Clear Sky Science · it
Pinze universali in metallo liquido per una manipolazione delicata, adattabile e su più scale
Un robot morbido che scorre come una cellula vivente
Immaginate una mano robotica capace di raccogliere con delicatezza un seme di tarassaco, un pesce vivo, un granello di polvere e un pezzo di frutta pesante, tutto con lo stesso piccolo dispositivo—e di farlo sott’acqua, in ambiente acido o all’aria aperta. Questo studio presenta esattamente questo: una “pinza universale” fatta di metallo liquido che scorre e si rimodella come un’ameba, permettendo alle macchine di maneggiare oggetti troppo fragili, troppo piccoli o dalla forma troppo irregolare per i robot odierni.
Perché afferrare in modo delicato è così difficile
Le mani robotiche convenzionali sono ottime nel prender punti solidi e regolari, come scatole o utensili, ma faticano con bersagli delicati, morbidi o microscopici. Mani multi-dita possono schiacciare oggetti fragili o mancare quelli minuscoli. Pinze che avvolgono gli oggetti in sacchi morbidi o che usano grani che si incastrano possono adattarsi alla forma, ma spesso richiedono pompe o riscaldatori ingombranti e comunque non riescono a trattenere in sicurezza creature in rapido movimento o componenti molto piccoli. Strumenti basati su adesivi possono raccogliere chip microscopici o fibre, ma hanno difficoltà a rilasciare su comando. In fabbriche, laboratori e ricerche biologiche esiste quindi un grande vuoto: come afferrare e poi rilasciare in modo pulito tutto, dagli organismi viventi ai microdispositivi, su una gamma enorme di dimensioni e in ambienti molto diversi.
Prendere in prestito un trucco dalle amebe
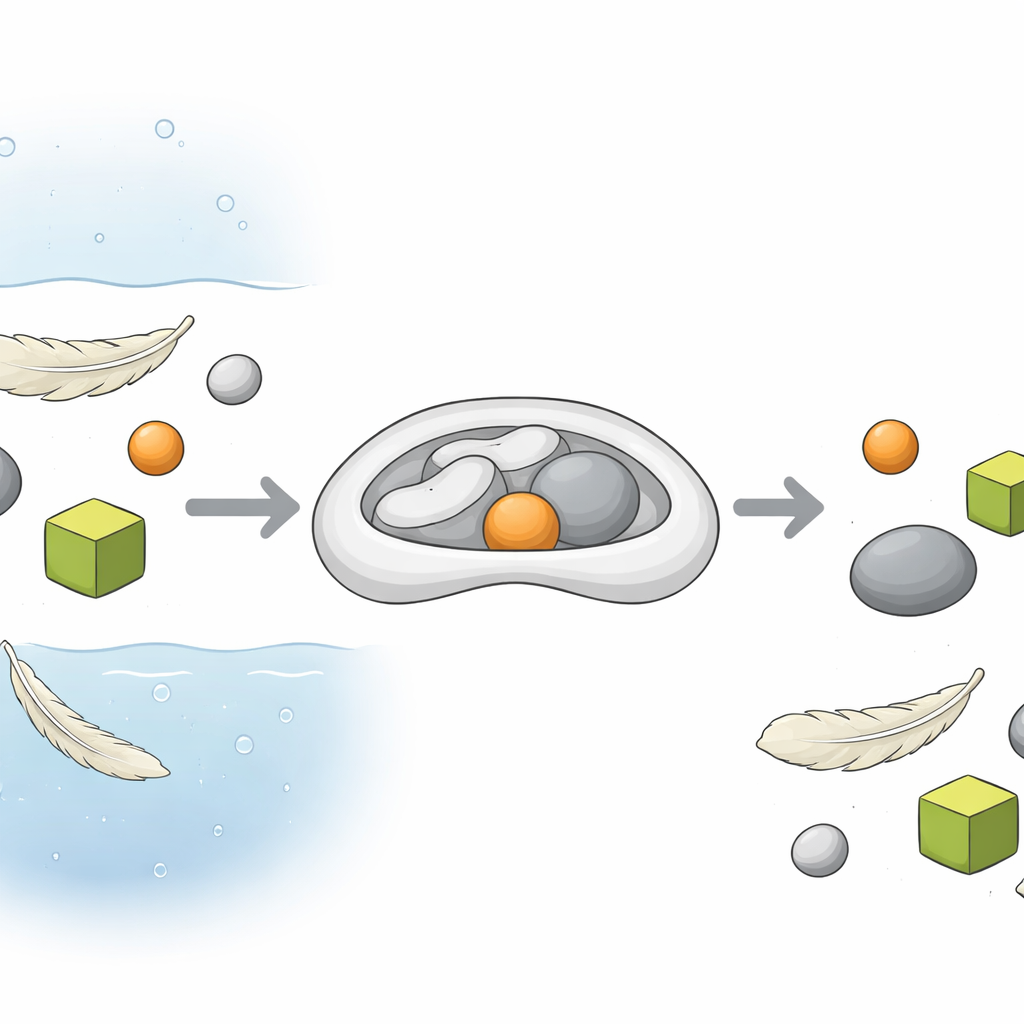
Le amebe, organismi unicellulari, risolvono questo problema con un corpo che si comporta come un fluido molto morbido. Scorrono attorno alla preda, la avvolgono e poi la espellono. I ricercatori imitano questa strategia usando gocce di metallo liquido a base di gallio miscelate con piccole particelle di ferro. A temperatura ambiente questi metalli restano liquidi, ma possono cambiare drasticamente quanto la loro superficie tende a ritirarsi quando viene applicata una piccola tensione elettrica. Nella nuova pinza universale in metallo liquido, una goccia è contenuta in una cavità morbida stampata in 3D, a contatto con uno strato sottile di liquido salino. Quando il team applica un segnale elettrico, la tensione superficiale del metallo quasi scompare e si espande, avvolgendo qualsiasi oggetto si trovi vicino—che sia una sfera di vetro, una conchiglia contorta o un verme vivente—sia nei liquidi sia in aria.
Dal flusso morbido a una presa forte
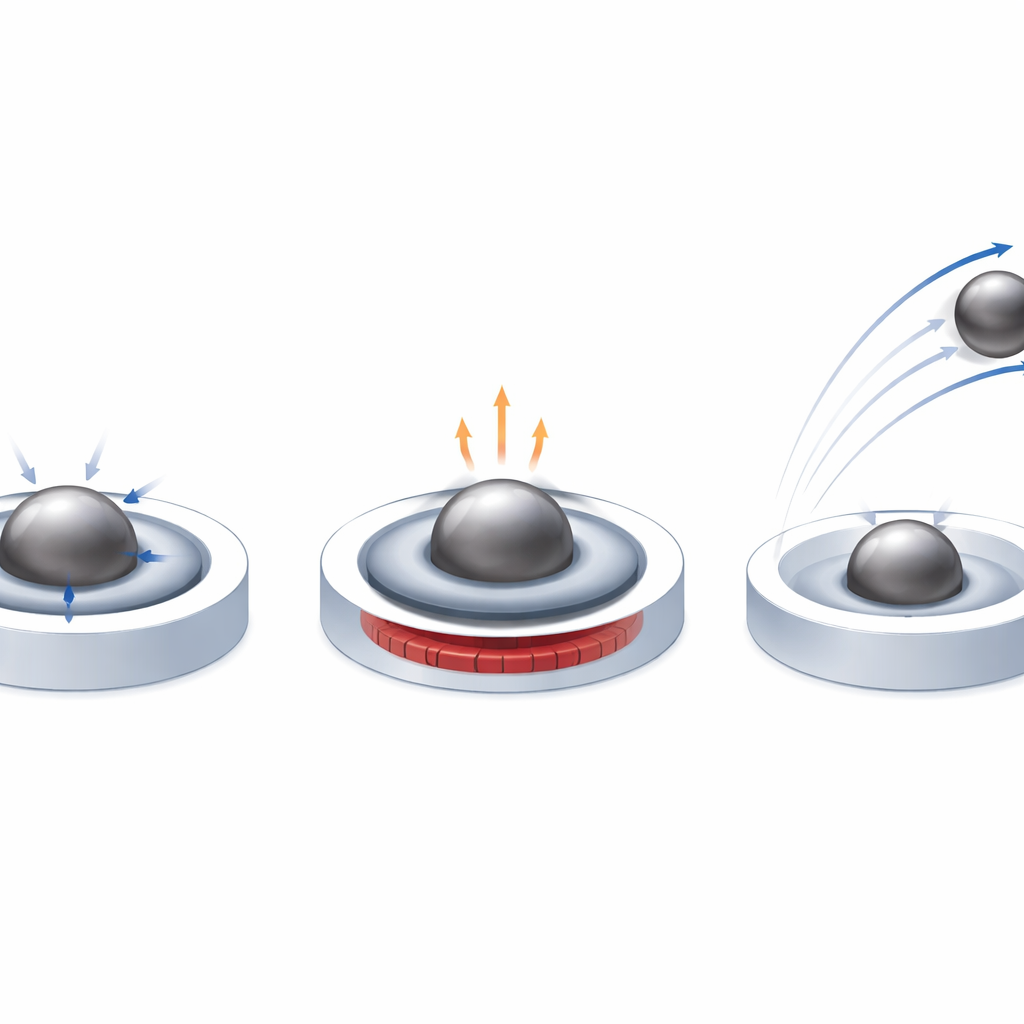
Per trasformare questa goccia fluente in una mano salda, il dispositivo usa il magnetismo. Poiché il metallo contiene particelle di ferro, l’accensione di una bobina elettromagnetica sotto la cavità rende il fluido più simile a un solido morbido. Il metallo avvolto si incastra quindi con la superficie dell’oggetto, conferendogli una forza sorprendente. La pinza può sostenere oggetti fino a circa 200 grammi—come peperoni, arance o broccoli—pur funzionando su scale millimetriche. Le versioni più piccole sono particolarmente efficienti, supportando carichi più di mille volte la massa del metallo liquido che contengono. Allo stesso tempo, la pressione di contatto può essere mantenuta bassa come circa 10 pascal, ben al di sotto di quanto danneggerebbe tofu, alghe gelatinee o molti piccoli animali, rendendola eccezionalmente delicata.
Rilasciare alla velocità della luce
Rilasciare oggetti minuscoli è spesso più difficile che afferrarli, perché forze invisibili come adesione e tensione superficiale li fanno aderire. Qui, lo stesso metallo liquido offre una soluzione integrata. Commutando il segnale elettrico, la tensione superficiale del metallo ritorna a un valore molto alto. La goccia si ritrae, proprio come una banda di gomma tesa che all’improvviso viene lasciata andare, scagliando lontano ciò che teneva. Gli esperimenti mostrano che un capello umano o particelle microscopiche possono essere scagliati in pochi millesimi di secondo, raggiungendo accelerazioni fino a circa 42 volte la gravità terrestre—più veloci di qualsiasi altra pinza riportata. Importante, i ricercatori possono modulare questa velocità di rilascio regolando la tensione, scambiando potenza per sicurezza quando si maneggiano campioni particolarmente fragili.
Maneggiare la vita senza danneggiare
Per verificare se azioni così drammatiche siano sicure per tessuti viventi, il gruppo ha usato la pinza per spostare embrioni di zebrafish in stadio precoce—piccole sfere sensibili spesso impiegate nei laboratori di biologia. Rispetto a una pipetta standard, lo strumento in metallo liquido ha funzionato molto più velocemente e con un tasso di successo più alto, eppure gli embrioni non hanno mostrato segni aggiuntivi di stress, deformità o movimenti compromessi durante lo sviluppo. La pinza ha anche catturato scarafaggi veloci, lombrichi guizzanti e piccoli pesci scivolosi senza apparenti danni, suggerendo possibili usi futuri in ecologia, acquacoltura e ricerca biomedica dove una manipolazione precisa ma delicata è essenziale.
Un nuovo tipo di tocco robotico universale
Lo studio dimostra che controllando come una goccia di metallo liquido scorre, si irrigidisce e si ritrae, un singolo dispositivo può afferrare e rilasciare attivamente oggetti che coprono circa 14 ordini di grandezza in peso, da sfere microscopiche a prodotti di uso quotidiano, e farlo in aria, acqua di mare, soluzioni alcaline o acide. Per i non specialisti, il messaggio chiave è che i robot non hanno più bisogno di mani diverse per ogni compito: una singola pinza in metallo liquido, simile a un’ameba, potrebbe un giorno permettere alle macchine di interagire in sicurezza con tutto, dalle cellule viventi all’elettronica fragile, portando un tocco più adattabile, delicato e preciso nell’industria e nella medicina.
Citazione: Chen, X., Zhang, M., Cao, L. et al. Liquid metal universal grippers for gentle, adaptable, multiscale manipulation. Nat Commun 17, 3548 (2026). https://doi.org/10.1038/s41467-026-70313-6
Parole chiave: robotica morbida, metallo liquido, pinza universale, manipolazione su microscale, manipolazione biomedica