Clear Sky Science · zh
基于森林环境中树木位置图匹配的无人机‑LiDAR点云无靶标配准
为什么对齐森林的激光观测很重要
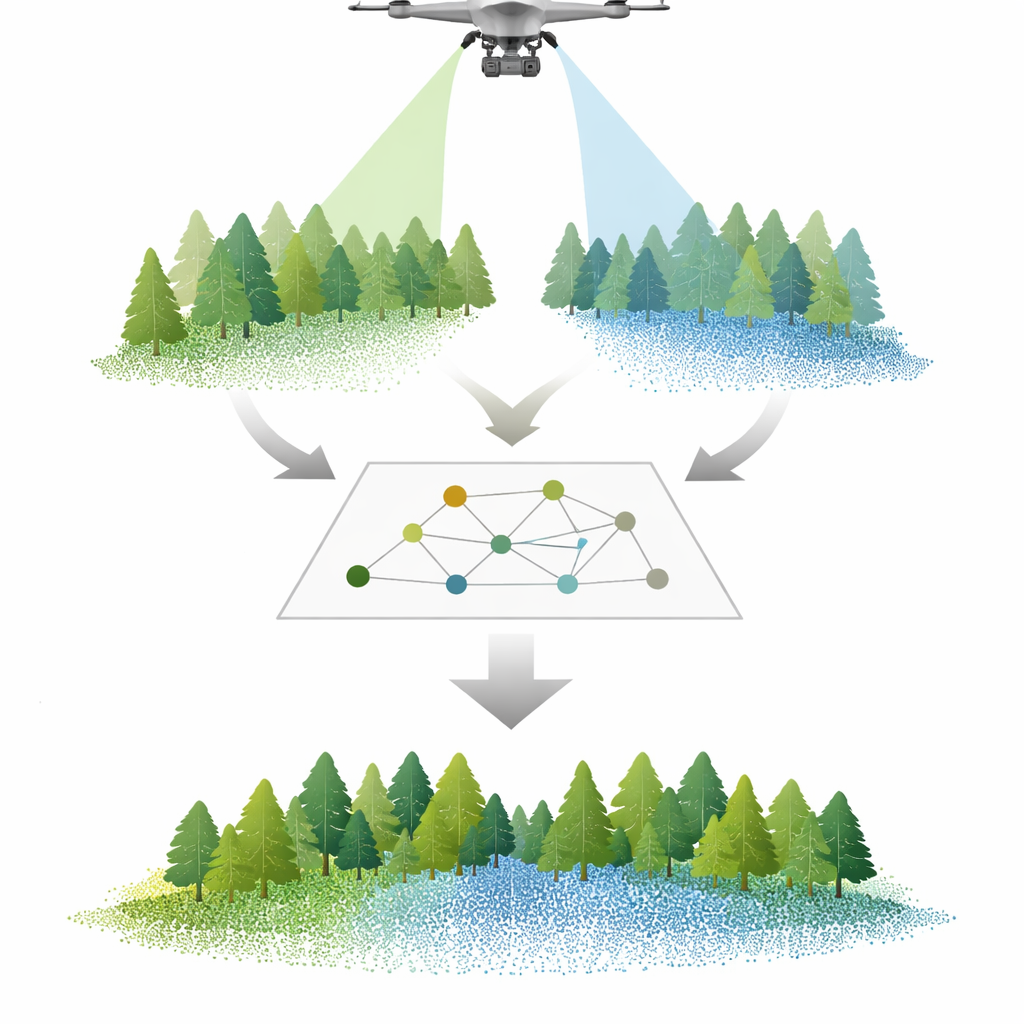
森林储存碳、为野生动植物提供栖息地并帮助调节气候,但要在大范围内逐棵测量其结构并不容易。搭载激光扫描仪的小型无人机(UAV‑LiDAR)能够以惊人的细节绘制森林,但这些数据是沿重叠的航迹采集的,常常不能完全对齐,尤其是在树冠茂密、卫星导航信号弱的地方。本研究提出了一种方法,利用树木自身作为天然的参考点,使这些重叠的激光扫描能够整齐拼接,而无需在地面放置任何人工靶标。
用飞行激光“看”森林
现代森林调查越来越依赖LiDAR,这种技术发出光脉冲并测量回波时间。安装在无人机上的LiDAR可以以厘米级分辨率捕捉树冠、枝叶和地表的形态。然 而,无人机通常沿长而平行的航线飞行,产生应当像屋顶瓦片一样重叠的点云条带。小的导航误差、树冠遮挡和起伏地形使这些条带很少能完全匹配。传统的对齐方法寻找平坦地面或简单几何特征,而这些在真实森林中稀少或被隐藏。作者转而关注一种既丰富又具有生态意义的要素:单个树木的分布模式。
把树当作天然的锚点网络
该新框架首先在每条LiDAR条带中分离地面与植被,并构建详尽的地形与冠层高度模型。由此,软件定位单个树冠顶点,并将每棵树视为网络中的一个节点。对于每棵树,记录其地面上邻树的距离、与邻树的高度差以及相对高低位置。这些简单的空间关系为每棵树周围的环境形成一种“指纹”。随后方法在重叠条带之间比较树木,搜索保留总体间距与高度格局的最佳一一配对。该匹配步骤借助一种最初用于比对生物序列的严格算法来求解,确保在整个样地中选出最一致的树对应集。
在三维中微调配准
找到匹配的树只完成了一半工作;仍需将扫描旋转和平移,使对应的树在三维空间中重合。为此,作者采用了一种受鸟群群体行为启发的优化方法,即粒子群优化。许多候选解(每个代表一组不同的旋转和平移)在搜索空间中移动,朝着能让匹配树尽可能靠近的排列汇聚,同时忽略明显的异常值。该过程产生了精确的、完整的三维变换,将一条LiDAR条带与另一条对齐,无需外部标志或高精度卫星定位,因此在导航信号不可靠的森林中尤为有用。
在真实林地中效果如何?
团队在中国东南沿海的一处森林公园进行了测试,使用来自八个圆形样地的数据,这些样地代表了不同树种、年龄和立木密度。样地包含杨、落羽松、苏格兰松等,叶片齐全时冠层致密,LiDAR点密度很高。配准后,匹配树之间的典型间距误差仅为几十厘米,均方根偏差视树种而异,大约在17–27厘米左右。与一种广泛使用的基线方法相比,正确匹配的树比例提高了约17–27个百分点,且在像落羽松这类冠幅清晰且相互分离的林分中改进尤为明显。冠层重叠严重的密集落叶林仍然具有挑战性,这表明未来需要更好的树冠分割工具。
这对森林监测意味着什么
通过将树视为网络中的点而非孤立对象,该框架提供了一种稳健的、无靶标的方法,把多个UAV‑LiDAR扫描对齐为单一一致的三维森林视图。对非专业读者而言,关键在于我们现在可以更准确地拼接重复的无人机森林调查,即使在卫星信号较差、地面被叶片遮盖的地方也能如此。这种对齐精度适合绘制冠层结构、跟踪森林生长并支持生物多样性和碳储量研究,尽管尚不足以满足毫米级的茎干精细测量。随着无人机与激光扫描仪在林业中的普及,类似方法将帮助把庞大的激光点云转化为可靠且可比较的地图,从而揭示森林随时间的演变。
引用: Fekry, R., Ali, E., Sani-Mohammed, A. et al. Target-less registration of UAV-LiDAR point clouds based on graph matching of tree locations in forest environments. Sci Rep 16, 12373 (2026). https://doi.org/10.1038/s41598-025-29590-2
关键词: 无人机 LiDAR, 森林制图, 点云配准, 树木检测, 遥感