Clear Sky Science · zh
用于嘈杂且形态复杂环境的实时路面裂缝检测框架
保持道路健康为何重要
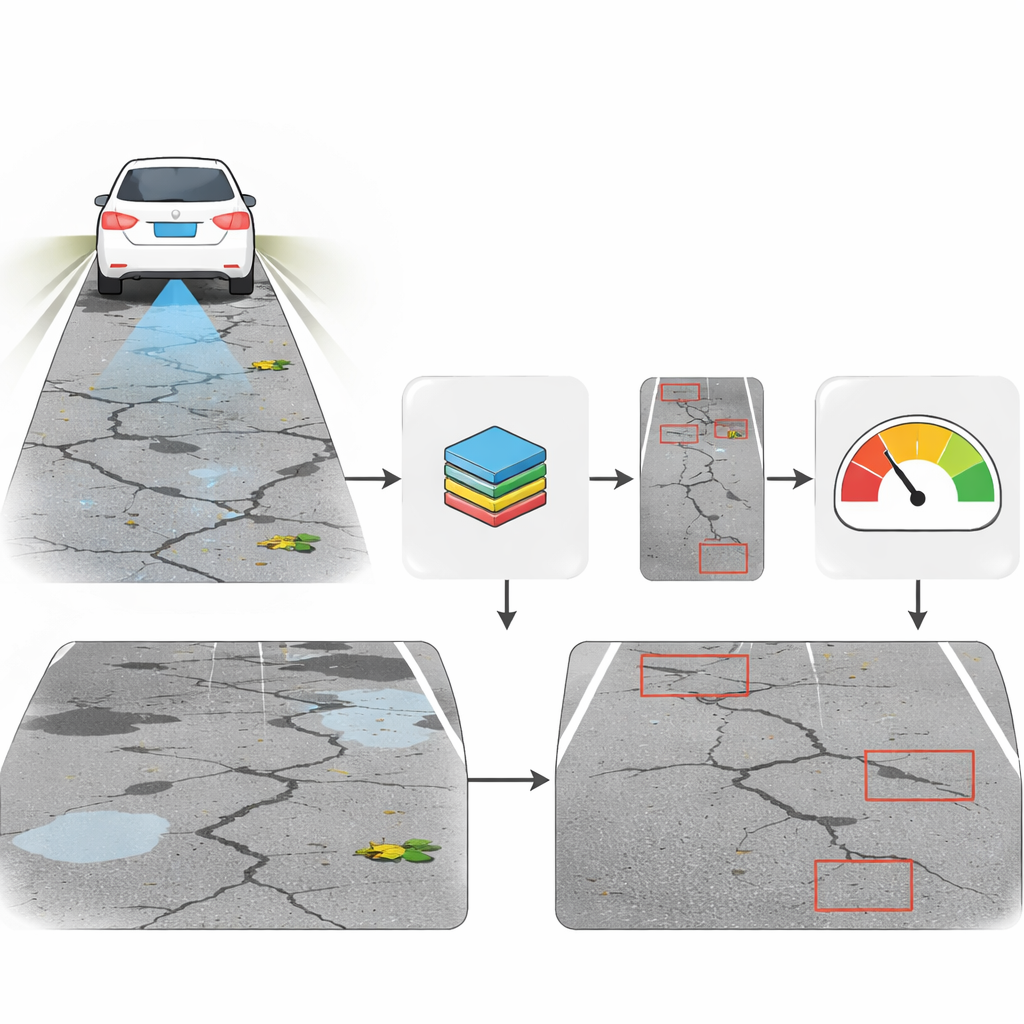
路面裂缝不仅仅是令人烦恼的小问题。当路面中的微小裂缝未被及时发现时,它们可能扩展为深沟和坑洞,损坏车辆、延缓运输并增加事故风险。公路管理机构希望使用安装在检测车辆上的摄像头及早发现这些问题,但现有的计算机视觉工具常常遗漏细微裂缝,或被阴影、积水和污渍等干扰误导。本文提出了一种新的人工智能模型,称为 Crack-YOLO,能够在复杂的真实环境中快速且准确地发现路面损伤,并将检测结果直接转换为标准的路面健康评分。
在真实世界中识别裂缝,而不仅仅是在实验室里
许多现有的裂缝检测器在干净的测试图像上表现良好,但在实际街道上性能下降,那里有车灯、树影、雨水、油迹和落叶等杂乱背景。细小的毛细裂缝尤其难以识别:其特征微弱、常常断断续续,并且容易被无害的表面纹理误判。作者将此归纳为三类相关挑战:准确率低、对背景杂乱高度敏感,以及对极小裂缝检测能力不足。解决这些问题对现代路面管理系统至关重要,因为这些系统依赖准确的损伤地图来决策何时何地进行维修。
更轻、更精的数字之眼
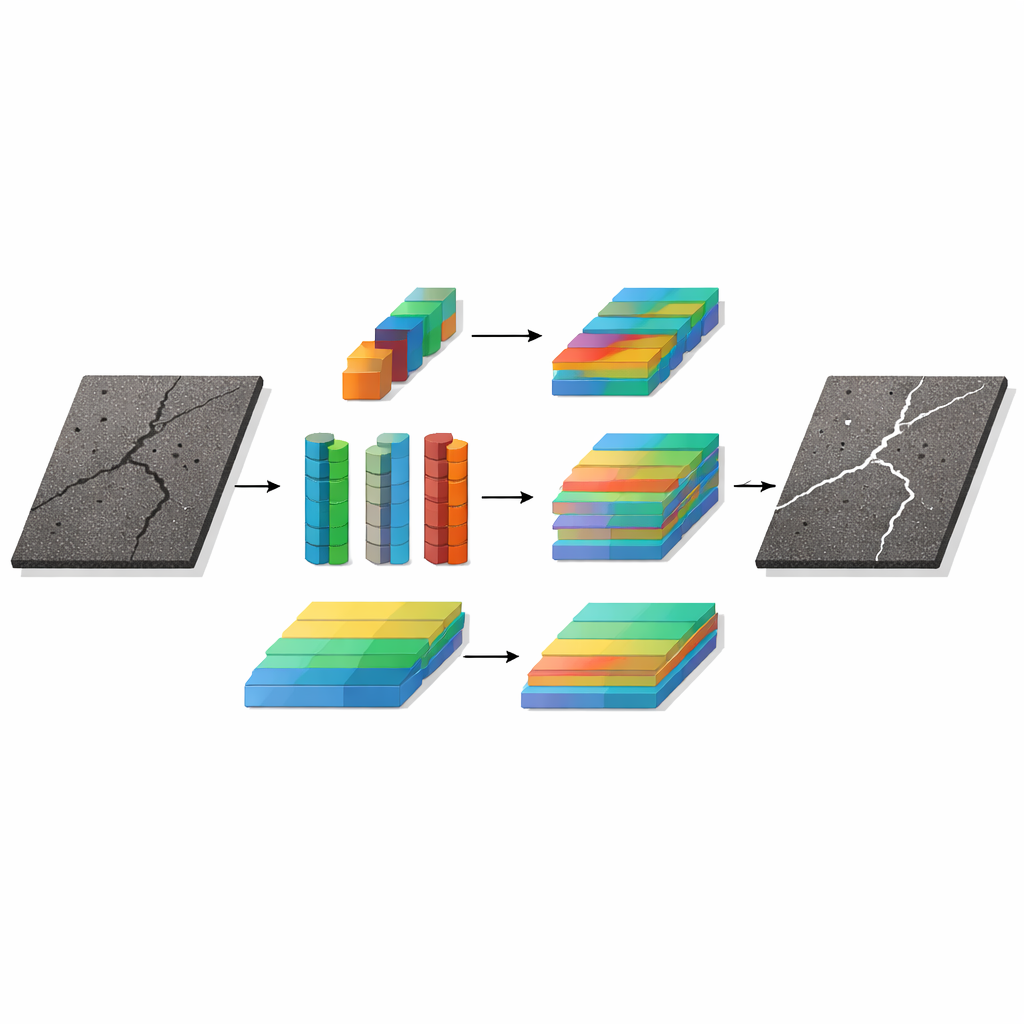
Crack-YOLO 基于一个流行的目标检测系列 YOLO,但在关键部件上进行了重新设计,使系统在保持轻量化以适配小型计算设备的同时能“看”得更聪明。首先,模型用于分析图像的基本构建单元被升级为一种上下文引导单元。该单元不仅关注局部小块,还融合了来自邻域和更广阔场景的信息。这样,模型可以将裂缝视为相对于整体路面连续的线条,从而降低将暗色污渍或阴影误判为损伤的可能性。
跨尺度跟踪细微线条
裂缝形态多样,从长直线到分支的“鳄鱼裂纹”再到圆形坑洞。为适应这种多样性,作者在特征融合模块中用可随输入变化的动态滤波器替代了固定滤波器。实际做法是模型保留一小组备选滤波器,并学会在运行时如何混合它们,这有助于在不增加大量计算的情况下同时捕捉细长弯曲的裂缝和较大的破损区域。除此之外,一个新的输出头允许网络在图像的每个位置融合来自细节层和大尺度层的信息。这种多尺度融合有助于模型描绘跨越大范围的裂缝,同时仍关注尖锐边缘。
在复杂路况上验证性能
团队在来自不同国家、不同摄像头和不同天气条件的四个裂缝图像集上测试了 Crack-YOLO,其中包括作者自建的 CrackVariety 数据集,该数据集刻意包含了阳光、雨水、阴影、积水、油渍和障碍物等情况。总体上,新模型在检测到更多真实裂缝的同时,运行速度也优于强基线模型 YOLOv8s。在 CrackVariety 上,其检测质量的主要评分从约 40% 提升到超过 71%,而在高端显卡上处理速度几乎翻倍,超过每秒 400 帧。在一个噪声大且分辨率低的数据集上,它也能发现许多其他基于 YOLO 的模型未能识别的有用模式。与 SSD、Faster R-CNN 等经典检测器相比,它在准确性与速度之间表现出更稳定的平衡。
从摄像帧到维护决策
为证明该方法不仅是实验室练习,作者将 Crack-YOLO 部署在 Raspberry Pi 5 上——这是一种廉价、信用卡大小的计算机,类似于可能安装在小型检测车辆上的设备。即便没有硬件加速,模型也能分析每秒数帧,足以应对慢速巡检车辆或对关键帧进行抽样。系统更进一步,将其检测结果与全球通用的路面状况指数(Pavement Condition Index)相连接:它根据摄像头几何估算每个裂缝的实际面积,修正由于边界框导致的高估,并将结果代入既定工程公式,从而为每个路段输出单一的健康评分。
更智能的检查,更平顺的行驶
总体而言,该工作表明可以构建出既快速又智能的路面裂缝检测器:Crack-YOLO 能处理杂乱、低质量的图像,跟踪多种缺陷类型,并能在有限硬件上运行。通过将检测结果直接输送到标准路面评分体系,它有助于缩小人工智能研究与日常道路维护之间的差距。如果进一步精细化以达到像素级的检测并融合额外信息(如深度或红外数据),此类系统有望支撑高度自动化且低成本的道路网络监测——在问题演化为损害轮胎的坑洞之前捕捉到早期磨损迹象。
引用: Fan, L., Tang, S., Ariffin, M.K.A.B.M. et al. A real-time detection framework for road cracks in noisy and morphologically complex environments. Sci Rep 16, 10107 (2026). https://doi.org/10.1038/s41598-026-41043-y
关键词: 路面裂缝检测, 路面监测, 计算机视觉, 深度学习, 基础设施维护