Clear Sky Science · ja
森林環境における樹木位置のグラフマッチングに基づく UAV‑LiDAR 点群のターゲット不要な位置合わせ
森林のレーザー視点を整えることが重要な理由
森林は炭素を蓄え、野生生物に棲みかを提供し、気候の調節にも寄与しますが、広域にわたって個々の樹木ごとの構造を測るのは難しい問題です。小型ドローンに搭載したレーザースキャナ(UAV‑LiDAR)は森林を驚くほど詳細に測ることができますが、そのデータは通常、重なり合う飛行経路で取得され、特に衛星測位信号が弱い茂った樹冠下では位置が完全に一致しないことが多いです。本研究は、地上に設置した人工ターゲットを使わず、樹木そのものを自然の基準点として利用することで、重なったレーザースキャンをきれいに整合させる手法を提示します。
飛行するレーザーで森林を見る
現代の森林調査はますます LiDAR に依存しています。LiDAR は光パルスを送り、反射に要する時間を測る技術です。ドローン搭載の LiDAR は樹冠、枝、地表の形状をセンチメートル単位で捉えられます。しかしドローンは通常、長い平行の経路を飛行するため、屋根のタイルのように重なり合う点群のストリップが生成されます。小さな航法誤差、樹冠による遮蔽、起伏のある地形が原因で、それらのタイルは滅多に厳密に一致しません。従来の整合手法は平坦な地面領域や単純な幾何学的特徴を探しますが、実際の森林ではそれらは稀であったり隠れていたりします。著者らは代わりに、豊富で生態学的にも意味のあるもの——個々の樹木の分布パターン——に着目しました。
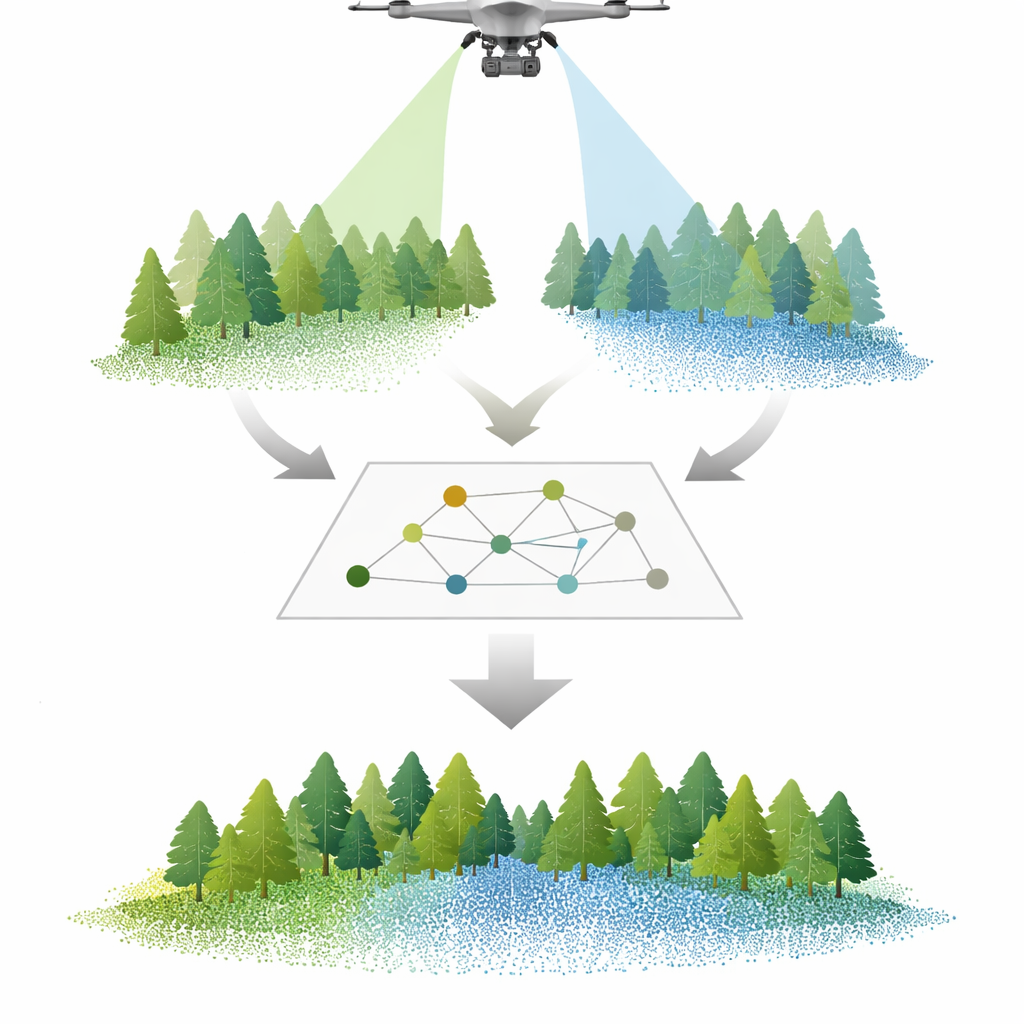
樹木を自然のアンカーのネットワークとして利用する
新しい枠組みは各 LiDAR ストリップで地表と植生を分離し、地形と樹冠の詳細な高低モデルを作成するところから始まります。そこからソフトウェアは個々の樹頂を特定し、各樹木をネットワークのノードとして扱います。各樹木について、近隣の樹木までの地上距離、高さ差、および互いの上下関係を記録します。これらの単純な空間関係がそれぞれの樹木周辺のフィンガープリントを形成します。方法は次に、重なり合うストリップ間で樹木を比較し、間隔と高さの全体的なパターンを維持する最良の一対一対応を探索します。このマッチング段階は、生物学的配列の整列に元々設計された厳密なアルゴリズムで解かれ、プロット全体で最も一貫性ある樹木対応の集合が選ばれます。
3次元での微調整
対応する樹木を見つけることは仕事の半分にすぎません。対応した樹木が 3D 空間で同じ位置に来るように、スキャンを回転・平行移動させる必要があります。これには、鳥の群れ行動に触発された最適化手法、いわゆる粒子群最適化を用います。回転や平行移動の異なる組み合わせを表す多くの試行解が探索空間を移動し、明らかな外れ値を無視しつつ対応する樹木を可能な限り近づける配列に向かって導かれます。この過程により、外部のマーカーや高精度の衛星測位に依存せずに、一つの LiDAR ストリップを別のストリップに整合させる精密な完全 3 次元変換が得られます。これにより、航法信号が信頼できない森林環境で特に有用になります。
実際の森林でどれほどうまく機能するか
研究チームは中国東南部の沿岸森林公園で本手法を検証し、樹種、年代、立木密度が異なる 8 つの円形調査区のデータを用いました。調査区にはポプラ、イチョウ(※原文の「dawn redwood」は「メタセコイア(アケボノスギ)」に相当しますが、ここでは一般名を示します)、マツなどが含まれ、葉付きの濃密な樹冠と非常に高い LiDAR 点密度が特徴でした。位置合わせ後、対応した樹木間の典型的な間隔誤差は数十センチにとどまり、種によっては二乗平均平方根誤差が約 17~27 cm と低い値を示しました。一般的に広く使われるベースライン手法と比べて正しく対応付けられた樹木の割合は約 17~27%向上し、メタセコイアのように明瞭で十分に分離した樹冠を持つ林分では改善が特に顕著でした。一方、重なり合う樹冠を持つ密な落葉広葉樹林では依然として困難が残り、将来的により良い樹木分割ツールが必要であることを示しました。
森林モニタリングにとっての意義
樹木を孤立した対象ではなくネットワーク上の点として扱うことで、この枠組みは複数の UAV‑LiDAR スキャンを一つの一貫した 3D 表現に整列させる堅牢でターゲット不要な方法を提供します。一般向けの要点は、衛星信号が乏しく地表が葉で覆われている場所でも、ドローンによる森林観測をより正確につなぎ合わせられるようになったことです。このレベルの整合は樹冠構造のマッピング、森林成長の追跡、生物多様性や炭素貯留に関する研究に適していますが、幹の詳細測定のようなミリメートル単位の作業にはまだ十分に精密ではありません。ドローンとレーザースキャナが林業で普及するにつれて、このような手法は膨大なレーザ点群を信頼でき比較可能な地図へと変換し、森林の変化を長期的に明らかにするのに役立ちます。
引用: Fekry, R., Ali, E., Sani-Mohammed, A. et al. Target-less registration of UAV-LiDAR point clouds based on graph matching of tree locations in forest environments. Sci Rep 16, 12373 (2026). https://doi.org/10.1038/s41598-025-29590-2
キーワード: UAV LiDAR, 森林マッピング, 点群位置合わせ, 樹木検出, リモートセンシング