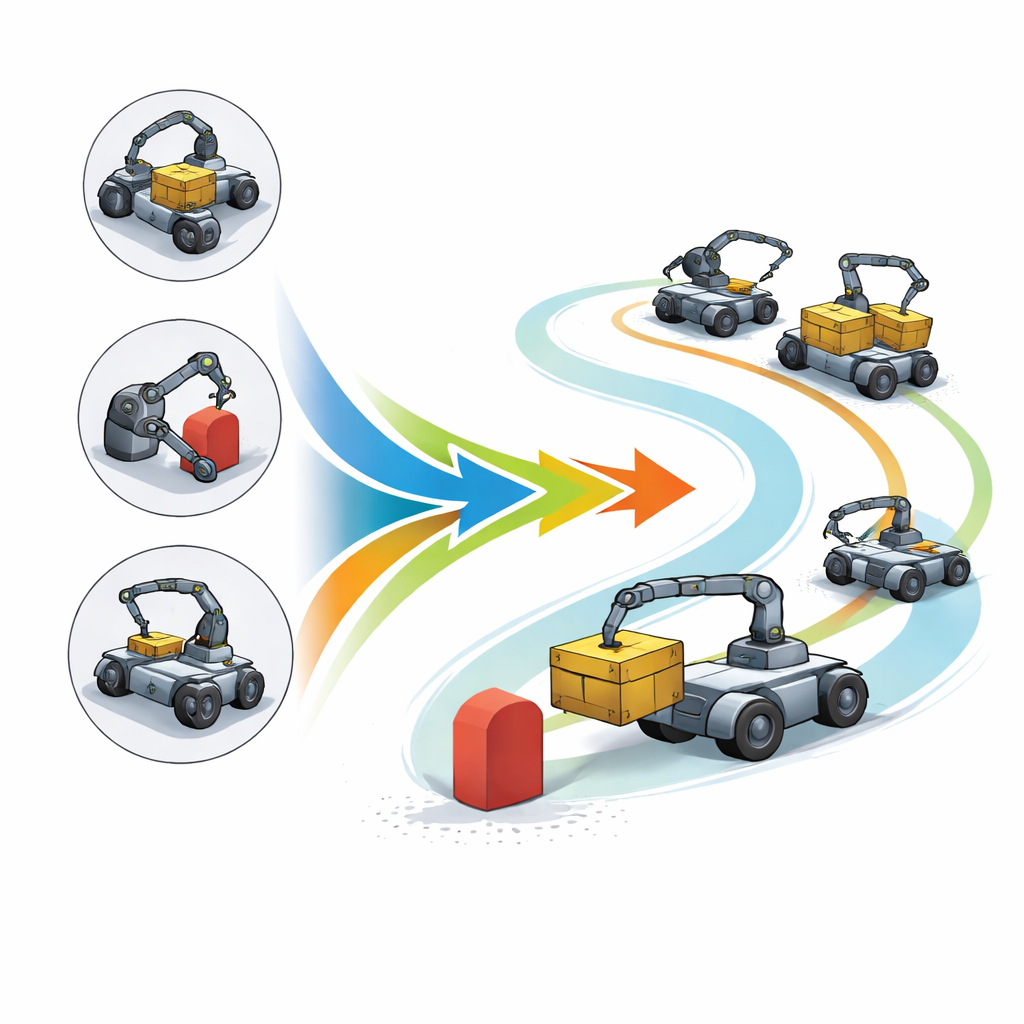
Авторы предлагают двухслойный метод управления формированием поведения с фиксированным временем (Fixed‑FBC), который объединяет координацию многороботной группы, ограничения несоскальзывания колёс и устойчивость к возмущениям. На уровне планирования движения (кинематическом слое) они расширяют математическую структуру, называемую управлением на основе нулевого пространства поведенческих приоритетов, так чтобы она учитывала ограничения колёсного движения и напрямую учитывала связь между направлением корпуса и положением. В рамках этой структуры разработаны три базовых поведения: поддержание формации, избегание препятствий как формацией и управление движениями каждого манипулятора. Эти поведения выстроены в порядке приоритетов — избегание препятствий выше поддержания формации, а обе выше управления рукой — и действия более низкого приоритета проецируются в «остаточное» пространство движений, оставшееся после учёта действий более высокого приоритета. Стратегия фиксированной стабильности по времени задаёт, как корректируются ошибки, гарантируя, что все ошибки по задачам уменьшаются до малых значений в пределах временного предела, который не зависит от величины начальных ошибок.
Устойчивое управление против возмущений и неопределённостей
Когда кинематический слой формирует желаемую скорость для каждого UGVM, второй, динамический слой обеспечивает, чтобы реальные моторы и сочленения следовали этому плану несмотря на неизвестные параметры робота и внешние возмущения. Здесь авторы разрабатывают адаптивный регулятор слежения с фиксированным временем. Адаптивные законы непрерывно оценивают неизвестные величины, такие как масса и коэффициенты трения, в то время как компонент срывного режима (sliding‑mode) помогает отвергать внешние помехи. Комбинируя эти элементы, регулятор сводит несоответствие между желаемой и фактической скоростью к малой окрестности нуля в гарантированный фиксированный срок. Теоретический анализ с использованием методов Ляпунова показывает, что и ошибки уровня задач (формация, расстояние до препятствий, положения суставов), и ошибки слежения сходятся быстро и предсказуемо.
Что показывают симуляции о производительности
Компьютерные симуляции демонстрируют метод на команде из четырёх UGVM, транспортирующих объект через окружение со статическими круговыми препятствиями. Роботы успешно сохраняют формацию и держат безопасную дистанцию от препятствий, в то же время их манипуляторы отслеживают требуемые движения сочленений, даже при воздействии временно меняющихся возмущений. Когда путь формации конфликтует с требованием объехать препятствие, регулятор автоматически отдаёт приоритет безопасности, объезжает препятствие и затем плавно восстанавливает требуемую формацию. По сравнению с ранними «финит‑временными» и классическими контроллерами формации, новый подход Fixed‑FBC в некоторых фазах сокращает время установления до примерно трёх четвертей, то есть роботы достигают стабильного согласованного поведения значительно быстрее без потери безопасности или устойчивости.
Вывод для реальных команд роботов
Для неспециалиста ключевая идея состоит в том, что работа даёт многороботным командам своего рода дисциплинированный, быстро действующий «групповой рефлекс». Вместо того чтобы медленно устремляться к правильной конфигурации, роботы математически гарантированно устанавливаются в безопасные формации и корректные движения манипуляторов в заданный срок, даже при ударах, неопределённой полезной нагрузке или необходимости огибать препятствия. Объединяя поддержание формации, избегание препятствий и управление руками в едином каркасе, который учитывает реальные способы передвижения колёсных роботов, этот метод приближает скоординированные рои роботов на заводах, складах и в спасательных миссиях к надёжному полевому применению.
Цитирование: Xue, W., Lu, W., Zhang, X. et al. Fixed-time formation behavior control for unmanned ground vehicle-manipulators. Sci Rep 16, 10703 (2026). https://doi.org/10.1038/s41598-026-43223-2
Ключевые слова: координация многороботных систем, мобильные манипуляторы, контроль строя, избегание препятствий, контроль с фиксированным временем