Clear Sky Science · fr
Enregistrement sans cibles de nuages de points UAV‑LiDAR basé sur l’appariement par graphe des emplacements d’arbres en milieu forestier
Pourquoi il est important d’aligner les vues laser des forêts
Les forêts stockent du carbone, abritent la faune et contribuent à la régulation du climat, mais mesurer leur structure arbre par arbre sur de vastes superficies reste difficile. De petits drones équipés de scanners laser (UAV‑LiDAR) peuvent cartographier les forêts avec un niveau de détail remarquable, mais leurs données sont acquises le long de trajectoires de vol qui se recoupent et qui ne s’alignent souvent pas parfaitement, en particulier sous des voiles forestiers denses où les signaux de navigation par satellite sont faibles. Cette étude présente une méthode pour faire correspondre proprement ces balayages laser superposés en utilisant les arbres eux‑mêmes comme points de référence naturels, sans recourir à des cibles artificielles au sol.
Voir la forêt avec des lasers volants
Les relevés forestiers modernes reposent de plus en plus sur le LiDAR, une technologie qui émet des impulsions lumineuses et mesure le temps qu’elles mettent à revenir. Monté sur des drones, le LiDAR peut capturer la forme des houppiers, des branches et des surfaces du sol avec une résolution centimétrique. Cependant, un drone suit typiquement de longs parcours parallèles, générant des bandes de nuages de points qui devraient se chevaucher comme des tuiles sur un toit. De petites erreurs de navigation, le masquage par le couvert et les terrains vallonnés font que ces bandes correspondent rarement parfaitement. Les méthodes classiques d’alignement cherchent des zones de sol plat ou des caractéristiques géométriques simples, souvent rares ou invisibles dans les forêts réelles. Les auteurs se concentrent plutôt sur quelque chose à la fois abondant et écologiquement pertinent : la répartition des arbres individuels.
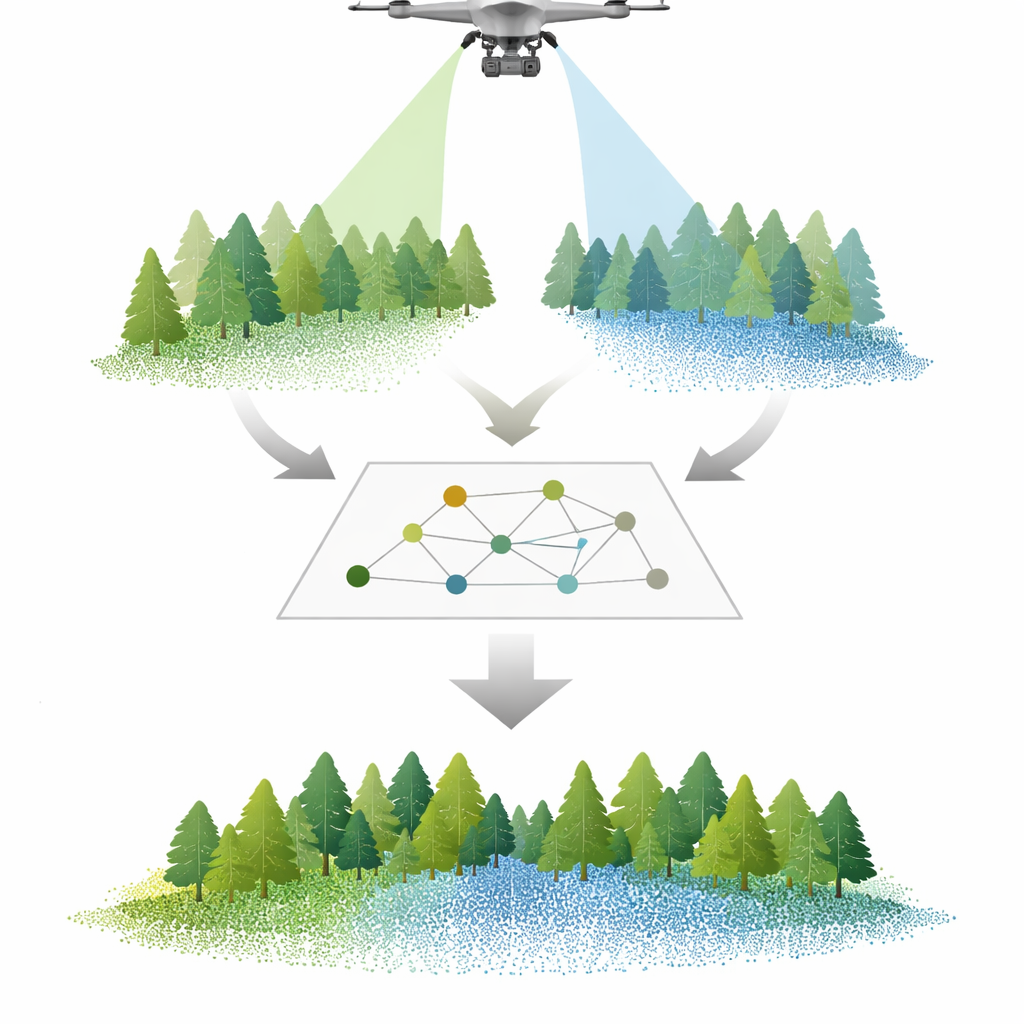
Utiliser les arbres comme un réseau naturel d’ancrages
Le nouveau cadre commence par séparer le sol et la végétation dans chaque bande LiDAR et par construire des modèles de hauteur détaillés du terrain et du couvert. À partir de ces données, le logiciel repère les cimes des arbres individuels et considère chaque arbre comme un nœud d’un réseau. Pour chaque arbre, il enregistre la distance au sol jusqu’à ses voisins, leurs différences de hauteur et leur position relative (au‑dessus ou au‑dessous les uns des autres). Ces relations spatiales simples forment une sorte d’empreinte pour le voisinage de chaque arbre. La méthode compare ensuite les arbres entre bandes superposées, cherchant la meilleure correspondance un à un qui préserve le motif global d’espacement et de hauteurs. Cette étape d’appariement est résolue avec un algorithme rigoureux conçu à l’origine pour aligner des séquences biologiques, garantissant que l’ensemble le plus cohérent de correspondances d’arbres est choisi pour l’ensemble de la parcelle.
Ajuster précisément l’alignement en trois dimensions
Trouver des arbres correspondants n’est que la moitié du travail ; les balayages doivent encore être tournés et décalés pour que les arbres appariés coïncident dans l’espace 3D. Pour cela, les auteurs utilisent une approche d’optimisation inspirée du comportement en groupe des oiseaux, connue sous le nom d’optimisation par essaim de particules. De nombreuses solutions tests, chacune représentant une combinaison différente de rotations et de translations, évoluent dans l’espace de recherche, guidées vers l’arrangement qui rapproche au maximum les arbres appariés tout en ignorant les évidents points aberrants. Ce processus fournit une transformation tridimensionnelle précise qui aligne une bande LiDAR sur une autre sans dépendre de repères externes ou d’un positionnement satellitaire de haute qualité, ce qui est particulièrement utile en forêt où les signaux de navigation sont peu fiables.
Quelle est son efficacité en conditions réelles ?
L’équipe a testé sa méthode dans un parc forestier côtier du sud‑est de la Chine, en utilisant des données de huit placettes circulaires représentant différentes espèces, âges et densités de tiges. Les placettes comprenaient peupliers, métaséquoias, pins sylvestres et d’autres espèces, avec des houppiers feuillus denses et des densités de points LiDAR très élevées. Après l’enregistrement, les erreurs d’espacement typiques entre arbres appariés n’étaient que de quelques dizaines de centimètres, avec des écarts quadratiques moyens (RMS) aussi faibles qu’environ 17–27 cm selon l’espèce. La proportion d’arbres correctement appariés a augmenté d’environ 17–27 % par rapport à une méthode de référence largement utilisée, et les améliorations ont été particulièrement marquées dans les peuplements aux houppiers distincts et bien séparés comme le métaséquoia. Les peuplements feuillus denses aux houppiers chevauchants sont restés plus difficiles, pointant les zones où de meilleurs outils de segmentation d’arbres seront nécessaires à l’avenir.
Ce que cela signifie pour la surveillance forestière
En traitant les arbres comme des points d’un réseau plutôt que comme des objets isolés, ce cadre offre une manière robuste et sans cibles d’aligner plusieurs balayages UAV‑LiDAR en une vue 3D cohérente de la forêt. Pour un public non spécialiste, le message clé est que l’on peut désormais assembler des relevés répétés par drone de manière plus précise, même là où les signaux satellitaires sont faibles et le sol caché sous le feuillage. Ce niveau d’alignement convient bien pour cartographier la structure du couvert, suivre la croissance forestière et soutenir les études sur la biodiversité et le stockage du carbone, bien qu’il ne soit pas encore suffisant pour des tâches au milli‑mètre près comme des mesures détaillées de la tige. À mesure que les drones et les scanners laser se généralisent en sylviculture, des méthodes comme celle‑ci aideront à transformer d’immenses nuages de points laser en cartes fiables et comparables qui révèlent comment les forêts évoluent au fil du temps.
Citation: Fekry, R., Ali, E., Sani-Mohammed, A. et al. Target-less registration of UAV-LiDAR point clouds based on graph matching of tree locations in forest environments. Sci Rep 16, 12373 (2026). https://doi.org/10.1038/s41598-025-29590-2
Mots-clés: UAV LiDAR, cartographie forestière, enregistrement de nuages de points, détection d’arbres, télédétection