Clear Sky Science · ja
やわらかく、適応し、多スケールに操る液体金属ユニバーサルグリッパー
生きた細胞のように流れるソフトロボット
想像してみてください。タンポポの綿毛、泳ぐ魚、ちり一粒、そして重い果物――これらをすべて同じ小さな装置でやさしくつかめるロボットの手があるとします。しかもその手は水中、酸性環境、あるいは空気中でも動作します。本研究はまさにそれを実現します。アメーバのように流動して形を変える液体金属から作られた「ユニバーサルグリッパー」で、従来のロボットでは扱えなかった脆弱なもの、小さすぎるもの、奇妙な形状のものを機械が扱えるようにします。
なぜやさしく掴むのは難しいのか
従来のロボットハンドは、箱や工具のような頑丈で規則的な物体をつかむのは得意ですが、繊細で柔らかい対象や微小な対象には苦戦します。多指ハンドは壊れやすい物を押しつぶしたり、非常に小さなものを取り逃がしたりします。柔らかい袋で対象を包むグリッパーや粒子を詰めて形を合わせる方式は適応性がありますが、多くの場合かさばるポンプや加熱装置が必要で、迅速に動く生物や非常に小さな部品を確実に保持することはできません。粘着ベースのツールは微小なチップや繊維を拾えますが、意図的に離すのが難しいことが多い。工場や研究室、生物学の現場では、これが大きな空白を生んでいます。生物からマイクロデバイスまで、非常に広いサイズ範囲とさまざまな環境で「掴んでからきれいに放す」方法が必要です。
アメーバからの着想
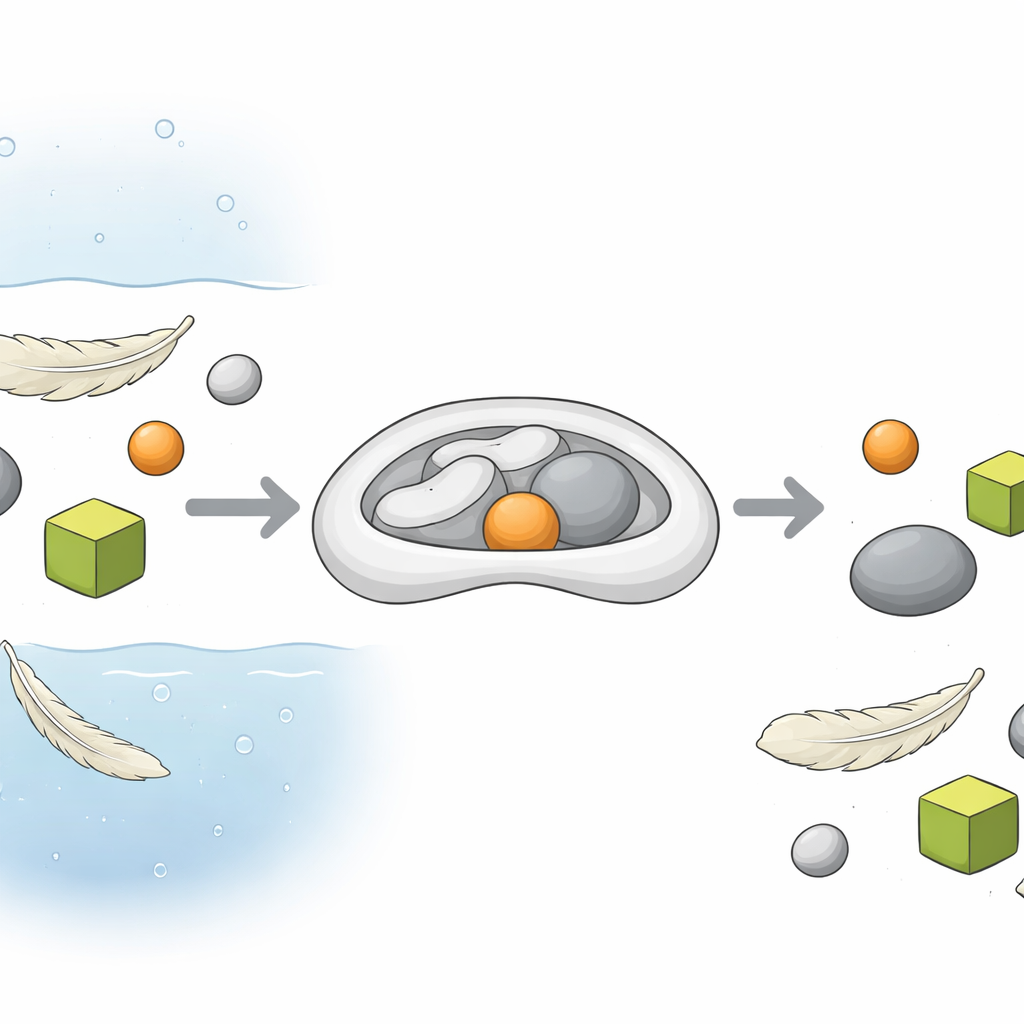
アメーバのような単細胞生物は、非常に柔らかい流体のように振る舞う体でこの問題を解決します。彼らは獲物のまわりを流れて包み込み、のちに絞り出します。研究者たちはこの戦略を、微小な鉄粒子を混ぜたガリウム系液体金属の滴で模倣しました。常温で液体のままでありながら、わずかな電圧を加えると表面張力が劇的に変化します。新しい液体金属ユニバーサルグリッパーでは、液滴が柔らかい3Dプリントの空洞内に収まり、薄い塩水層と接しています。電気信号を与えると金属の表面張力がほぼ消失し、広がって周囲の物体――ガラス玉、ねじれた貝殻、生きたミミズのようなもの――を包み込みます。これらは液中でも空気中でも機能します。
やわらかな流動から強い把持へ
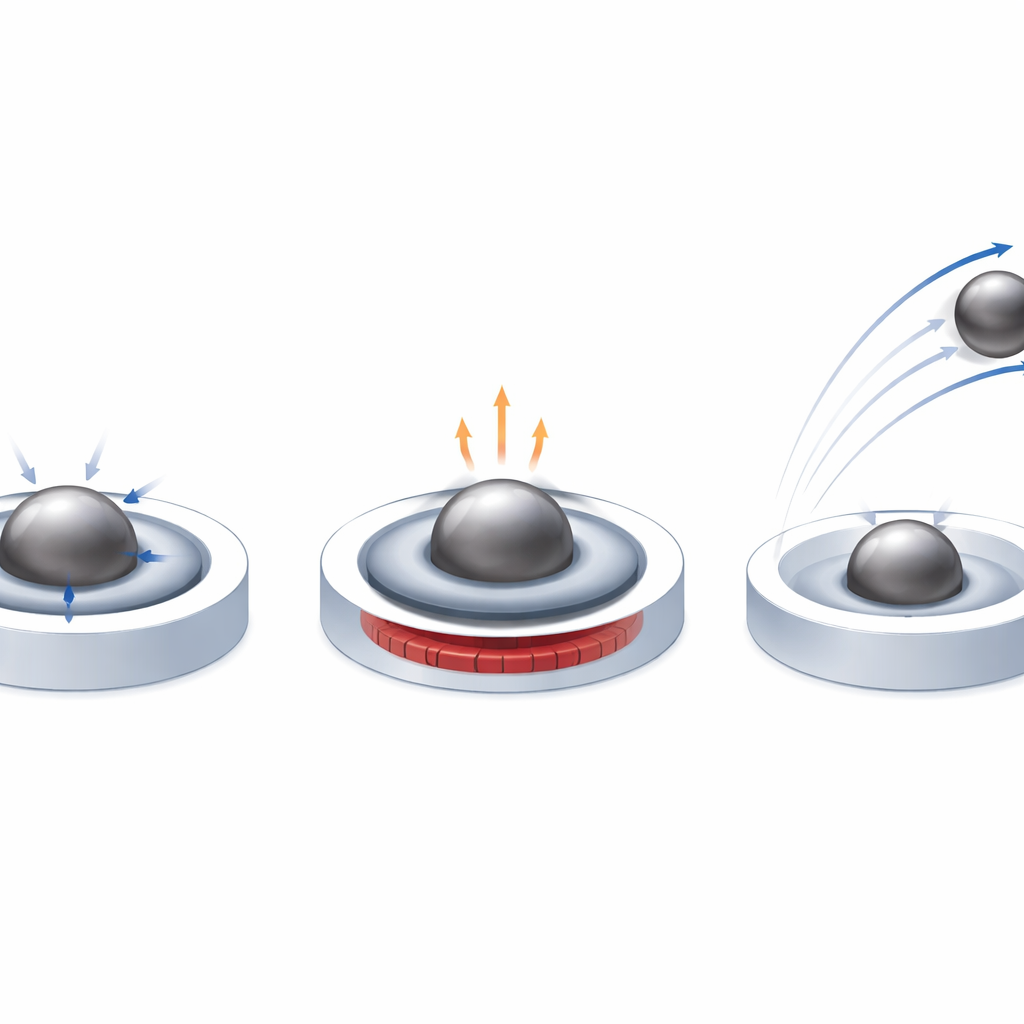
この流動する液滴を確かな手に変えるために、装置は磁力を利用します。金属に鉄粒子が含まれているため、空洞の下にある電磁コイルをオンにすると流体は柔らかい固体のように振る舞います。包み込まれた金属は対象の表面と噛み合い、驚くべき保持力を生み出します。グリッパーはピーマン、オレンジ、ブロッコリーといった約200グラムまでの物体をつかむことができる一方で、ミリメートルスケールでも機能します。小型版は特に効率的で、内部の液体金属の質量の千倍以上の搭載量を支えられます。同時に接触圧は約10パスカル程度まで低く抑えられ、豆腐やゼリー状の藻類、多くの小動物を損なうことなく扱えるほど非常にやさしいのです。
瞬時の解放
微小な物体を放すのはつかむより難しいことが多く、粘着力や表面張力といった目に見えない力がそれらを引き止めます。ここでも液体金属が自ずと解決策を提供します。電気信号を切り替えることで金属の表面張力は非常に高い値に急戻りします。液滴は縮み、伸ばされたゴムバンドが突然戻るように、つかんでいたものをはじき飛ばします。実験ではヒトの毛髪や微小粒子が数千分の数秒で発射され、最大で地球重力の約42倍の加速度に達しました。これは報告されたグリッパーの中で最も速い部類に入ります。重要な点は、研究者が電圧を調整することでこの放出速度を制御でき、特に壊れやすい試料を扱う際に力を抑えて安全性を高められることです。
生体を損なうことなく扱う
こうした劇的な動作が生体組織に安全かどうかを試すため、研究チームは初期のゼブラフィッシュ胚(生物学実験でよく使われる小さく敏感な球状試料)をこのグリッパーで移動させました。標準的なピペットと比較して、液体金属ツールはより速く、成功率も高かったが、胚の発生過程においてストレスや奇形、運動障害の増加は見られませんでした。グリッパーはまたすばしっこいゴキブリ、もぞもぞ動くミミズ、滑りやすい幼魚も目立った損傷なく捕らえられ、精密かつやさしい取り扱いが求められる生態学、養殖学、生命科学の分野での将来用途を示唆します。
新しい種類のユニバーサルなロボットの触覚
研究は、液体金属の液滴がどう流れ、硬化し、そして再び弾けるかを制御することで、1つの装置が重量でおよそ14桁にわたる対象――微小なビーズから日常の農産物まで――を空気中、海水、アルカリ性や酸性の溶液中で把持し能動的に放すことができることを示しました。専門外の人にとっての要点は、もはや用途ごとに別々の手をロボットに用意する必要がない、ということです。アメーバのような液体金属グリッパーがいつか、細胞から壊れやすい電子機器まであらゆるものと安全にやり取りできるようになり、産業と医療の両方により適応性が高く、やさしく、精密な触覚をもたらす可能性があるのです。
引用: Chen, X., Zhang, M., Cao, L. et al. Liquid metal universal grippers for gentle, adaptable, multiscale manipulation. Nat Commun 17, 3548 (2026). https://doi.org/10.1038/s41467-026-70313-6
キーワード: ソフトロボティクス, 液体金属, ユニバーサルグリッパー, マイクロスケール操作, 生体処理