Clear Sky Science · nl
Registratie van UAV‑LiDAR‑puntwolken zonder doelen op basis van graf‑matching van boomlocaties in bosomgevingen
Waarom het afstemmen van laservizieringen van bossen belangrijk is
Bossen slaan koolstof op, bieden onderdak aan wilde dieren en helpen het klimaat regelen, maar het is moeilijk om hun structuur boom voor boom over grote gebieden te meten. Kleine drones met laserscanners (UAV‑LiDAR) kunnen bossen in opmerkelijk detail in kaart brengen, maar hun gegevens worden vastgelegd in overlappende vliegroutes die vaak niet perfect op elkaar aansluiten, vooral onder dichte kruinen waar satellietnavigatiesignalen zwak zijn. Deze studie introduceert een manier om die overlappende laserscans netjes op hun plaats te laten vallen door de bomen zelf te gebruiken als natuurlijke referentiepunten, zonder dat er kunstmatige doelen op de grond nodig zijn.
Het bos bekijken met vliegende lasers
Moderne bosinventarisaties vertrouwen steeds meer op LiDAR, een technologie die lichtpulsen uitzendt en meet hoe lang het duurt voordat ze terugkaatsen. Aan drones bevestigd kan LiDAR de vorm van boomkruinen, takken en grondoppervlakken vastleggen met centimeternauwkeurigheid. Een drone vliegt echter doorgaans in lange, parallelle banen, waardoor stroken puntwolken ontstaan die als tegels overlappen. Kleine navigatiefouten, blokkades door de kruin en heuvelachtig terrein zorgen ervoor dat die tegels zelden precies overeenkomen. Traditionele uitlijningsmethoden zoeken naar vlakke grondvakken of eenvoudige geometrische kenmerken, die schaars of verborgen zijn in echte bossen. De auteurs richten zich in plaats daarvan op iets dat zowel overvloedig als ecologisch betekenisvol is: het patroon van individuele bomen.
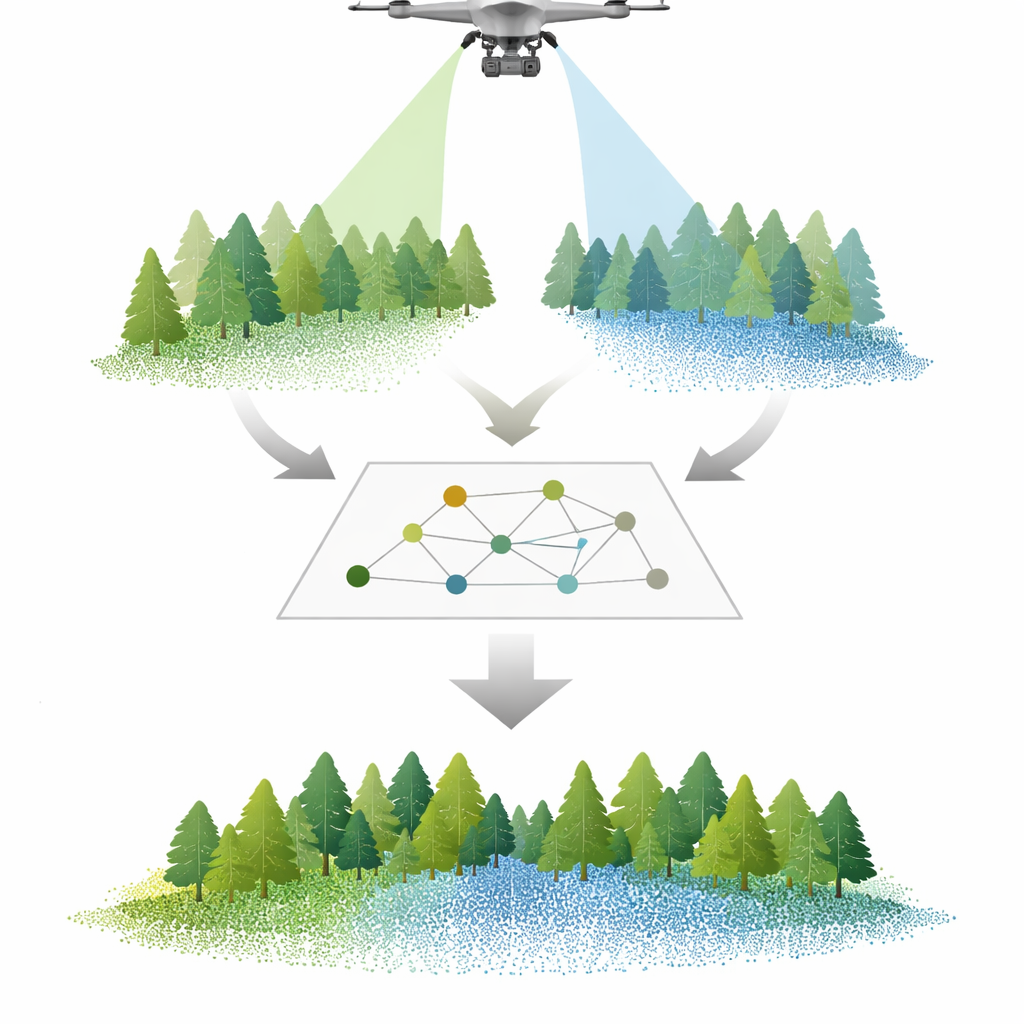
Bomen gebruiken als een natuurlijk netwerk van ankerpunten
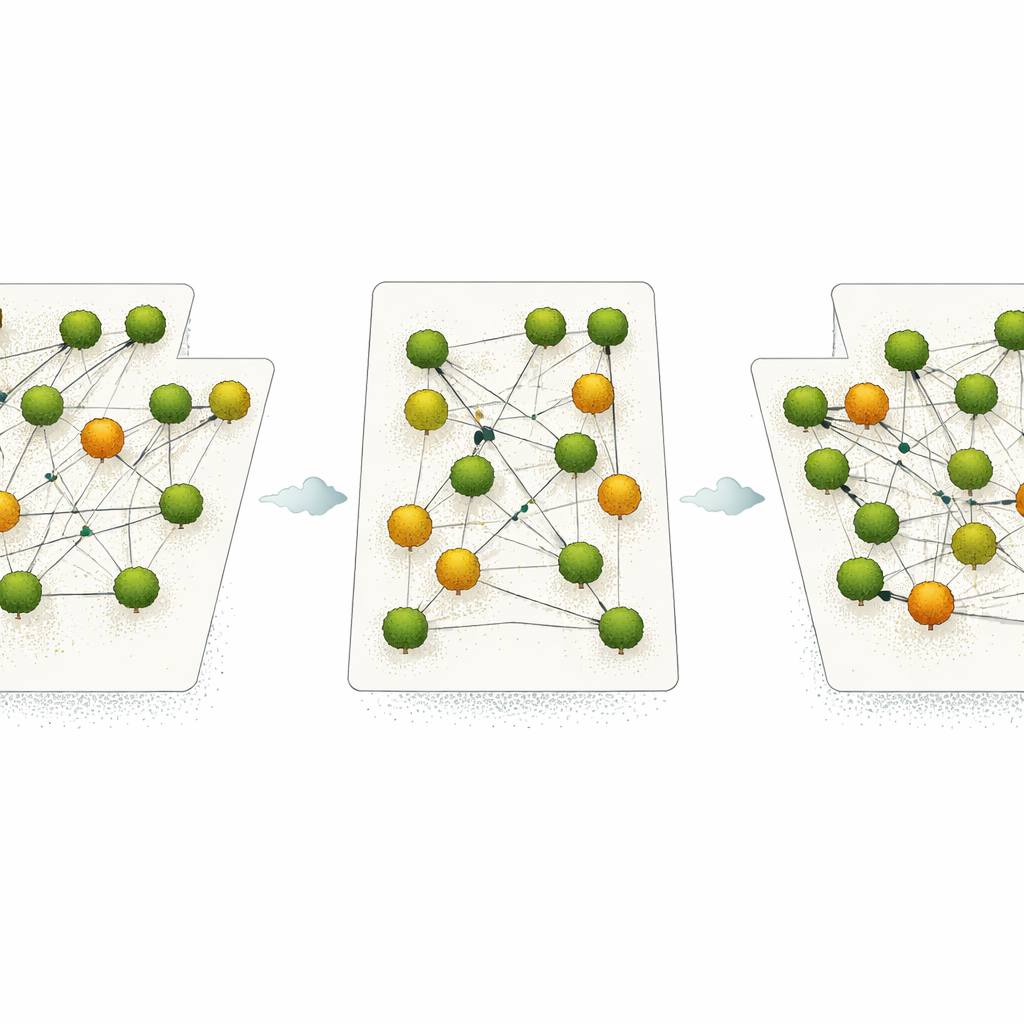
Het nieuwe raamwerk begint met het scheiden van grond en vegetatie in elke LiDAR‑strook en het opbouwen van gedetailleerde hoogtemodellen van terrein en kruin. Hiervan uitgaand identificeert de software de toppen van individuele bomen en behandelt elke boom als een knooppunt in een netwerk. Voor iedere boom registreert het hoe ver naburige bomen op de grond verwijderd zijn, hoeveel ze in hoogte verschillen, en hoe ze ten opzichte van elkaar boven of onder liggen. Deze eenvoudige ruimtelijke relaties vormen een soort vingerafdruk voor de buurt van elke boom. De methode vergelijkt vervolgens bomen tussen overlappende stroken en zoekt naar de beste één‑op‑één koppelingsoplossing van bomen die het algemene patroon van afstand en hoogte behoudt. Deze matchingstap wordt opgelost met een rigoureus algoritme dat oorspronkelijk is ontworpen om biologische sequenties uit te lijnen, waardoor de meest consistente set boomovereenkomsten over het hele perceel wordt gekozen.
De pasvorm in drie dimensies verfijnen
Het vinden van overeenkomende bomen is slechts de helft van de taak; de scans moeten nog worden geroteerd en verschoven zodat corresponderende bomen op dezelfde plek in 3D‑ruimte terechtkomen. Hiervoor gebruiken de auteurs een optimalisatiebenadering geïnspireerd op het zwermgedrag van vogels, bekend als particle swarm optimization. Veel proefoplossingen, elk representerend een andere combinatie van rotaties en verschuivingen, bewegen zich door de zoekruimte en worden geleid naar de configuratie die overeenkomende bomen zo dicht mogelijk bij elkaar brengt terwijl duidelijke uitbijters worden genegeerd. Dit proces levert een precieze, volledige driedimensionale transformatie op die één LiDAR‑strook op een andere uitlijnt zonder te vertrouwen op externe markeringen of hoogwaardige satellietpositionering, wat het bijzonder nuttig maakt in bossen waar navigatiesignalen onbetrouwbaar zijn.
Hoe goed werkt het in echte bossen?
Het team testte hun methode in een kustbospark in zuidoost‑China, met gegevens van acht circulaire percelen die verschillende boomsoorten, leeftijden en stamdichtheden vertegenwoordigden. Parcellen bevatten populier, dawn redwood, grove den en andere soorten, met dichte loof‑aan kruinen en zeer hoge LiDAR‑puntdichtheden. Na registratie waren de typische afstandsfouten tussen gematchte bomen slechts enkele tientallen centimeters, met root‑mean‑square‑afwijkingen zo laag als ongeveer 17–27 cm afhankelijk van de soort. Het aandeel correct gekoppelde bomen nam met ongeveer 17–27 procent toe vergeleken met een veelgebruikte basismethode, en verbeteringen waren vooral sterk in stands met duidelijke, goed gescheiden kroonstructuren zoals dawn redwood. Dichte loofbossen met overlappende kruinen bleven uitdagend, wat aangeeft waar betere boomsegmentatiegereedschappen in de toekomst nodig zullen zijn.
Wat dit betekent voor bosmonitoring
Door bomen te behandelen als punten in een netwerk in plaats van als geïsoleerde objecten, biedt dit raamwerk een robuuste, doel‑loze manier om meerdere UAV‑LiDAR‑scans tot één samenhangend 3D‑beeld van het bos te rijgen. Voor niet‑specialisten is de kernboodschap dat we herhaalde dronesurveys van bossen nu nauwkeuriger kunnen samenvoegen, zelfs waar satellietsignalen zwak zijn en de grond door loof verborgen is. Dit niveau van uitlijning is goed geschikt voor het in kaart brengen van kruinstructuur, het volgen van bosgroei en het ondersteunen van biodiversiteits‑ en koolstofopslagstudies, hoewel het nog niet precies genoeg is voor millimeternauwkeurige taken zoals gedetailleerde stammetingen. Naarmate drones en laserscanners gebruikelijker worden in de bosbouw, zullen methoden zoals deze helpen om uitgestrekte wolken van laserpunten om te zetten in betrouwbare, vergelijkbare kaarten die onthullen hoe bossen in de loop van de tijd veranderen.
Bronvermelding: Fekry, R., Ali, E., Sani-Mohammed, A. et al. Target-less registration of UAV-LiDAR point clouds based on graph matching of tree locations in forest environments. Sci Rep 16, 12373 (2026). https://doi.org/10.1038/s41598-025-29590-2
Trefwoorden: UAV LiDAR, boskartering, puntwolkregistratie, boomdetectie, remote sensing