Clear Sky Science · ru
Универсальные захваты из жидкого металла для деликатной, адаптивной и многомасштабной манипуляции
Мягкий робот, текущий как живая клетка
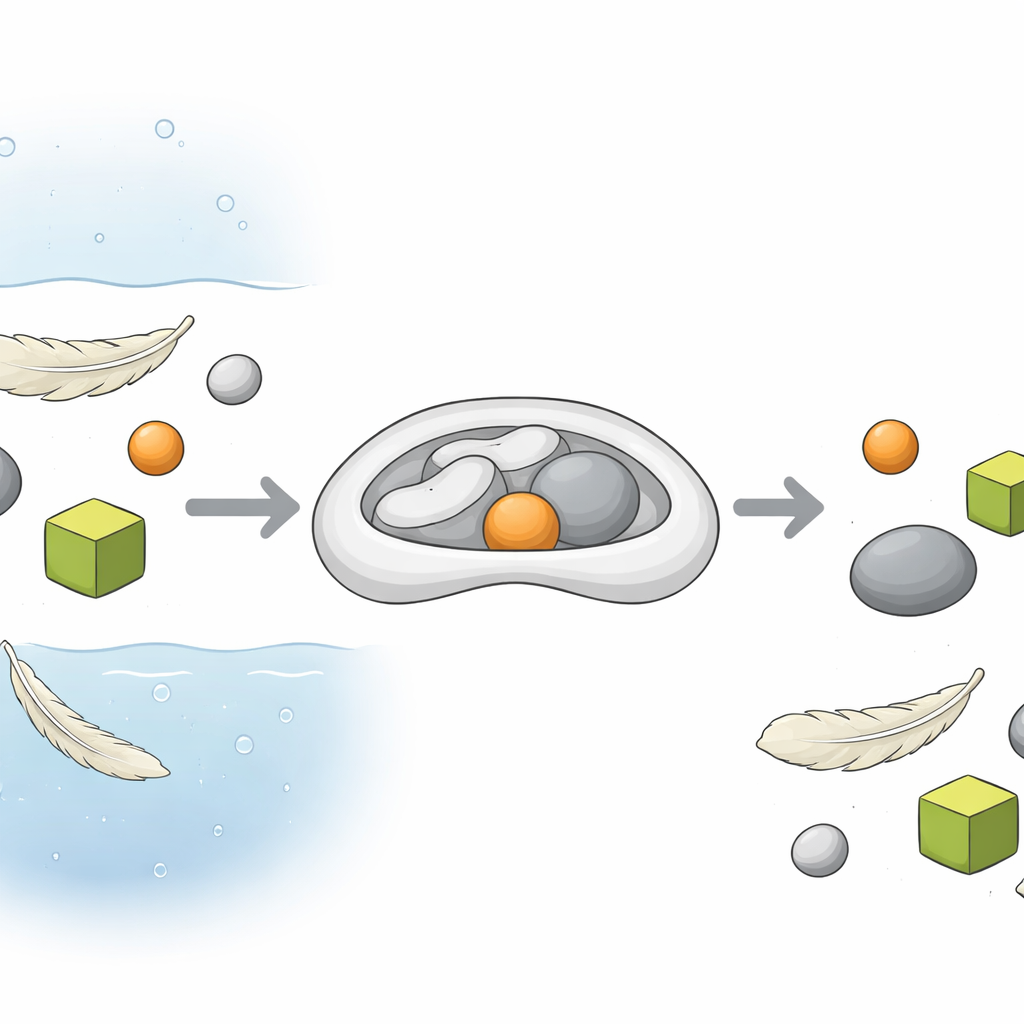
Представьте роботизированную руку, которая может аккуратно подобрать семя одуванчика, живую рыбку, пылинку и тяжёлый плод — всё одним и тем же крошечным устройством — и сделать это под водой, в кислоте или на открытом воздухе. В этом исследовании как раз представлена такая «универсальная клеща»: из жидкого металла, который течёт и переформовывается подобно амёбе, позволяя машинам обращаться с объектами, слишком хрупкими, слишком маленькими или слишком причудливой формы для современных роботов.
Почему деликатное захватывание так сложно
Обычные роботизированные «руки» отлично справляются с прочными, регулярными предметами — коробками или инструментами, — но испытывают трудности с хрупкими, мягкими или микроскопическими объектами. Многофалангованные механизмы могут раздавить такие предметы или не заметить крошечные; захваты, которые обволакивают предметы в мягких мешках или используют частицы, сцепляющиеся между собой, адаптируются под форму, но часто требуют громоздких насосов или нагревателей и всё равно не могут надёжно удерживать быстро движущиеся существа или очень мелкие детали. Адгезивные инструменты подхватывают микрочипы или волокна, но испытывают сложности с контролируемым отпусканием. На производствах, в лабораториях и в биологических исследованиях остаётся большой пробел: как захватить, а затем чисто отпустить всё — от живых организмов до микроприборов — по огромному диапазону размеров и в самых разных средах.
Заимствование приёма у амёб
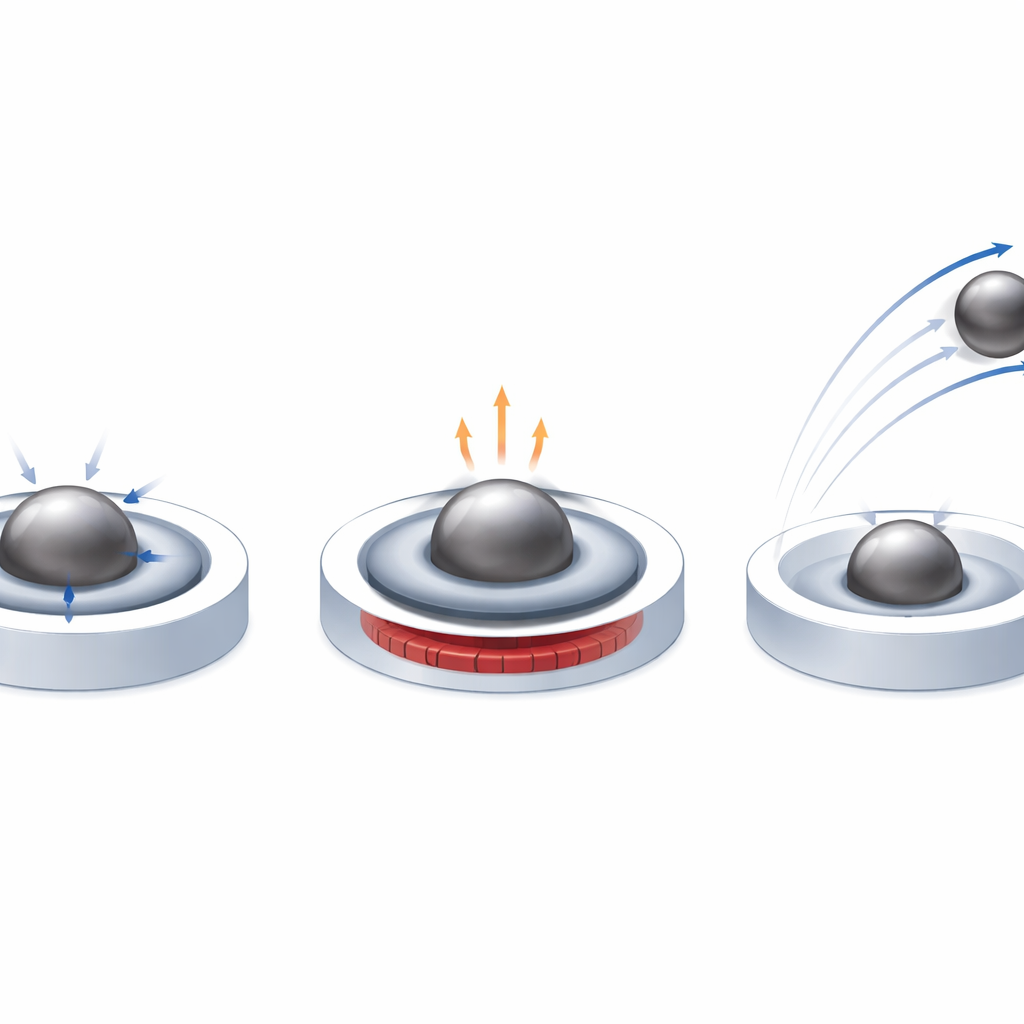
Амёбы, одноклеточные организмы, решают эту задачу телом, которое ведёт себя как очень мягкая жидкость. Они обтекают добычу, окружают её и затем сжимают. Исследователи имитируют эту стратегию, используя капли жидкого металла на основе галлия, смешанные с крошечными частицами железа. При комнатной температуре эти металлы остаются в жидком состоянии, но их поверхностное натяжение сильно меняется при подаче небольшого напряжения. В новом универсальном захвате жидкого металла капля находится внутри мягкой 3D-печатной полости в контакте со слоем солёной жидкости. При подаче электрического сигнала поверхностное натяжение металла почти исчезает, и он растекается, обвивая любой объект поблизости — стеклянную бусину, извитую раковину или живого червяка — как в жидкости, так и в воздухе.
От мягкого течения к прочному удержанию
Чтобы превратить эту текучую каплю в твёрдый захват, устройство использует магнетизм. Поскольку металл содержит частицы железа, включение электромагнитной катушки под полостью делает жидкость похожей на мягкий твёрдый материал. Обёрнутый металл затем сцепляется с поверхностью объекта, обеспечивая впечатляющую прочность. Захват может удерживать предметы массой до примерно 200 граммов — например перцы, апельсины или брокколи — при этом работая на миллиметровых масштабах. Меньшие версии особенно эффективны, поддерживая полезную нагрузку более чем в тысячу раз превышающую массу содержащегося в них жидкого металла. Одновременно контактное давление можно удерживать на уровне примерно 10 паскалей, что намного ниже порога, повреждающего тофу, желеподобные водоросли или многих мелких животных, делая захват исключительно нежным.
Отпускание с молниеносной скоростью
Отпустить крошечные объекты часто сложнее, чем захватить их, потому что невидимые силы — адгезия и поверхностное натяжение — заставляют их прилипать. Здесь тот же жидкий металл предлагает встроенное решение. При переключении электрического сигнала поверхностное натяжение металла резко восстанавливается до очень высокого значения. Капля втягивается, подобно растянутой резинке, которая внезапно освобождается, отбрасывая то, что она держала. Эксперименты показывают, что человеческий волос или микрочастицы могут быть выброшены всего за несколько тысячных долей секунды, достигая ускорений до примерно 42 g — быстрее, чем любой ранее описанный захват. Важно, что исследователи могут регулировать скорость отпуска, меняя напряжение, жертвуя мощностью ради безопасности при работе с особо хрупкими образцами.
Обращение с живым без вреда
Чтобы проверить, безопасны ли такие резкие действия для живых тканей, команда использовала захват для перемещения ранних эмбрионов цефалоновых рыбок (зебрафиш) — крошечных чувствительных сфер, часто используемых в биолабораториях. По сравнению со стандартной пипеткой инструмент на основе жидкого металла работал значительно быстрее и с более высокой долей успешных переносов, при этом эмбрионы не показывали дополнительных признаков стресса, деформаций или нарушений подвижности в процессе развития. Захват также ловил быстро бегущих тараканов, извивающихся дождевых червей и скользких мальков без видимого вреда, что указывает на будущие применения в экологии, аквакультуре и биомедицинских исследованиях, где требуются точное и вместе с тем бережное обращение.
Новый тип универсального роботизированного прикосновения
Исследование показывает, что, управляя тем, как капля жидкого металла течёт, уплотняется и резко сокращается, одно устройство может захватывать и активно отпускать объекты в пределах примерно 14 порядков величины по массе — от микроскопических бусин до обычных плодов — и делать это в воздухе, морской воде, щелочных или кислотных растворах. Для неспециалистов ключевая мысль такова: роботам больше не нужны разные «руки» для каждой задачи: одна амёбообразная капля жидкого металла в будущем позволит машинам безопасно взаимодействовать со всем — от живых клеток до хрупкой электроники, привнося более адаптивное, мягкое и точное прикосновение в промышленность и медицину.
Цитирование: Chen, X., Zhang, M., Cao, L. et al. Liquid metal universal grippers for gentle, adaptable, multiscale manipulation. Nat Commun 17, 3548 (2026). https://doi.org/10.1038/s41467-026-70313-6
Ключевые слова: мягкая робототехника, жидкий металл, универсальный захват, манипуляция в микромасштабе, биомедицинская обработка