Clear Sky Science · pt
Uma estrutura de detecção em tempo real para trincas em vias em ambientes ruidosos e morfologicamente complexos
Por que manter as estradas em bom estado importa
Trincas nas vias são mais do que um incômodo. Quando pequenas fissuras no pavimento passam despercebidas, podem evoluir para sulcos profundos e buracos que danificam veículos, atrasam entregas e aumentam o risco de acidentes. As agências rodoviárias gostariam de identificar esses problemas cedo usando câmeras montadas em veículos de inspeção, mas as ferramentas de visão computacional atuais costumam perder trincas tênues ou confundir-se com sombras, poças e manchas. Este artigo apresenta um novo modelo de inteligência artificial, chamado Crack-YOLO, que pode localizar danos no pavimento de forma rápida e precisa mesmo em condições reais e desordenadas, e converter essas detecções diretamente em pontuações padrão de saúde do pavimento.
Ver trincas no mundo real, não apenas no laboratório
Muitos detectores de trincas existentes funcionam bem em imagens de teste limpas, mas falham nas ruas de verdade, onde faróis, sombras de árvores, água da chuva, manchas de óleo e folhas caídas tornam a cena confusa. Trincas finas e capilares são especialmente difíceis de reconhecer: suas características são fracas, frequentemente desaparecem e reaparecem, e podem ser facilmente confundidas com padrões superficiais inofensivos. Os autores enquadram isso em três desafios interligados: baixa acurácia, forte sensibilidade ao ruído de fundo e fraca detecção de trincas muito pequenas. Resolver essas questões é crucial para os modernos Sistemas de Gestão de Pavimentos, que dependem de mapas precisos de danos para decidir quando e onde reparar.
Um olhar digital mais leve e mais afiado
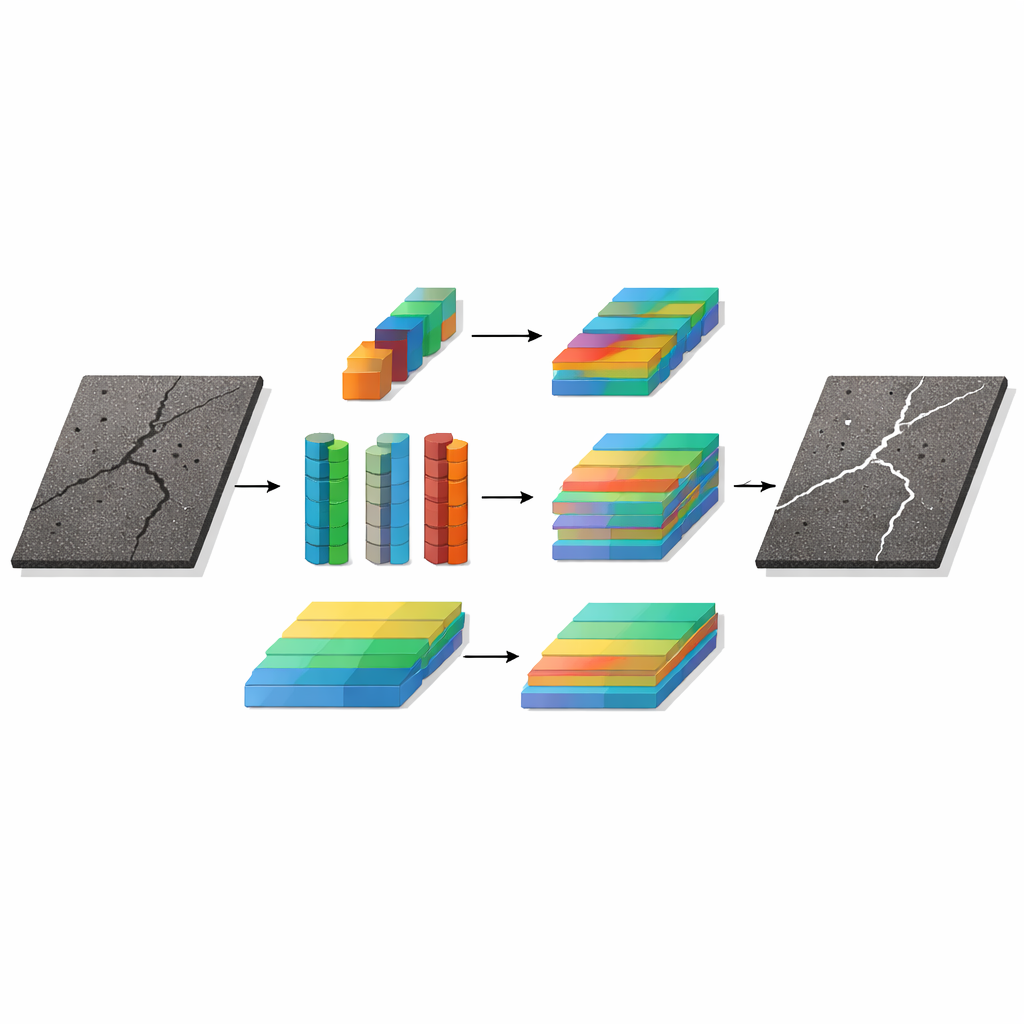
Crack-YOLO se baseia em uma família popular de detecção de objetos conhecida como YOLO, mas redesenha partes-chave para que o sistema possa "ver" de forma mais inteligente mantendo-se leve o suficiente para computadores modestos. Primeiro, o bloco básico do modelo para analisar imagens é aprimorado para uma unidade guiada por contexto. Em vez de focar apenas em pequenos patches locais, essa unidade mistura informações do entorno imediato e da cena mais ampla. Isso permite que o modelo enxergue uma trinca como uma linha contínua sobre a superfície geral da via, reduzindo a probabilidade de confundir manchas escuras ou sombras com danos.
Seguindo linhas finas através das escalas
Trincas apresentam muitas formas e tamanhos, desde linhas longas e retas até padrões ramificados tipo "jacaré" e buracos arredondados. Para se adaptar a essa variedade, os autores substituem filtros fixos dentro de um módulo de fusão de características por filtros dinâmicos que podem mudar dependendo da entrada. Na prática, o modelo mantém um pequeno conjunto de filtros alternativos e aprende a combiná-los em tempo real, o que o ajuda a capturar tanto trincas finas e sinuosas quanto regiões maiores quebradas sem adicionar grande custo computacional. Além disso, uma nova cabeça de saída permite que a rede misture informações de camadas de alto detalhe e de camadas de visão global para cada localização na imagem. Essa fusão multiescala ajuda o sistema a traçar trincas que se estendem por grandes áreas enquanto ainda preserva atenção aos contornos nítidos.
Comprovando desempenho em cenas rodoviárias difíceis
A equipe testa o Crack-YOLO em quatro conjuntos de imagens de trincas de diferentes países, câmeras e condições meteorológicas, incluindo seu próprio conjunto CrackVariety, que deliberadamente inclui sol, chuva, sombras, água parada, manchas de óleo e obstáculos. No geral, o novo modelo detecta mais trincas verdadeiras enquanto opera mais rápido que uma referência forte, o YOLOv8s. No CrackVariety, sua métrica principal de qualidade de detecção pula de cerca de 40% para mais de 71%, enquanto a velocidade de processamento quase dobra, para mais de 400 imagens por segundo em uma placa gráfica de alto desempenho. Em um conjunto de baixa resolução particularmente ruidoso, ele encontra padrões úteis onde muitos outros modelos baseados em YOLO falham. Comparado com detectores clássicos como SSD e Faster R-CNN, oferece um equilíbrio mais estável entre acurácia e velocidade.
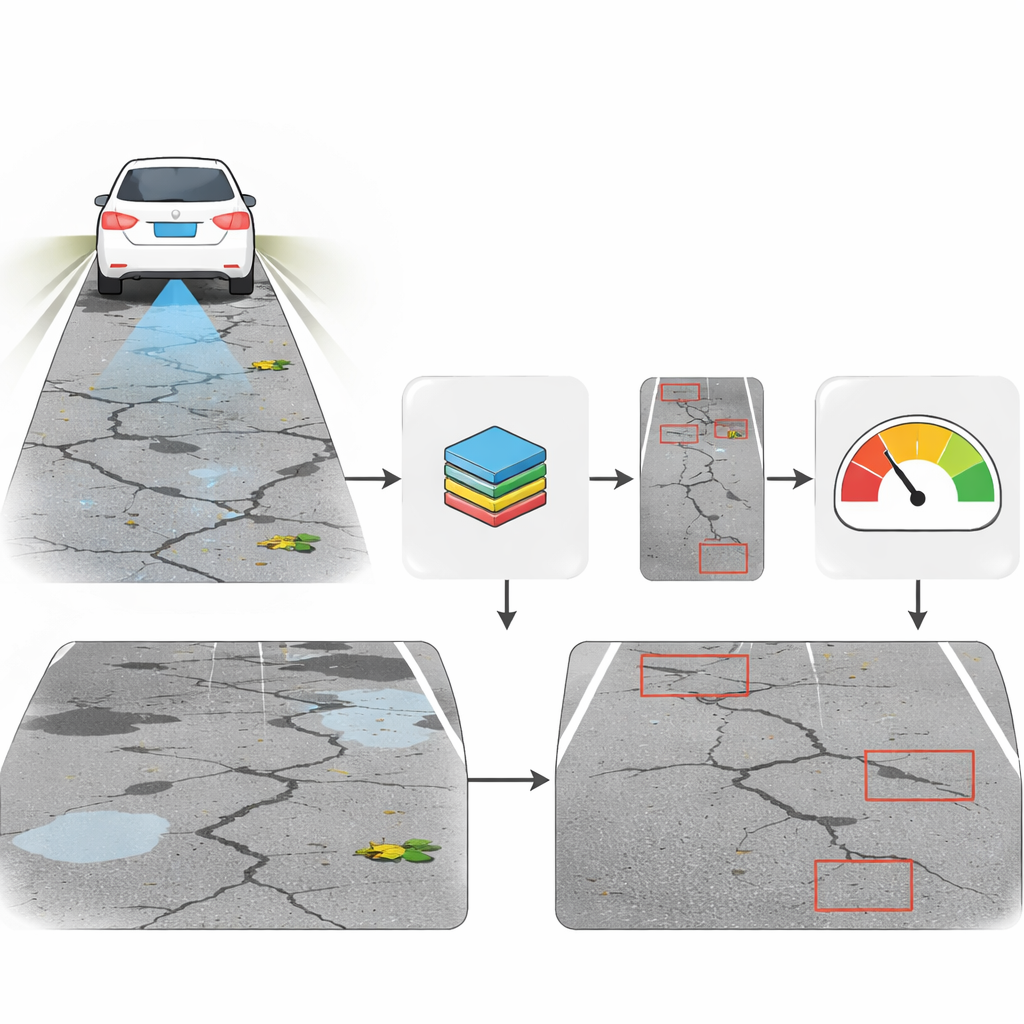
De quadros de câmera a decisões de manutenção
Para mostrar que a abordagem não é apenas um exercício de laboratório, os autores implantam o Crack-YOLO em um Raspberry Pi 5 — um computador barato, do tamanho de um cartão de crédito, semelhante ao que poderia ser montado em um pequeno veículo de inspeção. Mesmo sem aceleradores de hardware, o modelo pode analisar vários quadros de vídeo por segundo, velocidade suficiente para carros de levantamento em baixa velocidade ou para amostrar quadros-chave. O sistema avança conectando suas detecções ao Pavement Condition Index, um padrão usado mundialmente. Ele estima a área física de cada trinca a partir da geometria da câmera, corrige a superestimação causada por caixas delimitadoras e insere os resultados em fórmulas de engenharia estabelecidas para gerar uma única pontuação de condição para cada trecho de via.
Inspeções mais inteligentes, viagens mais suaves
No geral, o trabalho mostra que é possível construir um detector de trincas que seja ao mesmo tempo rápido e inteligente: o Crack-YOLO lida com imagens confusas e de baixa qualidade, rastreia muitos tipos de defeitos e roda em hardware modesto. Ao alimentar suas descobertas diretamente em classificações de pavimento padrão, ajuda a reduzir a lacuna entre a pesquisa em inteligência artificial e a manutenção rodoviária diária. Se refinado ainda mais para operar no nível de pixels individuais e para fundir informações extras como profundidade 3D ou infravermelho, sistemas como este poderiam apoiar monitoramento altamente automatizado e de baixo custo das redes viárias — detectando sinais iniciais de desgaste muito antes de se tornarem buracos que deformam rodas.
Citação: Fan, L., Tang, S., Ariffin, M.K.A.B.M. et al. A real-time detection framework for road cracks in noisy and morphologically complex environments. Sci Rep 16, 10107 (2026). https://doi.org/10.1038/s41598-026-41043-y
Palavras-chave: detecção de trincas em vias, monitoramento de pavimentos, visão computacional, aprendizado profundo, manutenção de infraestrutura