Clear Sky Science · de
Ein Echtzeit-Erkennungsrahmen für Straßenrisse in verrauschten und morphologisch komplexen Umgebungen
Warum es wichtig ist, Straßen in gutem Zustand zu halten
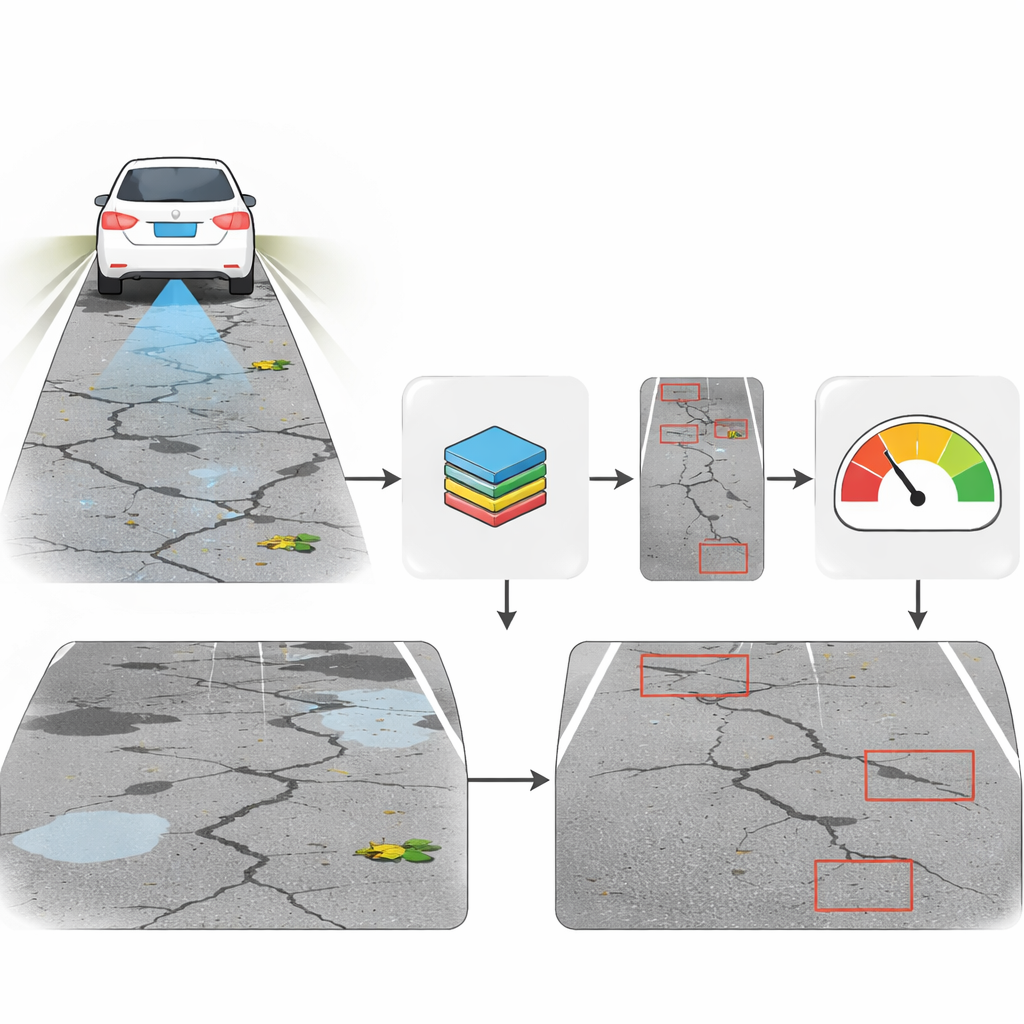
Rissige Straßen sind mehr als nur ein Ärgernis. Wenn kleine Haarrisse im Belag unbemerkt bleiben, können sie zu tiefen Spurrillen und Schlaglöchern anwachsen, die Fahrzeuge beschädigen, Lieferungen verzögern und das Unfallrisiko erhöhen. Straßenbehörden möchten diese Probleme frühzeitig mit Kameras auf Inspektionsfahrzeugen erkennen, doch die heutigen Computer-Vision-Tools übersehen oft schwache Risse oder werden durch Schatten, Pfützen und Verfärbungen verwirrt. Dieses Papier stellt ein neues KI-Modell namens Crack-YOLO vor, das Straßenschäden auch unter unordentlichen Realbedingungen schnell und präzise findet und diese Befunde direkt in standardisierte Belagszustandswerte überführen kann.
Risse in der realen Welt sehen, nicht nur im Labor
Viele vorhandene Risserkennungsmodelle funktionieren gut auf aufgeräumten Testbildern, versagen aber auf echten Straßen, wo Scheinwerferlicht, Baumschatten, Regenwasser, Ölflecken und abgefallene Blätter die Szene überfrachten. Dünne Haarrisse sind besonders schwer zu erfassen: ihre Merkmale sind schwach, sie treten oft nur stückweise auf und können leicht mit harmlosen Oberflächenmustern verwechselt werden. Die Autoren fassen dies als drei miteinander verknüpfte Herausforderungen: geringe Genauigkeit, starke Anfälligkeit für Hintergrundstörungen und schlechte Erkennung sehr kleiner Risse. Die Lösung dieser Probleme ist entscheidend für moderne Pavement-Management-Systeme, die auf präzisen Karten von Straßenschäden basieren, um zu entscheiden, wann und wo Reparaturen nötig sind.
Ein leichteres, schärferes digitales Auge
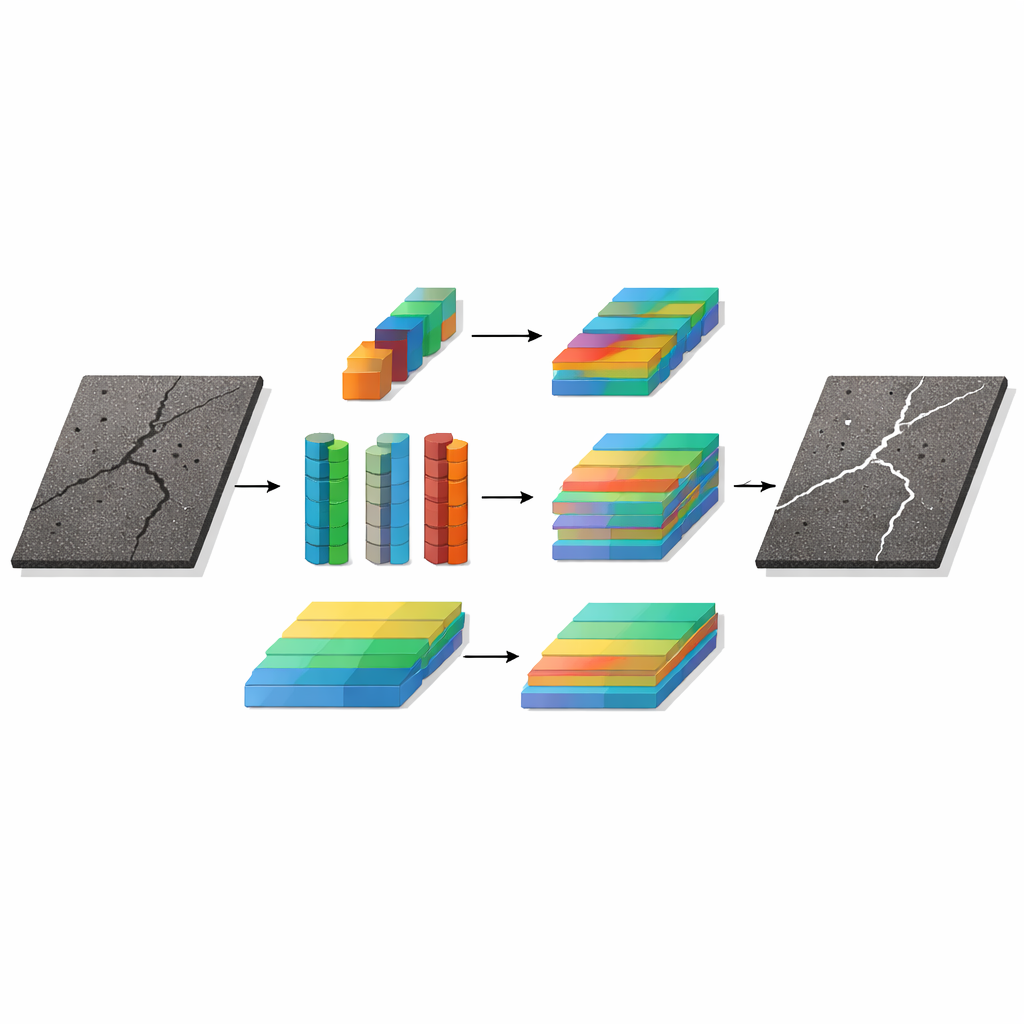
Crack-YOLO baut auf einer bekannten Objektdetektionsfamilie namens YOLO auf, gestaltet aber zentrale Komponenten neu, sodass das System intelligenter „sehen“ kann und gleichzeitig leichtgewichtig genug für kleine Rechner bleibt. Zunächst wird die grundlegende Baueinheit zur Bildanalyse zu einer kontextgeführten Einheit aufgewertet. Anstatt sich nur auf winzige lokale Patches zu konzentrieren, mischt diese Einheit Informationen aus der unmittelbaren Nachbarschaft und aus dem weiteren Umfeld. Dadurch kann das Modell einen Riss als zusammenhängende Linie vor der Gesamtoberfläche der Straße wahrnehmen und verwechselt dunkle Flecken oder Schatten weniger leicht mit Schäden.
Feine Linien über Skalen hinweg verfolgen
Risse treten in vielen Formen und Größen auf, von langen geraden Linien über verzweigende "Alligator"-Muster bis hin zu runden Schlaglöchern. Um sich an diese Vielfalt anzupassen, ersetzen die Autoren feste Filter innerhalb eines Feature-Fusions-Moduls durch dynamische Filter, die sich je nach Eingabe verändern können. Praktisch hält das Modell eine kleine Menge alternativer Filter vor und lernt, wie es sie zur Laufzeit mischt, was ihm hilft, sowohl dünne, gewundene Risse als auch größere Bruchflächen einzufangen, ohne die Rechenlast stark zu erhöhen. Darüber hinaus erlaubt ein neuer Ausgabekopf dem Netzwerk, Informationen aus Detail-Ebenen und groben Ebenen für jede Bildposition zu verschmelzen. Diese Multi-Skalen-Fusion hilft dem System, Risse zu verfolgen, die große Flächen überspannen, und gleichzeitig scharfe Kanten zu beachten.
Leistungsnachweis auf anspruchsvollen Straßenszenen
Das Team testet Crack-YOLO an vier Riss-Bildsammlungen aus verschiedenen Ländern, mit unterschiedlichen Kameras und Wetterbedingungen, einschließlich ihres eigenen CrackVariety-Datensatzes, der bewusst Sonne, Regen, Schatten, stehendes Wasser, Ölflecken und Hindernisse enthält. Über alle Datensätze hinweg erkennt das neue Modell mehr echte Risse und läuft dabei schneller als eine starke Vergleichsbasis, YOLOv8s. Auf CrackVariety steigt sein Hauptmaß für Erkennungsqualität von etwa 40 % auf über 71 %, während die Verarbeitungsgeschwindigkeit auf einer High-End-Grafikkarte nahezu verdoppelt wird und mehr als 400 Bilder pro Sekunde erreicht. In einem besonders verrauschten, niedrig aufgelösten Datensatz findet es nützliche Muster, wo viele andere YOLO-basierte Modelle versagen. Im Vergleich zu klassischen Detektoren wie SSD und Faster R-CNN bietet es ein stabileres Verhältnis von Genauigkeit und Geschwindigkeit.
Von Kamerabildern zu Wartungsentscheidungen
Um zu zeigen, dass der Ansatz nicht nur eine Laborübung ist, setzen die Autoren Crack-YOLO auf einem Raspberry Pi 5 ein — einem kostengünstigen, kartenähnlich kleinen Computer, wie er in kleinen Inspektionsfahrzeugen montiert werden könnte. Selbst ohne Hardwarebeschleuniger kann das Modell mehrere Videobilder pro Sekunde analysieren, schnell genug für langsam fahrende Erfassungswagen oder zur Auswahl wichtiger Frames. Das System geht einen Schritt weiter, indem es seine Detektionen mit dem Pavement Condition Index verknüpft, einem weltweit verwendeten Standard. Es schätzt die physische Fläche jedes Risses aus der Kamerageometrie, korrigiert Überbewertungen durch Begrenzungsrahmen und führt die Ergebnisse in etablierte ingenieurtechnische Formeln ein, um einen einzigen Zustandswert für jeden Straßenabschnitt auszugeben.
Intelligentere Inspektionen, sanftere Fahrten
Insgesamt zeigt die Arbeit, dass es möglich ist, einen Straßriss-Detektor zu entwickeln, der sowohl schnell als auch intelligent ist: Crack-YOLO verarbeitet verrauschte, qualitativ schwache Bilder, erkennt viele Schadensarten und läuft auf bescheidener Hardware. Indem es seine Befunde direkt in standardisierte Belagsbewertungen einspeist, hilft es, die Lücke zwischen KI-Forschung und alltäglicher Straßenwartung zu schließen. Wenn Systeme dieser Art weiter verfeinert werden — etwa auf Pixel-Ebene arbeiten und zusätzliche Informationen wie 3D-Tiefe oder Infrarotfusion einbeziehen — könnten sie die Grundlage für hochautomatisierte, kostengünstige Überwachungen von Straßennetzen bilden und frühe Verschleißanzeichen lange erkennen, bevor sie zu fahrzeuggefährdenden Schlaglöchern werden.
Zitation: Fan, L., Tang, S., Ariffin, M.K.A.B.M. et al. A real-time detection framework for road cracks in noisy and morphologically complex environments. Sci Rep 16, 10107 (2026). https://doi.org/10.1038/s41598-026-41043-y
Schlüsselwörter: Erkennung von Straßenrissen, Belagsüberwachung, Computer Vision, Deep Learning, Instandhaltung der Infrastruktur