Clear Sky Science · en
Target-less registration of UAV-LiDAR point clouds based on graph matching of tree locations in forest environments
Why lining up laser views of forests matters
Forests store carbon, shelter wildlife, and help regulate climate, yet it is hard to measure their structure tree by tree over large areas. Small drones carrying laser scanners (UAV‑LiDAR) can map forests in remarkable detail, but their data are captured in overlapping flight paths that often do not line up perfectly, especially under dense canopies where satellite navigation signals are weak. This study introduces a way to make those overlapping laser scans snap neatly into place by using the trees themselves as natural reference points, without needing any man‑made targets on the ground.
Seeing the forest with flying lasers
Modern forest surveys increasingly rely on LiDAR, a technology that sends out pulses of light and measures how long they take to bounce back. Mounted on drones, LiDAR can capture the shape of treetops, branches, and ground surfaces at centimeter resolution. However, a drone typically flies in long, parallel paths, creating strips of point clouds that should overlap like tiles on a roof. Small navigation errors, canopy blockage, and hilly terrain mean those tiles rarely match up perfectly. Traditional alignment methods look for flat ground patches or simple geometric features, which are scarce or hidden in real forests. The authors instead focus on something that is both abundant and ecologically meaningful: the pattern of individual trees.
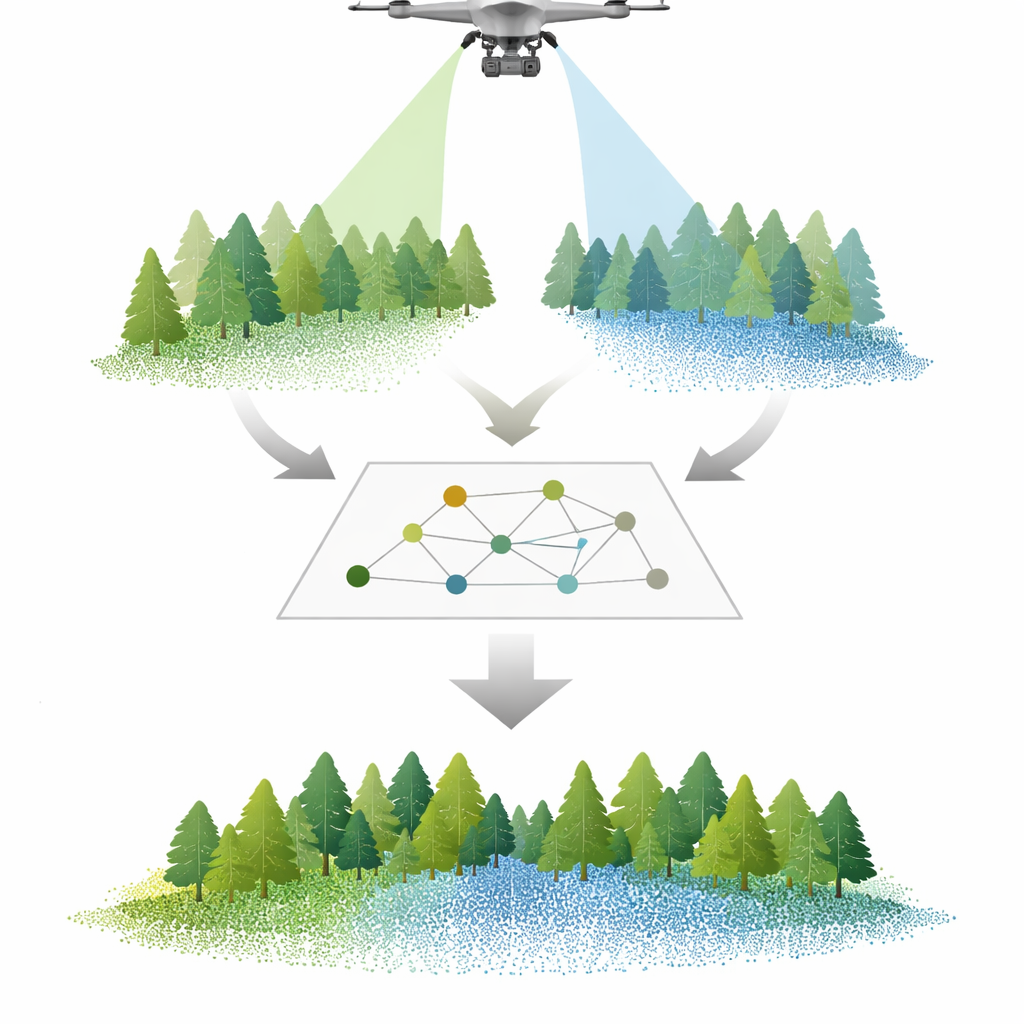
Using trees as a natural network of anchors
The new framework begins by separating ground and vegetation in each LiDAR strip and building detailed height models of the terrain and canopy. From these, the software pinpoints the tops of individual trees and treats each tree as a node in a network. For every tree, it records how far away its neighbors are on the ground, how much they differ in height, and how they sit above or below each other. These simple spatial relationships form a kind of fingerprint for each tree’s neighborhood. The method then compares trees between overlapping strips, searching for the best one‑to‑one pairing of trees that preserves the overall pattern of spacing and height. This matching step is solved with a rigorous algorithm originally designed to align biological sequences, ensuring that the most consistent set of tree correspondences is chosen across the whole plot.
Fine‑tuning the fit in three dimensions
Finding matching trees is only half the task; the scans still need to be rotated and shifted so that corresponding trees land in the same place in 3D space. To do this, the authors use an optimization approach inspired by the flocking behavior of birds, known as particle swarm optimization. Many trial solutions, each representing a different combination of rotations and shifts, move through the search space, guided toward the arrangement that brings matching trees as close together as possible while ignoring obvious outliers. This process yields a precise, full three‑dimensional transformation that aligns one LiDAR strip to another without relying on external markers or high‑quality satellite positioning, making it particularly useful in forests where navigation signals are unreliable.
How well does it work in real woods?
The team tested their method in a coastal forest park in southeast China, using data from eight circular plots representing different tree species, ages, and stem densities. Plots contained poplar, dawn redwood, Scots pine, and other species, with dense leaf‑on canopies and very high LiDAR point densities. After registration, the typical spacing errors between matched trees were only a few tens of centimeters, with root‑mean‑square offsets as low as about 17–27 cm depending on species. The proportion of correctly matched trees increased by roughly 17–27 percent compared with a widely used baseline method, and improvements were especially strong in stands with distinct, well‑separated crowns such as dawn redwood. Dense deciduous stands with overlapping canopies remained challenging, revealing where better tree‑segmentation tools will be needed in the future.
What this means for forest monitoring
By treating trees as points in a network rather than isolated objects, this framework offers a robust, target‑less way to line up multiple UAV‑LiDAR scans into a single, coherent 3D view of the forest. For non‑specialists, the key message is that we can now stitch together repeated drone surveys of forests more accurately, even where satellite signals are poor and the ground is hidden beneath foliage. This level of alignment is well suited for mapping canopy structure, tracking forest growth, and supporting biodiversity and carbon‑storage studies, although it is not yet precise enough for millimeter‑scale tasks such as detailed stem measurements. As drones and laser scanners become more common in forestry, methods like this will help turn vast clouds of laser points into reliable, comparable maps that reveal how forests are changing over time.
Citation: Fekry, R., Ali, E., Sani-Mohammed, A. et al. Target-less registration of UAV-LiDAR point clouds based on graph matching of tree locations in forest environments. Sci Rep 16, 12373 (2026). https://doi.org/10.1038/s41598-025-29590-2
Keywords: UAV LiDAR, forest mapping, point cloud registration, tree detection, remote sensing