Clear Sky Science · de
Ziel‑freie Registrierung von UAV‑LiDAR‑Punktwolken basierend auf Graphenabgleich von Baumstandorten in Waldumgebungen
Warum das Ausrichten von Laseransichten von Wäldern wichtig ist
Wälder speichern Kohlenstoff, bieten Lebensraum für Tiere und helfen, das Klima zu regulieren, doch ist es schwierig, ihre Struktur Baum für Baum über große Flächen zu erfassen. Kleine Drohnen mit Laserscannern (UAV‑LiDAR) können Wälder in bemerkenswerten Details erfassen, doch die Daten entstehen in sich überlappenden Flugbahnen, die sich oft nicht perfekt aneinanderfügen — besonders unter dichtem Kronendach, wo Satellitennavigationssignale schwach sind. Diese Studie stellt eine Methode vor, mit der sich diese überlappenden Laserscans anhand der Bäume selbst als natürliche Referenzpunkte sauber zusammenfügen lassen, ohne manuell angebrachte Ziele am Boden zu benötigen.
Den Wald mit fliegenden Lasern sehen
Moderne Waldvermessungen stützen sich zunehmend auf LiDAR, eine Technologie, die Lichtpulse aussendet und misst, wie lange deren Rückkehr dauert. Auf Drohnen montiert kann LiDAR die Form von Baumkronen, Ästen und Bodenoberflächen in Zentimeterauflösung erfassen. Eine Drohne fliegt dabei typischerweise in langen, parallelen Bahnen und erzeugt Streifen von Punktwolken, die sich wie Dachziegel überlappen sollten. Kleine Navigationsfehler, Blockaden durch das Kronendach und hügeliges Gelände führen jedoch dazu, dass diese Kacheln selten exakt zusammenpassen. Traditionelle Ausrichtungsverfahren suchen nach ebenen Bodenflächen oder einfachen geometrischen Merkmalen, die in echten Wäldern selten oder verdeckt sind. Die Autorinnen und Autoren konzentrieren sich stattdessen auf etwas, das sowohl zahlreich als auch ökologisch bedeutsam ist: das Muster individueller Bäume.
Bäume als natürliches Netzwerk von Ankern nutzen
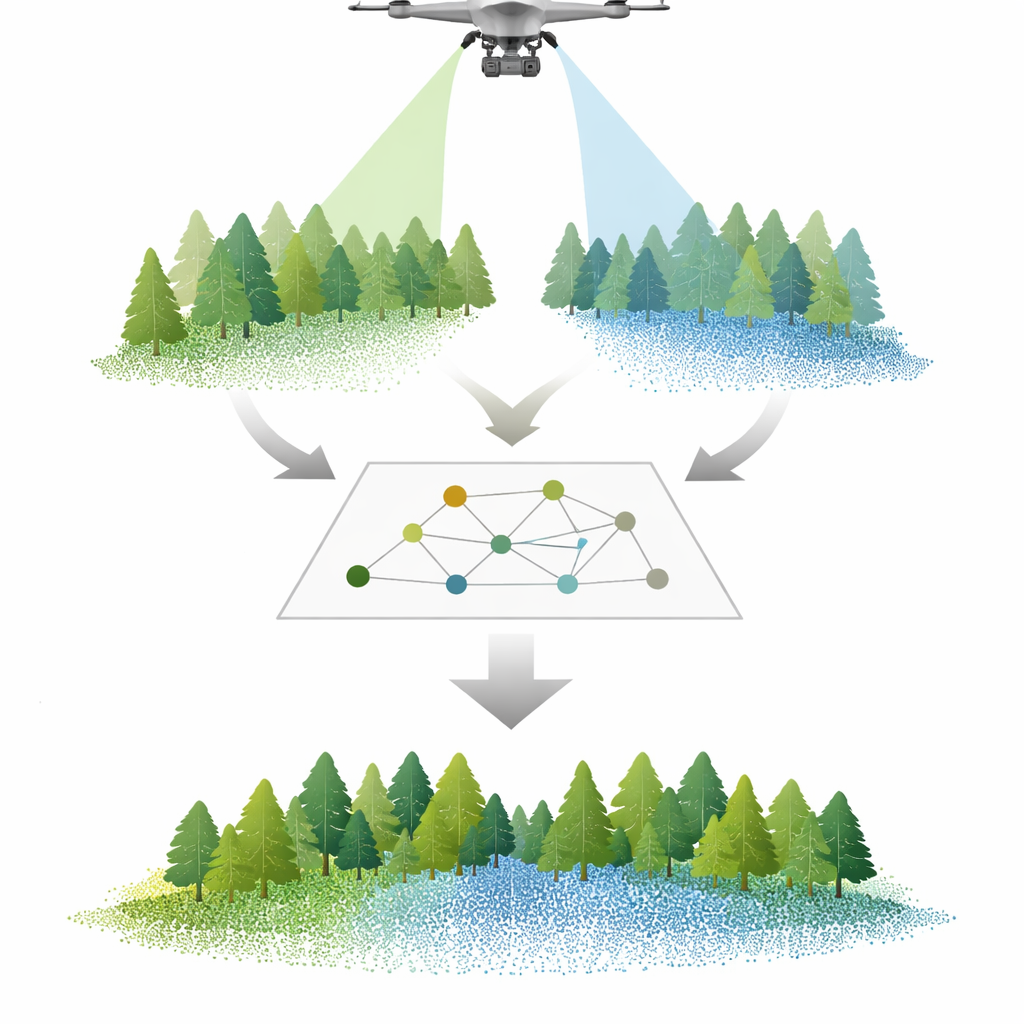
Das neue Rahmenkonzept beginnt damit, in jedem LiDAR‑Streifen Boden und Vegetation zu trennen und detaillierte Höhenmodelle von Gelände und Kronendach zu erstellen. Daraus ermittelt die Software die Kronen- oder Baumkronenspitzen einzelner Bäume und behandelt jeden Baum als Knoten in einem Netzwerk. Für jeden Baum wird aufgezeichnet, wie weit seine Nachbarn am Boden entfernt sind, wie groß die Höhenunterschiede sind und wie sie zueinander positioniert sind. Diese einfachen räumlichen Beziehungen bilden eine Art Fingerabdruck für die Nachbarschaft jedes Baums. Die Methode vergleicht dann Bäume zwischen überlappenden Streifen und sucht die beste Eins‑zu‑Eins‑Zuordnung von Bäumen, die das Gesamtmuster von Abständen und Höhen erhält. Dieser Abgleich wird mit einem rigorosen Algorithmus gelöst, der ursprünglich zur Ausrichtung biologischer Sequenzen entwickelt wurde, und stellt sicher, dass über die gesamte Parzelle hinweg die konsistenteste Menge an Baumkorrespondenzen gewählt wird.
Feinabstimmung der Anpassung in drei Dimensionen
Passende Bäume zu finden ist nur die halbe Aufgabe; die Scans müssen noch so rotiert und verschoben werden, dass entsprechende Bäume im dreidimensionalen Raum zusammenfallen. Dafür verwenden die Autorinnen und Autoren einen Optimierungsansatz, der von Vogelschwarmverhalten inspiriert ist, bekannt als Particle Swarm Optimization. Viele Versuchslösungen, die jeweils verschiedene Kombinationen von Rotation und Verschiebung repräsentieren, bewegen sich durch den Suchraum und werden in Richtung der Anordnung geführt, die korrespondierende Bäume möglichst nahe zusammenbringt, während offensichtliche Ausreißer ignoriert werden. Dieser Prozess liefert eine präzise, vollständige dreidimensionale Transformation, die einen LiDAR‑Streifen an einen anderen ausrichtet, ohne sich auf externe Marker oder hochgenaue Satellitennavigation zu stützen — besonders nützlich in Wäldern mit unzuverlässigen Navigationssignalen.
Wie gut funktioniert es in echten Wäldern?
Das Team testete seine Methode in einem Küstenwaldpark im Südosten Chinas, mit Daten aus acht kreisförmigen Plots, die verschiedene Baumarten, Altersklassen und Stammdichten repräsentieren. Die Plots enthielten Pappel, Metasequoia (Dawn Redwood), Waldkiefer und andere Arten, mit dichten Laub‑auf Kronen und sehr hoher LiDAR‑Punktdichte. Nach der Registrierung lagen die typischen Abstandsfehler zwischen gematchten Bäumen nur bei wenigen zehn Zentimetern, mit quadratischen Mittelwerten der Abstände (RMS) von etwa 17–27 cm, je nach Art. Der Anteil korrekt zugeordneter Bäume erhöhte sich um etwa 17–27 Prozent gegenüber einer weit verbreiteten Basismethode, und Verbesserungen waren besonders deutlich in Beständen mit deutlichen, gut getrennten Kronen wie bei Metasequoia. Dichte Laubwälder mit überlappenden Kronen blieben herausfordernd, was zeigt, wo künftig bessere Baumsegmentierungswerkzeuge benötigt werden.
Was das für die Waldbeobachtung bedeutet
Indem Bäume als Punkte in einem Netzwerk statt als isolierte Objekte behandelt werden, bietet dieses Framework einen robusten, ziel‑freien Weg, mehrere UAV‑LiDAR‑Scans zu einer einzigen, kohärenten 3D‑Ansicht des Waldes zusammenzufügen. Für Nicht‑Spezialisten ist die Kernbotschaft, dass sich wiederholte Drohnenvermessungen von Wäldern jetzt präziser zusammenfügen lassen, selbst dort, wo Satellitensignale schlecht sind und der Boden von Laub verdeckt wird. Dieses Ausrichtungsniveau eignet sich gut für die Kartierung der Kronenstruktur, die Nachverfolgung von Waldwachstum und die Unterstützung von Biodiversitäts‑ und Kohlenstoffspeicherstudien, auch wenn es noch nicht präzise genug für Millimeter‑genaue Aufgaben wie detaillierte Stammvermessungen ist. Mit der zunehmenden Verbreitung von Drohnen und Laserscannern in der Forstwirtschaft werden Methoden wie diese helfen, riesige Laserpunktwolken in verlässliche, vergleichbare Karten zu überführen, die zeigen, wie sich Wälder im Laufe der Zeit verändern.
Zitation: Fekry, R., Ali, E., Sani-Mohammed, A. et al. Target-less registration of UAV-LiDAR point clouds based on graph matching of tree locations in forest environments. Sci Rep 16, 12373 (2026). https://doi.org/10.1038/s41598-025-29590-2
Schlüsselwörter: UAV LiDAR, Waldkartierung, Punktwolkenregistrierung, Baumerkennung, Fernerkundung