Clear Sky Science · ru
Регистрация облаков точек UAV‑LiDAR без опорных мишеней на основе сопоставления графов местоположений деревьев в лесной среде
Почему важно сводить воедино лазерные обзоры лесов
Леса аккумулируют углерод, служат убежищем для дикой природы и помогают регулировать климат, однако измерить их структуру по каждому дереву на больших территориях сложно. Малые беспилотники с лазерными сканерами (UAV‑LiDAR) способны картировать леса с впечатляющей детализацией, но их данные собираются вдоль перекрывающихся трасс полета, которые часто не стыкуются точно, особенно под густыми кронами, где спутниковые навигационные сигналы ослаблены. В этом исследовании предлагается способ аккуратно «пришить» перекрывающиеся лазерные сканы друг к другу, используя сами деревья как естественные опорные точки, без необходимости размещать искусственные метки на земле.
Видеть лес с помощью летающих лазеров
Современные лесные обследования всё чаще опираются на LiDAR — технологию, посылающую импульсы света и измеряющую время их возврата. Установленный на дроне LiDAR фиксирует форму вершинок деревьев, ветвей и поверхности почвы с разрешением сантиметров. Однако дрон обычно летит по длинным параллельным трассам, создавая полосы облаков точек, которые должны перекрываться, как черепица на крыше. Небольшие навигационные ошибки, закрытие кронами и пересечённый рельеф означают, что эти «плитки» редко совпадают идеально. Традиционные методы выравнивания ищут ровные участки почвы или простые геометрические особенности, которые в настоящем лесу редки или скрыты. Авторы вместо этого сосредотачиваются на том, что одновременно обильно и экологически значимо: на рисунке отдельных деревьев.
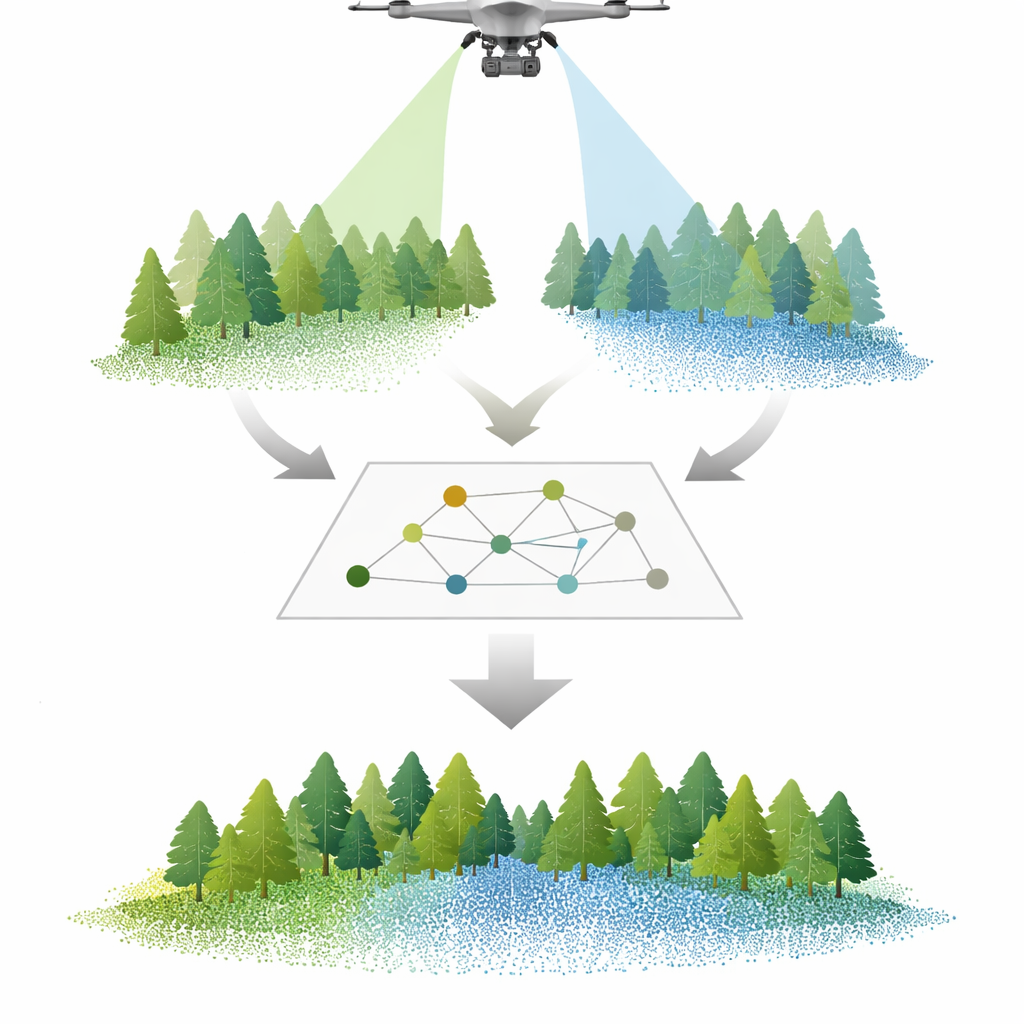
Использование деревьев как естественной сети якорей
Новая схема начинается с разделения почвы и растительности в каждой полосе LiDAR и построения детализированных моделей высоты рельефа и кроны. На их основе программное обеспечение выявляет вершины отдельных деревьев и рассматривает каждое дерево как узел в сети. Для каждого дерева фиксируется расстояние до соседей по земле, разница в высоте и взаимное расположение выше или ниже друг друга. Эти простые пространственные отношения формируют своего рода отпечаток для окружения каждого дерева. Метод затем сравнивает деревья между перекрывающимися полосами, ищет наилучшее попарное сопоставление деревьев, сохраняющее общий паттерн расстояний и высот. Шаг сопоставления решается с помощью строгого алгоритма, изначально разработанного для выравнивания биологических последовательностей, что обеспечивает выбор наиболее последовательного набора соответствий деревьев по всему участку.
Тонкая подгонка в трёх измерениях
Найти соответствующие деревья — только половина задачи; сканы всё ещё нужно повернуть и сдвинуть так, чтобы соответствующие деревья совпали в 3D-пространстве. Для этого авторы используют оптимизационный подход, вдохновлённый стайным поведением птиц, известный как рой частиц (particle swarm optimization). Множество пробных решений, каждое представляющее разные комбинации поворотов и смещений, перемещается по пространству поиска, направляемое к расположению, которое сводит соответствующие деревья как можно ближе, игнорируя явные выбросы. Этот процесс даёт точную, полную трёхмерную трансформацию, выравнивающую одну полосу LiDAR с другой без опоры на внешние метки или высококачественное спутниковое позиционирование, что делает метод особенно полезным в лесах с ненадёжными навигационными сигналами.
Насколько хорошо это работает в реальных лесах?
Команда протестировала метод в прибрежном лесном парке на юго‑востоке Китая, используя данные с восьми круглых участков, представляющих разные виды деревьев, возраст и плотность стволов. На участках были тополь, метасеквойя (dawn redwood), шотландская сосна и другие виды, с густыми лиственными кронами и очень высокой плотностью точек LiDAR. После регистрации типичные погрешности расстояния между сопоставленными деревьями составили всего несколько десятков сантиметров, со среднеквадратичными смещениями порядка примерно 17–27 см в зависимости от вида. Доля правильно сопоставленных деревьев увеличилась примерно на 17–27 процентов по сравнению с широко используемым базовым методом, а улучшения особенно заметны в насаждениях с отчетливыми, хорошо разделёнными кронами, таких как метасеквойя. Плотные лиственные насаждения с перекрывающимися кронами по‑прежнему представляют сложность, что показывает, где в будущем потребуются более совершенные инструменты сегментации деревьев.
Что это означает для мониторинга лесов
Рассматривая деревья как точки в сети, а не как изолированные объекты, эта схема предлагает надёжный способ без мишеней сводить несколько UAV‑LiDAR сканов в единое согласованное 3D‑представление леса. Для неспециалистов главное послание в том, что теперь мы можем точнее сшивать повторные дроновые обследования лесов, даже там, где спутниковые сигналы слабы, а почва скрыта под листвой. Такой уровень выравнивания хорошо подходит для картирования структуры кроны, отслеживания роста лесов и поддержки исследований биоразнообразия и накопления углерода, хотя пока он недостаточно точен для задач миллиметровой точности, например, детальных измерений стволов. По мере того как дроны и лазерные сканеры становятся всё более распространёнными в лесном деле, подобные методы помогут превратить огромные облака лазерных точек в надёжные сопоставимые карты, показывающие, как меняются леса со временем.
Цитирование: Fekry, R., Ali, E., Sani-Mohammed, A. et al. Target-less registration of UAV-LiDAR point clouds based on graph matching of tree locations in forest environments. Sci Rep 16, 12373 (2026). https://doi.org/10.1038/s41598-025-29590-2
Ключевые слова: UAV LiDAR, картирование лесов, регистрация облаков точек, обнаружение деревьев, дистанционное зондирование