Clear Sky Science · it
Un framework di rilevamento in tempo reale per crepe stradali in ambienti rumorosi e morfologicamente complessi
Perché mantenere le strade sane è importante
Le strade screpolate sono più di un semplice fastidio. Quando piccole fratture nel manto stradale passano inosservate, possono evolvere in solchi profondi e buche che danneggiano i veicoli, rallentano le consegne e aumentano il rischio di incidenti. Le autorità stradali vorrebbero individuare questi problemi in fase iniziale usando telecamere montate su veicoli di ispezione, ma gli strumenti di visione artificiale attuali spesso non rilevano crepe appena accennate o vengono confusi da ombre, pozzanghere e macchie. Questo articolo presenta un nuovo modello di intelligenza artificiale, chiamato Crack-YOLO, capace di trovare danni stradali rapidamente e con precisione anche in condizioni reali disordinate, e di convertire direttamente tali rilevamenti in punteggi standard di condizione del manto.
Riconoscere le crepe nel mondo reale, non solo in laboratorio
Molti rilevatori di crepe esistenti funzionano bene su immagini di test ordinate ma vacillano sulle strade reali, dove fari, ombre di alberi, acqua piovana, macchie d’olio e foglie cadute intasano la scena. Le crepe sottili e capillari sono particolarmente difficili da riconoscere: le loro caratteristiche sono deboli, spesso scompaiono e riappaiono nell’inquadratura e possono essere facilmente scambiate per pattern superficiali innocui. Gli autori inquadrano questo problema come tre sfide collegate: bassa accuratezza, forte sensibilità al rumore di fondo e scarsa capacità di rilevare crepe molto piccole. Risolvere questi aspetti è cruciale per i moderni Sistemi di Gestione del Pavimento (Pavement Management Systems), che si basano su mappe accurate dei danni per decidere quando e dove intervenire con le riparazioni.
Un occhio digitale più leggero e più acuto
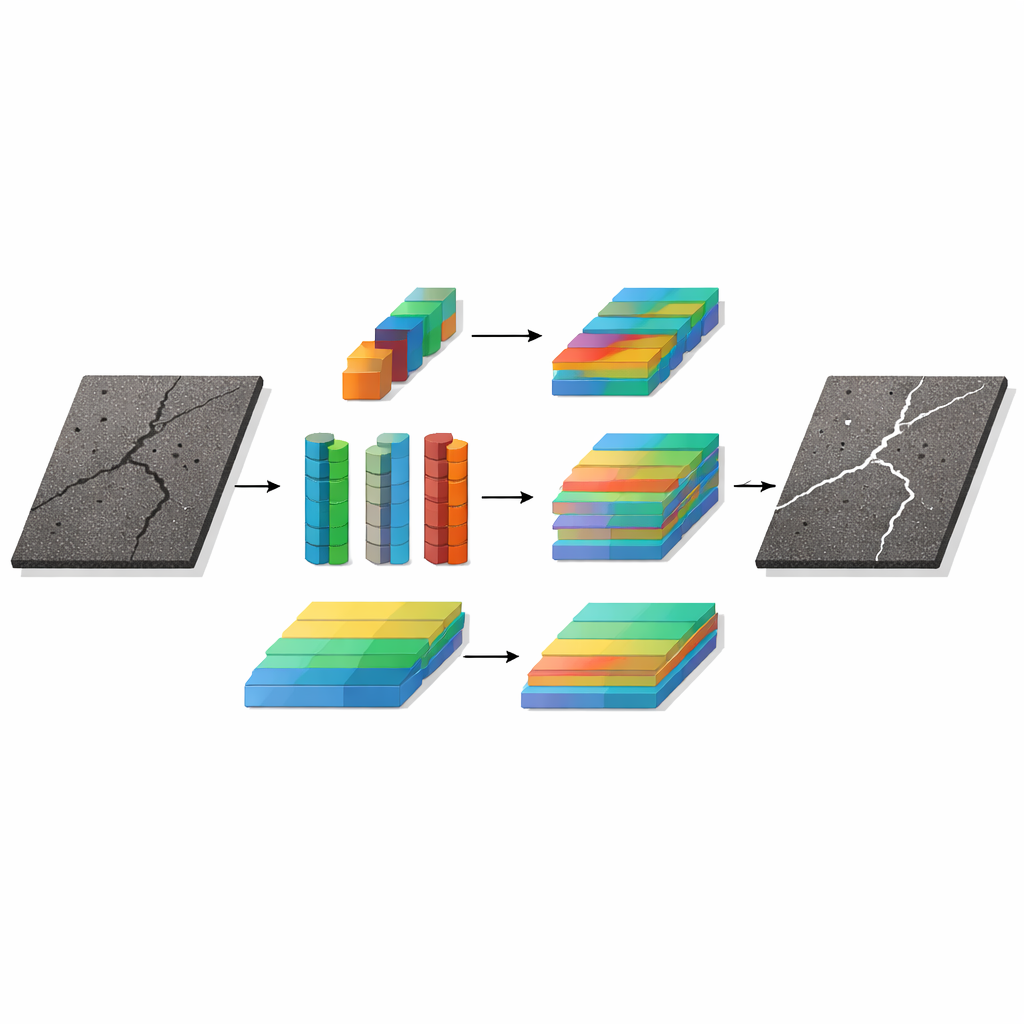
Crack-YOLO si basa su una popolare famiglia di rilevatori di oggetti nota come YOLO, ma riprogetta componenti chiave in modo che il sistema possa “guardare” in modo più intelligente restando abbastanza leggero per piccoli computer. Innanzitutto, il blocco di base del modello per l’analisi delle immagini viene aggiornato a un’unità guidata dal contesto. Invece di concentrarsi soltanto su piccole patch locali, quest’unità mescola informazioni dal vicinato immediato e dalla scena più ampia. Questo permette al modello di vedere una crepa come una linea continua sullo sfondo complessivo della strada, riducendo la probabilità di confondere macchie scure o ombre con danni reali.
Seguire linee sottili attraverso le scale
Le crepe assumono molte forme e dimensioni, da lunghe linee rette a motivi ramificati tipo «alligator» e buche circolari. Per adattarsi a questa varietà, gli autori sostituiscono filtri fissi all’interno di un modulo di fusione delle caratteristiche con filtri dinamici che possono cambiare in base all’input. In pratica, il modello mantiene un piccolo insieme di filtri alternativi e impara come combinarli al volo, il che lo aiuta a catturare sia crepe sottili e tortuose sia aree rotte più ampie senza aggiungere un carico computazionale pesante. Inoltre, una nuova testa di output permette alla rete di fondere informazioni da strati a dettaglio fine e da strati più grossolani a ampia scala per ogni posizione nell’immagine. Questa fusione multiscala aiuta il sistema a tracciare crepe che si estendono su aree vaste pur mantenendo attenzione sui bordi netti.
Dimostrare le prestazioni su scene stradali difficili
Il team testa Crack-YOLO su quattro collezioni di immagini di crepe provenienti da diversi paesi, telecamere e condizioni meteorologiche, incluso il proprio dataset CrackVariety che volutamente contiene sole, pioggia, ombre, acqua stagnante, macchie d’olio e ostacoli. In tutte le prove, il nuovo modello rileva più crepe reali mentre è più veloce di un solido baselines, YOLOv8s. Su CrackVariety, il suo punteggio principale per la qualità del rilevamento passa da circa il 40% a oltre il 71%, mentre la velocità di elaborazione quasi raddoppia a oltre 400 immagini al secondo su una scheda grafica di fascia alta. Su un dataset particolarmente rumoroso e a bassa risoluzione, individua pattern utili dove molti altri modelli basati su YOLO falliscono. Rispetto a rilevatori classici come SSD e Faster R-CNN, offre un equilibrio più stabile tra accuratezza e velocità.
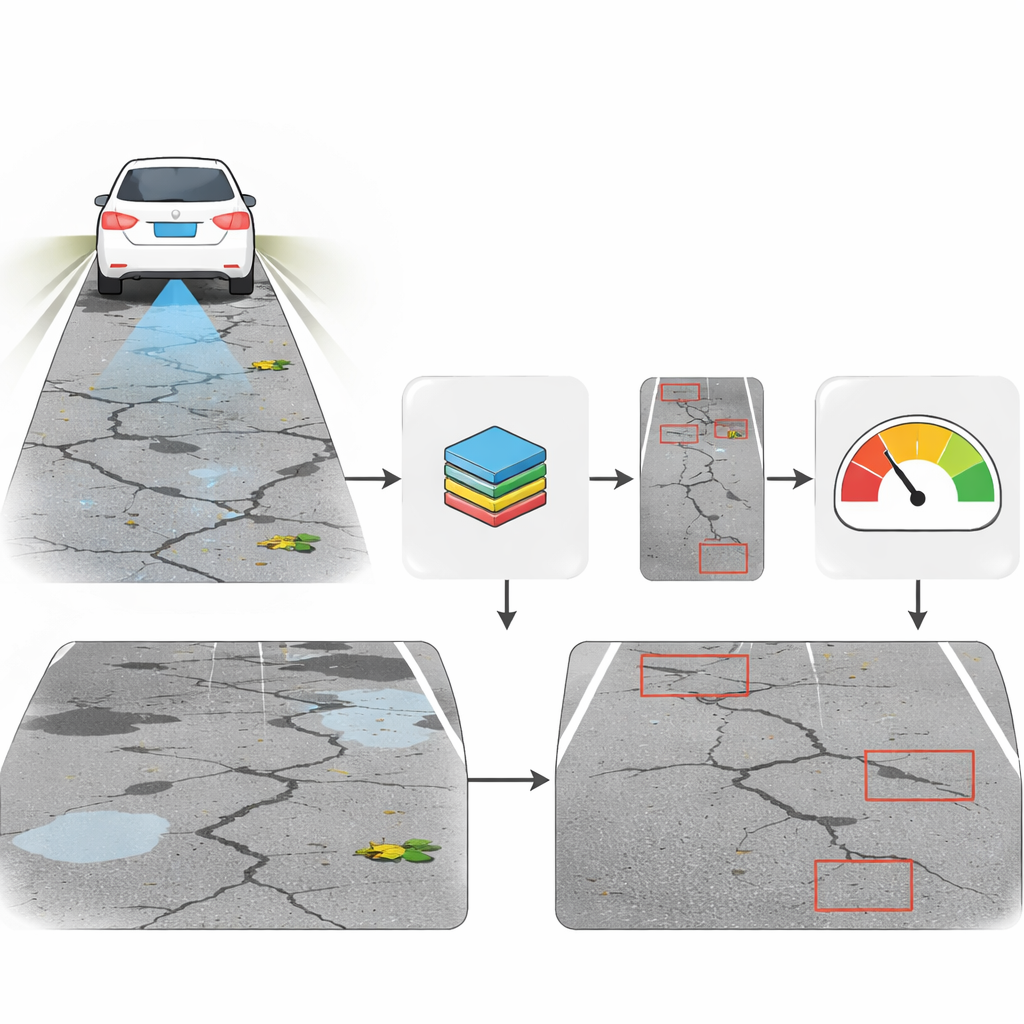
Dai fotogrammi della videocamera alle decisioni di manutenzione
Per mostrare che l’approccio non è solo un esercizio di laboratorio, gli autori implementano Crack-YOLO su un Raspberry Pi 5—un computer economico delle dimensioni di una carta di credito, simile a quanto potrebbe essere montato su un piccolo veicolo di ispezione. Anche senza acceleratori hardware, il modello può analizzare diversi frame video al secondo, abbastanza veloce per auto di rilevamento a bassa velocità o per campionare fotogrammi chiave. Il sistema compie un passo ulteriore collegando i suoi rilevamenti al Pavement Condition Index, uno standard usato a livello mondiale. Stima l’area fisica di ogni crepa a partire dalla geometria della camera, corregge la sovrastima dovuta alle bounding box e inserisce i risultati in formule ingegneristiche consolidate per produrre un unico punteggio di condizione per ogni tratto stradale.
Ispezioni più intelligenti, viaggi più fluidi
Complessivamente, il lavoro dimostra che è possibile costruire un rilevatore di crepe stradali sia rapido che intelligente: Crack-YOLO gestisce immagini confuse e di bassa qualità, traccia molti tipi di difetti ed è eseguibile su hardware modesto. Alimentando i suoi risultati direttamente nei sistemi di valutazione standard del manto, contribuisce a colmare il divario tra ricerca sull’intelligenza artificiale e manutenzione stradale quotidiana. Se ulteriormente perfezionati per operare a livello di singolo pixel e per fondere informazioni aggiuntive come profondità 3D o infrarosso, sistemi di questo tipo potrebbero sostenere monitoraggi altamente automatizzati e a basso costo delle reti stradali—catturando segnali precoci di degrado molto prima che si trasformino in buche capaci di danneggiare le ruote.
Citazione: Fan, L., Tang, S., Ariffin, M.K.A.B.M. et al. A real-time detection framework for road cracks in noisy and morphologically complex environments. Sci Rep 16, 10107 (2026). https://doi.org/10.1038/s41598-026-41043-y
Parole chiave: rilevamento crepe stradali, monitoraggio del pavimento stradale, visione artificiale, deep learning, manutenzione delle infrastrutture