Clear Sky Science · zh
用于温和、可适应、多尺度操作的液态金属通用抓手
像活细胞一样流动的软体机器人
想象一种机器人手,能够用同一个微小装置轻柔地拾起蒲公英种子、活鱼、一粒灰尘以及一块沉重的水果——并且能在水中、酸性环境或空气中完成。这项研究正是提出了这样的装置:一种由液态金属制成的“通用抓手”,它像变形虫一样流动和重塑自己,使机器能够处理那些对当今机器人而言过于脆弱、过小或形状奇特的物体。
为什么温和抓取如此困难
传统机器手擅长抓取坚固、规则的物品,如箱子或工具,但在处理易碎、柔软或微小目标时常常力不从心。多指机械手可能会压碎脆弱物体或错过微小目标。那些通过包裹软囊或利用颗粒堵塞(jamming)来适应形状的抓手,虽然能调形,但通常需要体积庞大的泵或加热装置,仍然难以稳固夹持快速移动的生物或极小部件。基于粘附的工具可拾取微小芯片或纤维,但常在释放时难以控制。在工厂、实验室和生物研究中,这留下了一个重大空白:如何在广泛的尺寸范围和各种环境下,既能抓住又能干净地释放从活体到微器件的一切物品。
借鉴变形虫的技巧
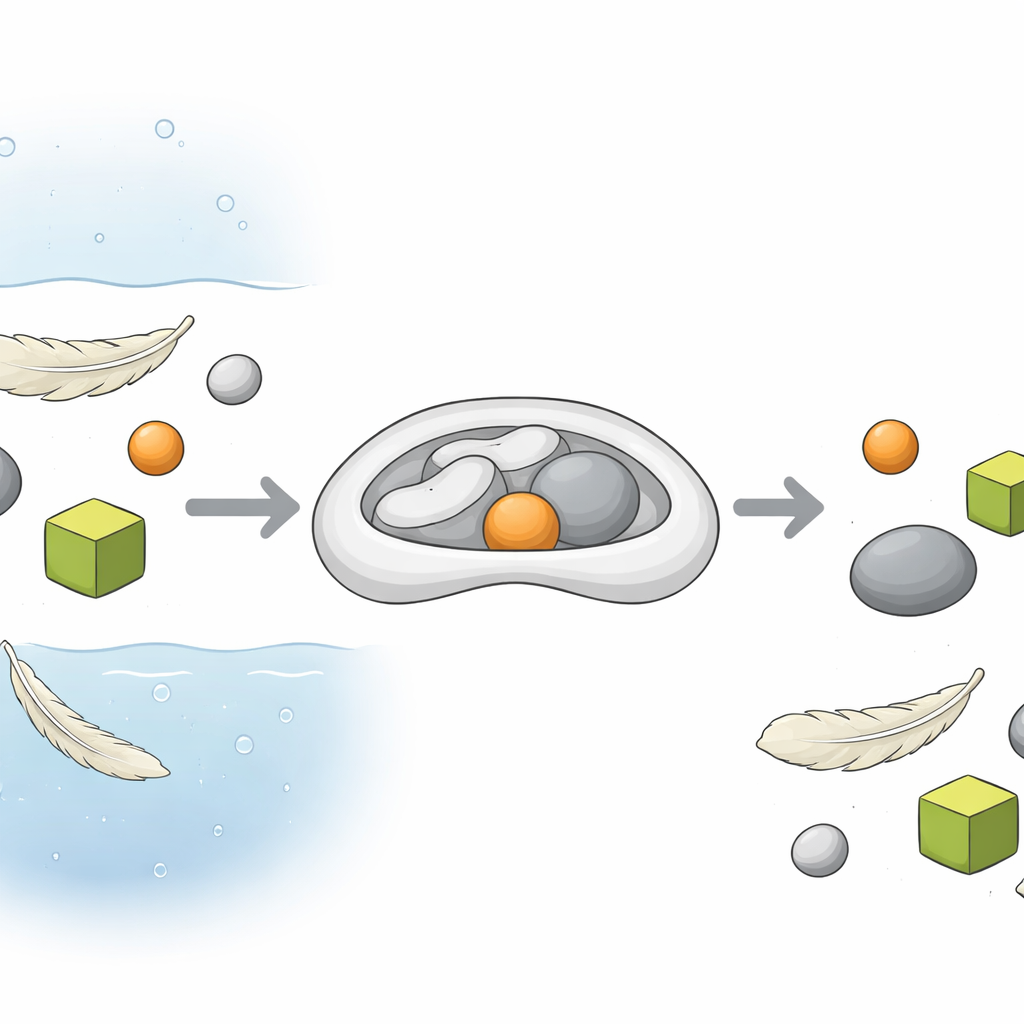
变形虫等单细胞生物以一种非常柔软的流体状体态解决了这一问题。它们围绕猎物流动、包裹并随后挤出。研究人员使用基于镓的液态金属混入微小铁颗粒来模拟这种策略。在室温下这些金属保持液态,但当施加小电压时,其表面张力可发生显著变化。在新的液态金属通用抓手中,一滴液态金属置于软质3D打印腔体内,并与一层薄薄的咸水液膜接触。当团队施加电信号时,金属的表面张力几乎消失,液滴铺展开来,包裹附近的任何物体——无论是玻璃珠、扭曲的贝壳,还是活的蠕虫——都能在液体和空气中被包裹。
从柔性流动到强力抓持
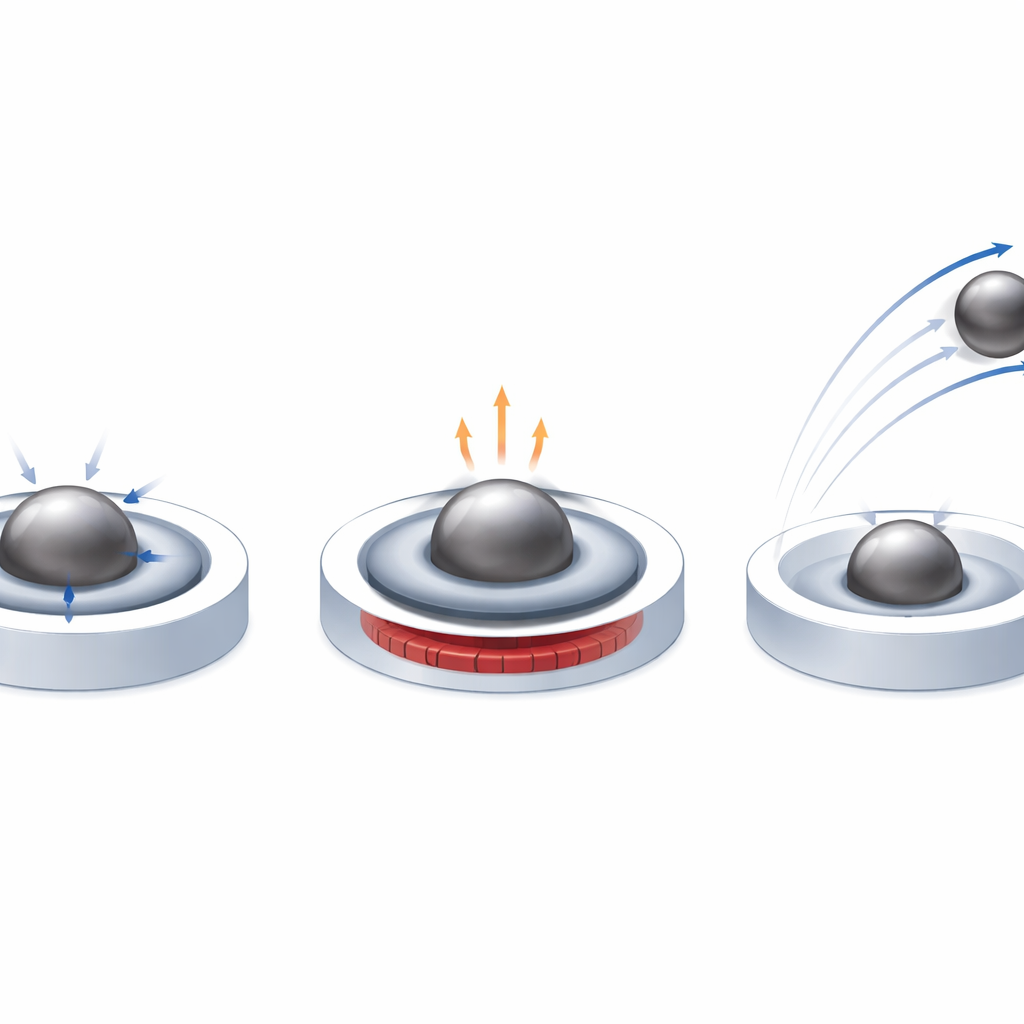
为了将这种流动的液滴转变为牢固的“手”,该装置利用了磁性。由于金属中含有铁颗粒,在腔体下方开启电磁线圈会使流体表现得更像软固体。被包裹的金属随后与物体表面相互咬合,从而提供惊人的抓持力。该抓手可夹持约200克的物体——如甜椒、橙子或西兰花——同时仍能在毫米尺度上工作。更小版本尤其高效,其可承载的有效载荷超过其所含液态金属质量的一千倍以上。与此同时,接触压力可保持在约10帕左右,远低于会损伤豆腐、果冻状藻类或许多小动物的压力,使其非常温和。
极速释放
释放微小物体往往比抓取更困难,因为不可见的力如粘附力和表面张力会使它们粘在一起。在这里,同样的液态金属提供了内建的解决方案。通过切换电信号,金属的表面张力迅速恢复到很高的数值。液滴收缩,类似于突然松手的拉伸橡皮筋,将所抓物体甩开。实验表明,一根人类头发或微小颗粒可在几千分之一秒内被发射,达到约42倍重力的加速度——比任何已报道的抓手都要快。重要的是,研究人员可以通过调节电压来控制释放速度,在处理特别脆弱的样本时在力量与安全之间进行权衡。
在不伤害生物的情况下处理生命体
为测试如此剧烈的动作是否对活组织安全,研究团队用该抓手移动斑马鱼早期胚胎——这些微小而敏感的球体常用于生物学实验。与常规移液器相比,液态金属工具工作更快且成功率更高,而胚胎在发育过程中并未显示额外的应激迹象、畸形或运动受损。该抓手还在未见明显伤害的情况下捕获了快速移动的蟑螂、蠕动的蚯蚓和滑溜的小鱼,暗示其在生态学、养殖业和生物医学研究中具有潜在用途,在这些领域精确而温和的操作至关重要。
一种新型的通用机器人触觉
该研究表明,通过控制液态金属液滴的流动、变硬和迅速回缩,一个装置即可抓取并主动释放跨越约14个数量级的重量物体,从微小颗粒到日常农产品,并能在空气、海水、碱性或酸性溶液中工作。对于非专业读者来说,关键信息是:机器人不再需要为每项任务配备不同的“手”。一种类似变形虫的液态金属通用抓手,未来可能让机器安全地与从活细胞到脆弱电子设备的各种对象互动,为工业和医疗带来更具适应性、温和且精确的触觉。
引用: Chen, X., Zhang, M., Cao, L. et al. Liquid metal universal grippers for gentle, adaptable, multiscale manipulation. Nat Commun 17, 3548 (2026). https://doi.org/10.1038/s41467-026-70313-6
关键词: 软体机器人, 液态金属, 通用抓手, 微尺度操作, 生物医学处理