Clear Sky Science · ar
إطار كشف في الوقت الحقيقي لشروخ الطرق في بيئات ضوضاءية ومعقدة شكليًا
لماذا الحفاظ على الطرق بحالة جيدة مهم
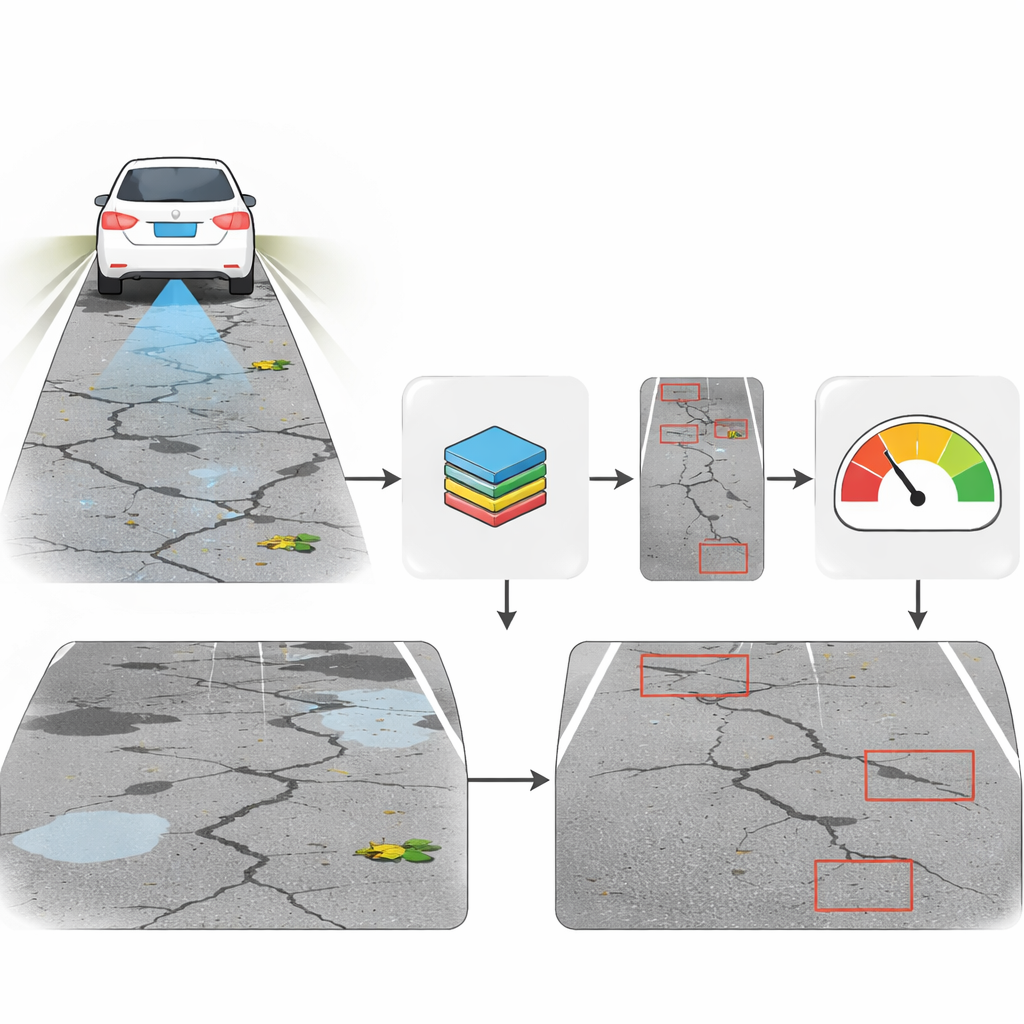
الشروخ في الطرق ليست مجرد إزعاج. عندما تمر تصدعات صغيرة في الرصيف دون أن تُكتشف، يمكن أن تنمو لتصبح أخاديد وحفر عميقة تُلحق أضرارا بالمركبات، وتُبطئ عمليات التسليم، وتزيد من مخاطر الحوادث. تود وكالات الطرق اكتشاف هذه المشاكل مبكرًا باستخدام كاميرات مركبة على سيارات التفتيش، لكن أدوات الرؤية الحاسوبية الحالية غالبًا ما تفوت الشروخ الشاحبة أو تختلط عليها الظلال، البرك والبقع. يقدم هذا البحث نموذجًا جديدًا للذكاء الاصطناعي، أطلقوا عليه اسم Crack-YOLO، يمكنه العثور على أضرار الطريق بسرعة ودقة حتى في ظروف العالم الحقيقي الفوضوية، ويحوّل هذه الاكتشافات مباشرةً إلى درجات قياسية لحالة الرصيف.
رؤية الشقوق في العالم الحقيقي، وليس فقط في المختبر
تعمل العديد من كاشفات الشقوق الحالية جيدًا على صور الاختبار النظيفة لكنها تتعثر في الشوارع الفعلية، حيث تملأ الأضواء الأمامية، ظل الأشجار، مياه الأمطار، بقع الزيت، والأوراق المتساقطة المشهد. الشروخ الدقيقة والسطحية صعبة التعرف عليها بشكل خاص: ميزاتها ضعيفة، غالبًا ما تظهر وتختفي، ويمكن بسهولة خلطها مع أنماط سطحية غير ضارة. يطرّح المؤلفون هذه المشاكل كثلاثة تحديات مترابطة: دقة منخفضة، حساسية قوية للتشويش الخلفي، وضعف في كشف الشقوق الصغيرة جدًا. حل هذه القضايا أمر حاسم لأنظمة إدارة الأرصفة الحديثة التي تعتمد على خرائط دقيقة لأضرار الطرق لتقرير متى وأين يجب الإصلاح.
عين رقمية أخفّ وأنشط
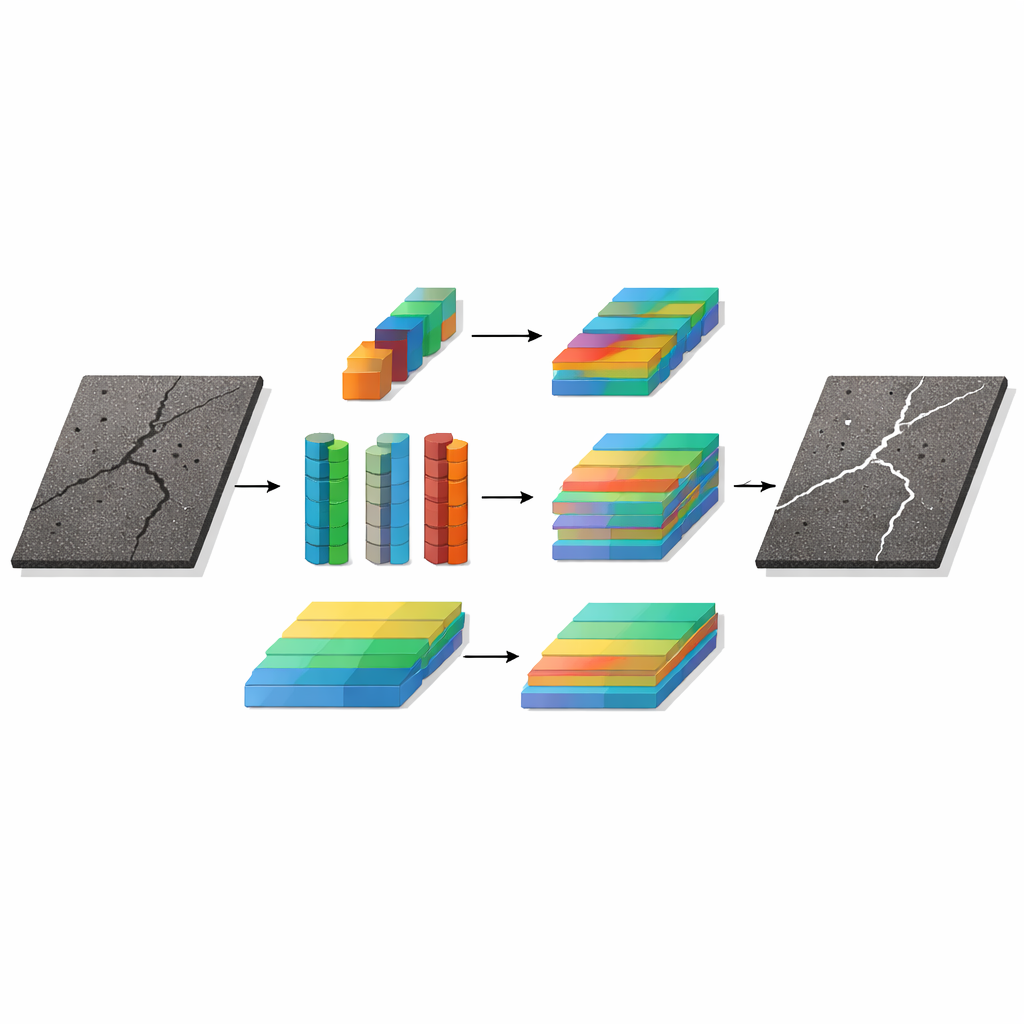
يبني Crack-YOLO على عائلة اكتشاف الكائنات الشهيرة المعروفة باسم YOLO، لكنه يعيد تصميم أجزاء رئيسية حتى يستطيع النظام «النظر» بذكاء أكبر مع البقاء خفيفًا بما يكفي لأجهزة حاسوب صغيرة. أولاً، تم ترقية الوحدة الأساسية لتحليل الصور إلى وحدة موجهة بالسياق. بدلاً من التركيز فقط على رقع محلية صغيرة، تدمج هذه الوحدة معلومات من الجوار المباشر ومن المشهد الأوسع. هذا يمكّن النموذج من رؤية الشق كسطر مستمر على خلفية سطح الطريق ككل، مما يقلّل احتمال خلط البقع الداكنة أو الظلال مع الأضرار.
متابعة الخطوط الدقيقة عبر المقاييس
تأتي الشقوق بأشكال وأحجام عديدة، من خطوط طويلة مستقيمة إلى أنماط متفرعة تشبه «جلد التمساح» وحفر دائرية. للتكيّف مع هذا التنوع، يحل المؤلفون مرشحات ديناميكية محل المرشحات الثابتة داخل وحدة دمج السمات، بحيث يمكن أن تتغير اعتمادًا على الإدخال. عمليًا، يحتفظ النموذج بمجموعة صغيرة من المرشحات البديلة ويتعلم كيفية مزجها بحسب الحاجة، مما يساعده على التقاط الشقوق الرفيعة والمتعرجة والمناطق المكسورة الأكبر دون إضافة حسابات ثقيلة. بالإضافة إلى ذلك، يتيح رأس إخراج جديد للشبكة مزج معلومات من طبقات التفاصيل الدقيقة وطبقات الصورة الكبرى عند كل موقع في الصورة. يساعد هذا الدمج متعدد المقاييس النظام على تتبع الشقوق التي تمتد عبر مساحات كبيرة مع الحفاظ على الانتباه إلى الحواف الحادة.
إثبات الأداء في مشاهد طرق صعبة
اختبر الفريق Crack-YOLO على أربع مجموعات صور لشقوق من دول وكاميرات وظروف مناخية مختلفة، بما في ذلك مجموعة بياناتهم CrackVariety التي تتضمن عمدًا شمسًا، مطرًا، ظلالًا، ماء راكد، بقع زيت، وعقبات. عبر هذه الاختبارات، يكتشف النموذج الجديد شقوقًا حقيقية أكثر في حين يعمل أسرع من مرجعية قوية، YOLOv8s. في مجموعة CrackVariety، يقفز مقياسه الرئيسي لجودة الكشف من حوالي 40% إلى أكثر من 71%، بينما تزداد سرعة المعالجة تقريبًا لتتجاوز 400 صورة في الثانية على بطاقة رسومات متقدمة. في مجموعة منخفضة الدقة ومشوشة بشكل خاص، يجد أنماطًا مفيدة حيث تفشل العديد من نماذج YOLO الأخرى. مقارنة بكاشفات كلاسيكية مثل SSD وFaster R-CNN، يقدم توازنًا أكثر استقرارًا بين الدقة والسرعة.
من إطارات الكاميرا إلى قرارات الصيانة
لإظهار أن النهج ليس مجرد تجربة مختبرية، ينشر المؤلفون Crack-YOLO على Raspberry Pi 5—حاسوب رخيص بحجم بطاقة الائتمان مشابه لما قد يُركّب في سيارة تفتيش صغيرة. حتى بدون مسرعات أجهزة، يمكن للنموذج تحليل عدة إطارات فيديو في الثانية، بسرعة كافية لسيارات المسح البطيئة أو لأخذ عينات من الإطارات الرئيسية. يتجاوز النظام ذلك بربط اكتشافاته بمؤشر حالة الرصيف (PCI)، وهو معيار مستخدم عالميًا. يقدّر المساحة الفيزيائية لكل شق من هندسة الكاميرا، يصحح الإفراط في التقدير الناجم عن صناديق الإحاطة، ويُدخل النتائج في صيغ هندسية معتمدة لإخراج درجة صحة واحدة لكل مقطع طريق.
تفتيش أذكى، وطرق أكثر سلاسة
بشكل عام، تُظهر هذه الدراسة أنه من الممكن بناء كاشف شقوق طرق سريع وذكي في آن واحد: يتعامل Crack-YOLO مع الصور المزدحمة ومنخفضة الجودة، ويتتبع أنواعًا عديدة من العيوب، ويعمل على أجهزة متواضعة. من خلال تغذية نتائجه مباشرةً في تصنيفات الأرصفة القياسية، يساعد في سد الفجوة بين بحوث الذكاء الاصطناعي وصيانة الطرق اليومية. إذا ما تم تطويره أكثر للعمل على مستوى البكسل الفردي ودمجه مع معلومات إضافية مثل العمق ثلاثي الأبعاد أو الأشعة تحت الحمراء، فقد تُكوّن أنظمة من هذا النوع أساسًا لمراقبة شبكات الطرق آليًا وبتكلفة منخفضة — تكتشف علامات البلى المبكرة قبل أن تتطور إلى حفر تعطب العجلات.
الاستشهاد: Fan, L., Tang, S., Ariffin, M.K.A.B.M. et al. A real-time detection framework for road cracks in noisy and morphologically complex environments. Sci Rep 16, 10107 (2026). https://doi.org/10.1038/s41598-026-41043-y
الكلمات المفتاحية: كشف شقوق الطرق, مراقبة الأرصفة, رؤية حاسوبية, التعلم العميق, صيانة البنية التحتية