Clear Sky Science · sv
Registrering av UAV‑LiDAR‑punktmoln utan markmål baserat på grafmatchning av trädpositioner i skogsmiljöer
Varför det är viktigt att få laserskanningar av skogar att passa ihop
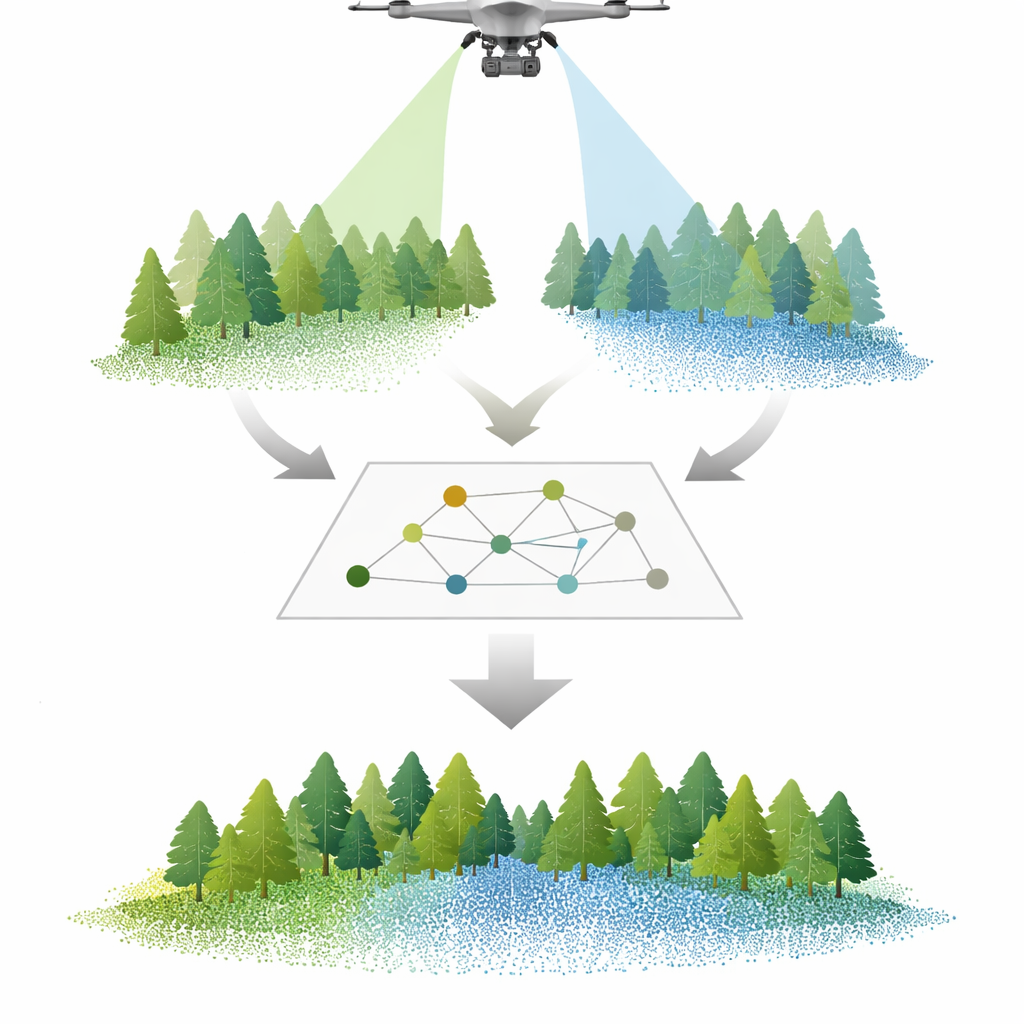
Skogar lagrar kol, ger skydd åt vilda djur och hjälper till att reglera klimatet, men det är svårt att mäta deras struktur träd för träd över stora områden. Små drönare utrustade med laserskannrar (UAV‑LiDAR) kan kartlägga skogar i imponerande detalj, men deras data fångas upp i överlappande flygstråk som ofta inte stämmer exakt, särskilt under täta kronor där satellitnavigeringssignaler är svaga. Denna studie introducerar ett sätt att få dessa överlappande laserskanningar att knäppas på plats genom att använda träden själva som naturliga referenspunkter, utan att behöva några konstgjorda markmål.
Att se skogen med flygande lasrar
Moderna skogsundersökningar förlitar sig i allt större utsträckning på LiDAR, en teknik som sänder ut ljuspulser och mäter hur lång tid det tar innan de studsar tillbaka. Monterad på drönare kan LiDAR fånga formen på trädtoppar, grenar och markytor med centimeterupplösning. En drönare flyger dock vanligtvis i långa, parallella stråk och skapar remsor av punktmoln som bör överlappa som takpannor. Små navigationsfel, kronblockering och kuperad terräng gör att dessa remsor sällan matchar perfekt. Traditionella justeringsmetoder söker efter plana markytor eller enkla geometriska drag, som är få eller dolda i verkliga skogar. Författarna fokuserar istället på något som både är rikligt och ekologiskt meningsfullt: mönstret av individuella träd.
Att använda träd som ett naturligt nätverk av ankare
Det nya ramverket börjar med att separera mark och vegetation i varje LiDAR-remsa och bygga detaljerade höjdmodeller av terrängen och kronan. Utifrån dessa modeller identifierar programvaran toppen på enskilda träd och behandlar varje träd som en nod i ett nätverk. För varje träd registreras avståndet till grannarna på marken, hur mycket de skiljer sig i höjd och hur de ligger i förhållande till varandra i höjdled. Dessa enkla rumsliga relationer utgör en typ av fingeravtryck för varje trädets omgivning. Metoden jämför sedan träd mellan överlappande remsor och söker efter den bästa en‑till‑en‑matchningen av träd som bevarar det övergripande mönstret av avstånd och höjd. Denna matchningsfas löses med en rigorös algoritm ursprungligen utvecklad för att alignera biologiska sekvenser, vilket säkerställer att den mest konsekventa mängden trädkorrespondenser väljs över hela provytan.
Finjustering av passningen i tre dimensioner
Att hitta matchande träd är bara halva uppgiften; skanningarna måste fortfarande roteras och förskjutas så att motsvarande träd hamnar på samma plats i 3D‑rymden. För detta använder författarna en optimeringsmetod inspirerad av flockbeteende hos fåglar, känd som particle swarm optimization. Många provlösningar, var och en representerande en annan kombination av rotationer och förskjutningar, rör sig genom sökrymden och vägleds mot den konfiguration som för samman matchande träd så nära som möjligt samtidigt som uppenbara avvikare ignoreras. Denna process ger en precis, fullständig tredimensionell transformation som justerar en LiDAR‑remsa till en annan utan att förlita sig på externa markörer eller högkvalitativ satellitpositionering, vilket gör metoden särskilt användbar i skogar där navigationssignaler är opålitliga.
Hur bra fungerar det i verkliga skogar?
Teamet testade sin metod i en kustnära skogspark i sydöstra Kina med data från åtta cirkulära provytor som representerade olika trädarter, åldrar och trädtäthet. Proverna innehöll poppel, dawn redwood, skotsk tall och andra arter, med täta lövklädda kronor och mycket höga LiDAR‑punktstätheter. Efter registrering var de typiska avståndsfelen mellan matchade träd bara några tiotals centimeter, med rotmedelkvadrat‑avvikelser (RMS) så låga som cirka 17–27 cm beroende på art. Andelen korrekt matchade träd ökade med ungefär 17–27 procent jämfört med en ofta använd baslinjemetod, och förbättringarna var särskilt tydliga i bestånd med distinkta, väl separerade kronor som dawn redwood. Täta lövfällande bestånd med överlappande kronor förblev utmanande, vilket visar var bättre verktyg för trädsegmentering kommer att behövas framöver.
Vad detta betyder för skogsovervakning
Genom att betrakta träd som punkter i ett nätverk snarare än isolerade objekt erbjuder detta ramverk ett robust, målfritt sätt att sammanfoga flera UAV‑LiDAR‑skanningar till en enhetlig, sammanhängande 3D‑vy av skogen. För icke‑specialister är huvudbudskapet att vi nu kan sy ihop upprepade drönarundersökningar av skogar mer exakt, även där satellitsignaler är svaga och marken är dold under lövverket. Denna nivå av justering passar väl för kartläggning av kronstruktur, spårning av skogstillväxt och stöd för studier av biologisk mångfald och kollagring, även om den ännu inte är tillräckligt noggrann för millimeternivåuppgifter som detaljerade stammätningar. I takt med att drönare och laserskannrar blir vanligare i skogsbruket kommer metoder som denna hjälpa till att förvandla stora moln av laserpunkter till pålitliga, jämförbara kartor som visar hur skogar förändras över tid.
Citering: Fekry, R., Ali, E., Sani-Mohammed, A. et al. Target-less registration of UAV-LiDAR point clouds based on graph matching of tree locations in forest environments. Sci Rep 16, 12373 (2026). https://doi.org/10.1038/s41598-025-29590-2
Nyckelord: UAV LiDAR, skogskartering, punktmolnsregistrering, trädidentifiering, fjärranalys