Clear Sky Science · sv
En ram för realtidsdetektion av vägkrackor i brusiga och morfologiskt komplexa miljöer
Varför det är viktigt att hålla vägarna i gott skick
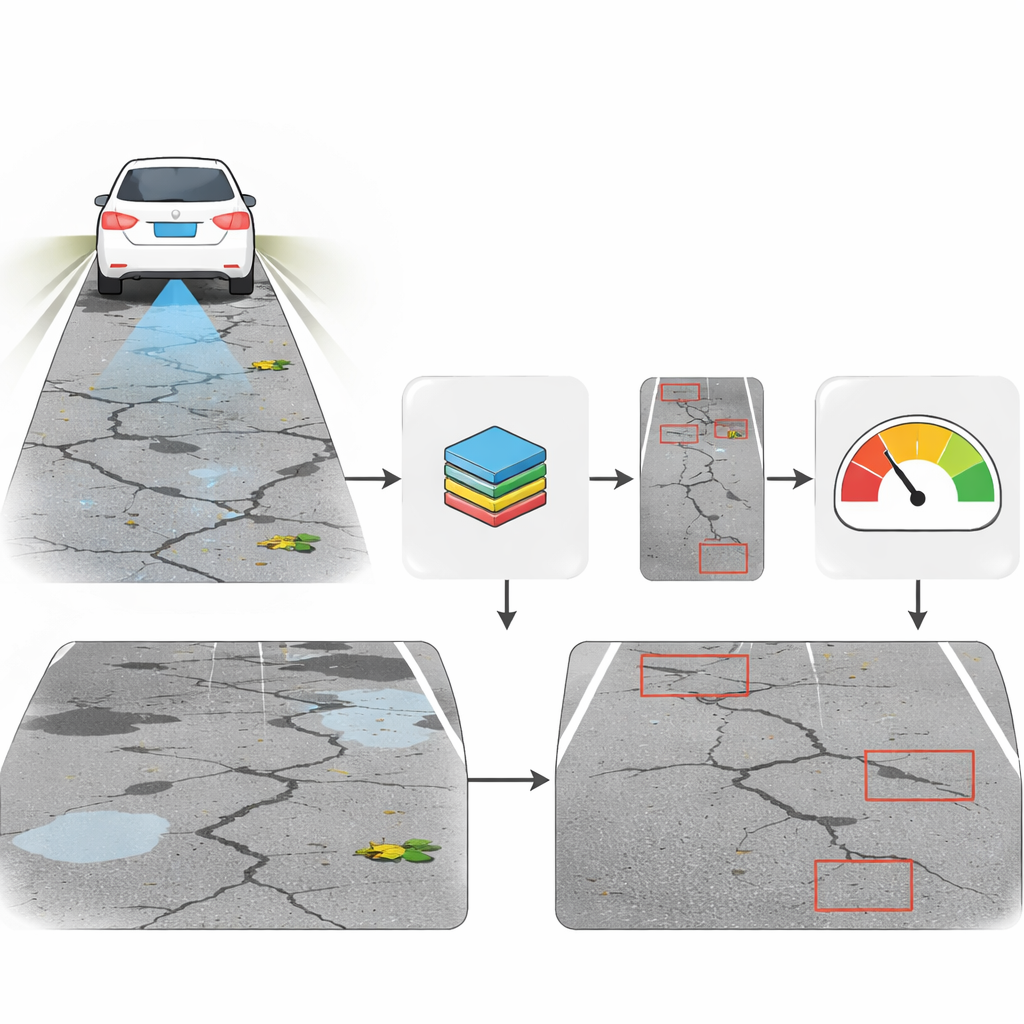
Spruckna vägar är mer än bara ett irritationsmoment. När små sprickor i beläggningen förblir oupptäckta kan de växa till djupa fåror och potthål som skadar fordon, fördröjer transporter och ökar olycksrisken. Vägmyndigheter vill upptäcka dessa problem tidigt med kameror monterade på inspektionsfordon, men dagens datorseendesystem missar ofta svaga sprickor eller förväxlar dem med skuggor, pölar och fläckar. Denna artikel introducerar en ny artificiell intelligensmodell, kallad Crack-YOLO, som kan hitta vägskador snabbt och noggrant även i röriga verkliga förhållanden, och som kan omvandla upptäckterna direkt till standardiserade beläggningshälsopoäng.
Att se sprickor i verkliga miljöer, inte bara i labbet
Många befintliga sprickdetektorer fungerar bra på prydliga testbilder men sviktar på faktiska gator, där strålkastarljus, träds skuggor, regnvatten, oljefläckar och nedfallna löv rör till bilden. Tunna och fina sprickor är särskilt svåra att känna igen: deras särdrag är svaga, de dyker ofta upp och försvinner och kan lätt förväxlas med ofarliga ytstrukturer. Författarna ramar in detta som tre sammanlänkade utmaningar: låg noggrannhet, stark känslighet för bakgrundsstörningar och dålig detektion av mycket små sprickor. Att lösa dessa problem är avgörande för moderna beläggningshanteringssystem, som förlitar sig på precisa kartor över vägskador för att avgöra när och var reparationer ska göras.
En lättare, skarpare digital blick
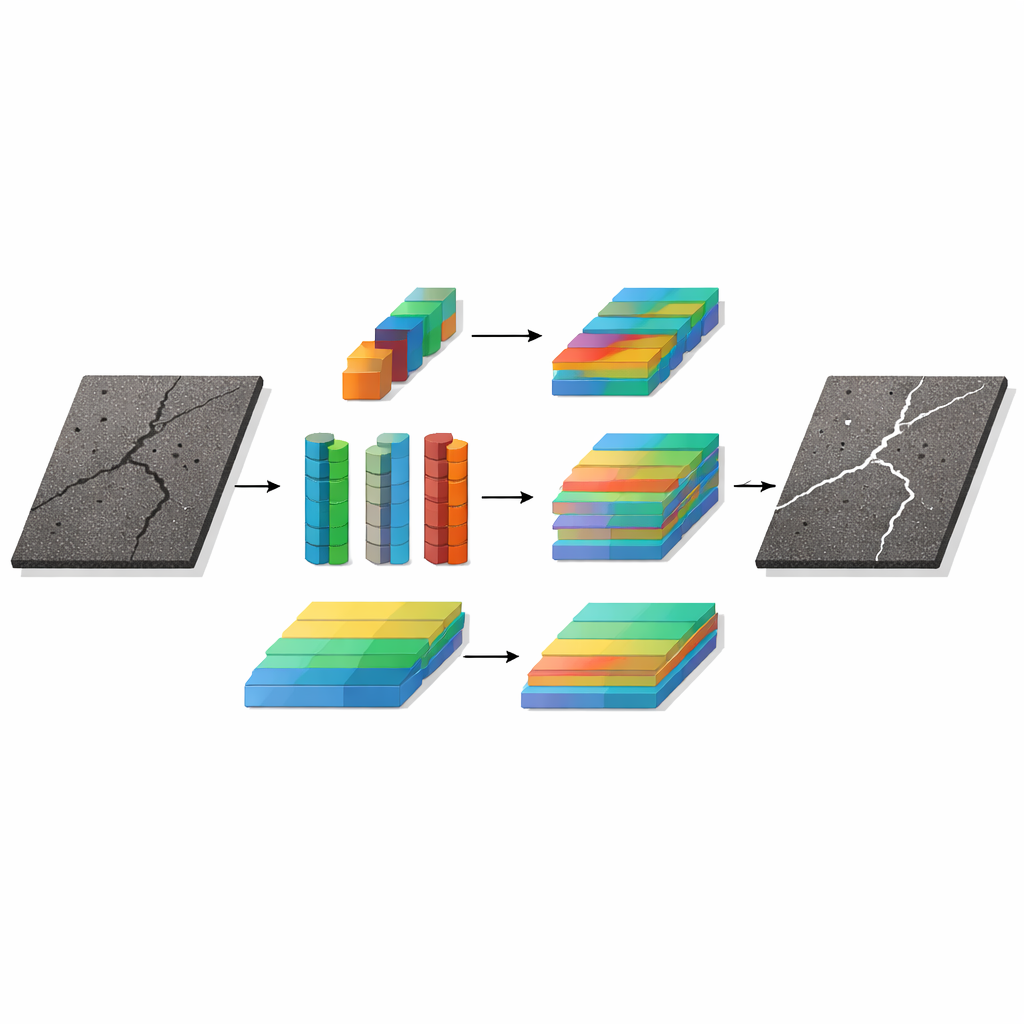
Crack-YOLO bygger vidare på en populär objektidentifieringsfamilj känd som YOLO, men omformar nyckelkomponenter så att systemet kan "se" mer intelligent samtidigt som det förblir tillräckligt lätt för små datorer. Först uppgraderas modellens grundläggande byggsten för bildanalys till en kontextstyrd enhet. Istället för att bara fokusera på små lokala fält blandar denna enhet information från närmaste omgivning och från den vidsträckta scenen. Det gör att modellen kan uppfatta en spricka som en sammanhängande linje mot vägbanans helhetsyta, vilket minskar risken att förväxla mörka fläckar eller skuggor med skador.
Följa fina linjer över flera skalor
Sprickor förekommer i många former och storlekar, från långa raka linjer till förgrenande "alligator"-mönster och runda potthål. För att anpassa sig till denna variation ersätter författarna fasta filter i en funktionsfusionsmodul med dynamiska filter som kan ändras beroende på indata. I praktiken håller modellen en liten uppsättning alternativa filter och lär sig hur man blandar dem i realtid, vilket hjälper den att fånga både tunna, slingrande sprickor och större förstörda områden utan att lägga till tung beräkning. Dessutom låter en ny utgångsdel nätverket blanda information från detaljrika lager och grovskaliga lager för varje position i bilden. Denna flerplansfusion hjälper systemet att följa sprickor som sträcker sig över stora områden samtidigt som den uppmärksammar skarpa kanter.
Bevisa prestanda i svåra vägsituationer
Teamet testar Crack-YOLO på fyra bildsamlingar av sprickor från olika länder, kameror och väderförhållanden, inklusive deras egen CrackVariety-datamängd som medvetet innehåller sol, regn, skuggor, stående vatten, oljefläckar och hinder. Överlag upptäcker den nya modellen fler verkliga sprickor samtidigt som den körs snabbare än en stark referensmodell, YOLOv8s. På CrackVariety ökar dess huvudsakliga detektionspoäng från cirka 40 % till över 71 %, medan bearbetningshastigheten nästan fördubblas till mer än 400 bilder per sekund på ett högpresterande grafikkort. På en särskilt brusig lågupplöst datamängd hittar den användbara mönster där många andra YOLO-baserade modeller misslyckas. Jämfört med klassiska detektorer som SSD och Faster R-CNN erbjuder den en mer stabil balans mellan noggrannhet och hastighet.
Från kameraramar till underhållsbeslut
För att visa att tillvägagångssättet inte bara är en laboratorieövning driftsätter författarna Crack-YOLO på en Raspberry Pi 5—en billig, kreditkortsstor dator lik den som kan monteras i ett litet inspektionsfordon. Även utan hårdvaruacceleratorer kan modellen analysera flera videoramar per sekund, tillräckligt snabbt för långsamtgående undersökningsfordon eller för att sampelera nyckelramar. Systemet går ett steg längre genom att koppla sina detektioner till Pavement Condition Index, en standard som används globalt. Det uppskattar det fysiska området för varje spricka utifrån kamerageometri, korrigerar för överestimering på grund av begränsande rutor och använder etablerade ingenjörsformler för att leverera en enda hälsopoäng för varje vägavsnitt.
Smartare inspektioner, jämnare resor
Sammanfattningsvis visar arbetet att det är möjligt att bygga en vägspårkdetektor som är både snabb och intelligent: Crack-YOLO hanterar röriga, lågkvalitativa bilder, spårar många typer av defekter och körs på blygsam hårdvara. Genom att mata sina fynd direkt in i standardiserade beläggningsbedömningar hjälper den att överbrygga klyftan mellan artificiell intelligensforskning och dagligt vägunderhåll. Om den vidareutvecklas till att fungera på pixelnivå och att fusa extra information som 3D-djup eller infrarött kan system som detta utgöra grund för högautomatiserad, kostnadseffektiv övervakning av vägnät—som fångar tidiga tecken på slitage långt innan de utvecklas till hjulknäckande potthål.
Citering: Fan, L., Tang, S., Ariffin, M.K.A.B.M. et al. A real-time detection framework for road cracks in noisy and morphologically complex environments. Sci Rep 16, 10107 (2026). https://doi.org/10.1038/s41598-026-41043-y
Nyckelord: detektion av vägkrackor, beläggningsövervakning, datorseende, djupinlärning, underhåll av infrastruktur