Clear Sky Science · nl
Universele grijpers van vloeibaar metaal voor zachte, aanpasbare manipulatie over meerdere schalen
Een zachte robot die stroomt als een levende cel
Stel je een robothand voor die zachtjes een paardenbloemzaadje, een levende vis, een stofdeeltje en een zwaar stuk fruit kan oppakken — allemaal met hetzelfde kleine apparaat — en dat onder water, in zuur, of in de open lucht. Deze studie presenteert precies dat: een "universele grijper" van vloeibaar metaal die stroomt en zich opnieuw vormt zoals een amoebe, waardoor machines objecten kunnen hanteren die te fragiel, te klein of te raar gevormd zijn voor de robots van vandaag.
Waarom zacht grijpen zo moeilijk is
Conventionele robotarmen zijn uitstekend in het vastpakken van stevige, regelmatige voorwerpen zoals dozen of gereedschap, maar ze hebben moeite met delicate, zachte of microscopische doelen. Veelvingerige handen kunnen fragiele objecten verpletteren of kleine objecten missen. Grijpers die voorwerpen omsluiten in zachte zakken of korrels gebruiken die vastlopen kunnen zich aan vormen aanpassen, maar hebben vaak omvangrijke pompen of verwarmers nodig en kunnen nog steeds geen snel bewegende dieren of zeer kleine onderdelen betrouwbaar vasthouden. Hechtmiddelen kunnen microscopische chips of vezels oppakken, maar hebben moeite om op commando los te laten. In fabrieken, laboratoria en biologisch onderzoek laat dit een groot gat: hoe pak je alles vast en laat je het vervolgens netjes los — van levende organismen tot microapparaten — over een enorm bereik van groottes en in zeer verschillende omgevingen.
Een truc lenen van amoeben
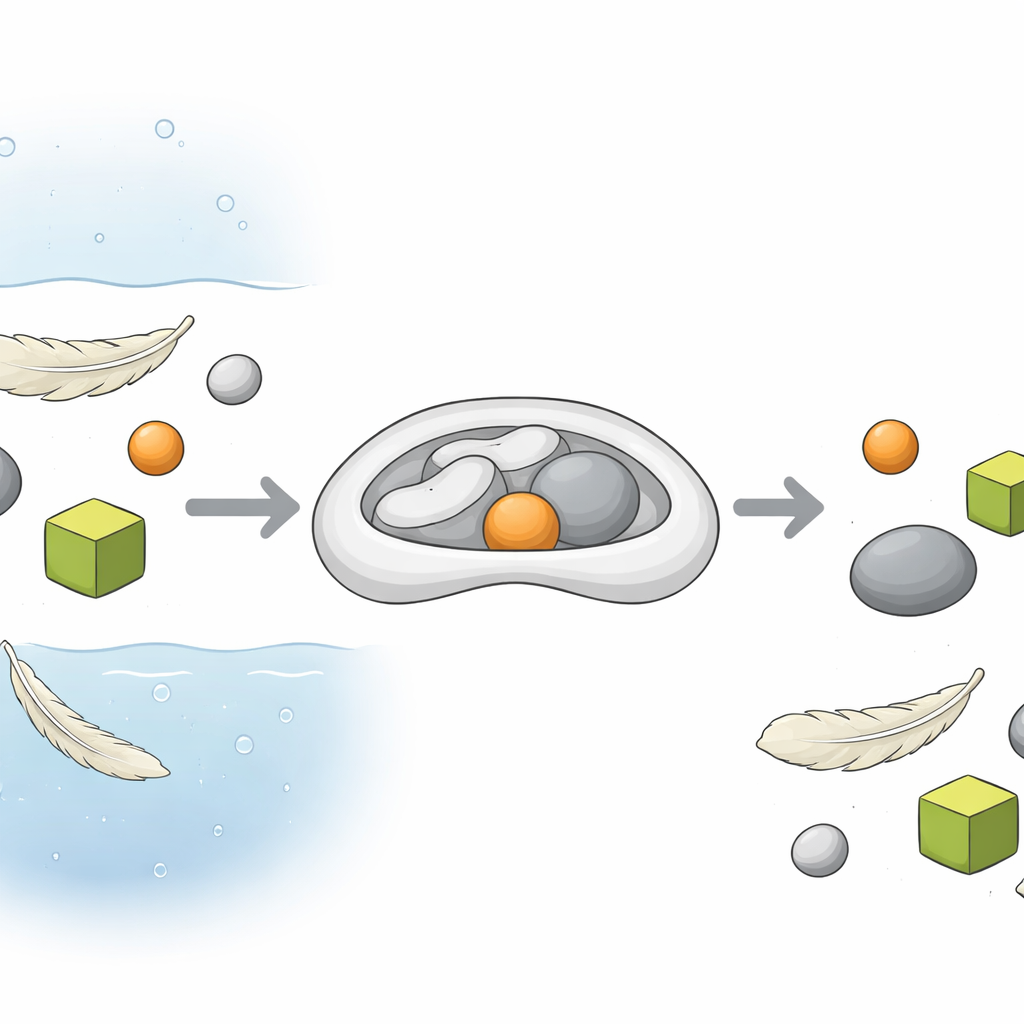
Amoeben, eencellige organismen, lossen dit probleem op met een lichaam dat zich gedraagt als een zeer zachte vloeistof. Ze vloeien om prooien heen, omsluiten ze en knijpen ze later uit. De onderzoekers imiteren deze strategie met druppels gallium-gebaseerd vloeibaar metaal gemengd met kleine ijzerdeeltjes. Bij kamertemperatuur blijven deze metalen vloeibaar, maar ze kunnen dramatisch veranderen hoe sterk hun oppervlak naar elkaar toe trekt wanneer een kleine spanning wordt aangelegd. In de nieuwe vloeibare-metaal-universele-grijper zit een druppel in een zachte 3D-geprinte holte, in contact met een dun laagje zoutoplossing. Wanneer het team een elektrisch signaal toepast, vervalt de oppervlaktetrekking van het metaal bijna en spreidt het zich uit, waarbij het zich om elk nabijgelegen object wikkelt — of het nu een glasparel, een gedraaide schelp of een levende worm is — zowel in vloeistoffen als in lucht.
Van zachte stroom naar sterke greep
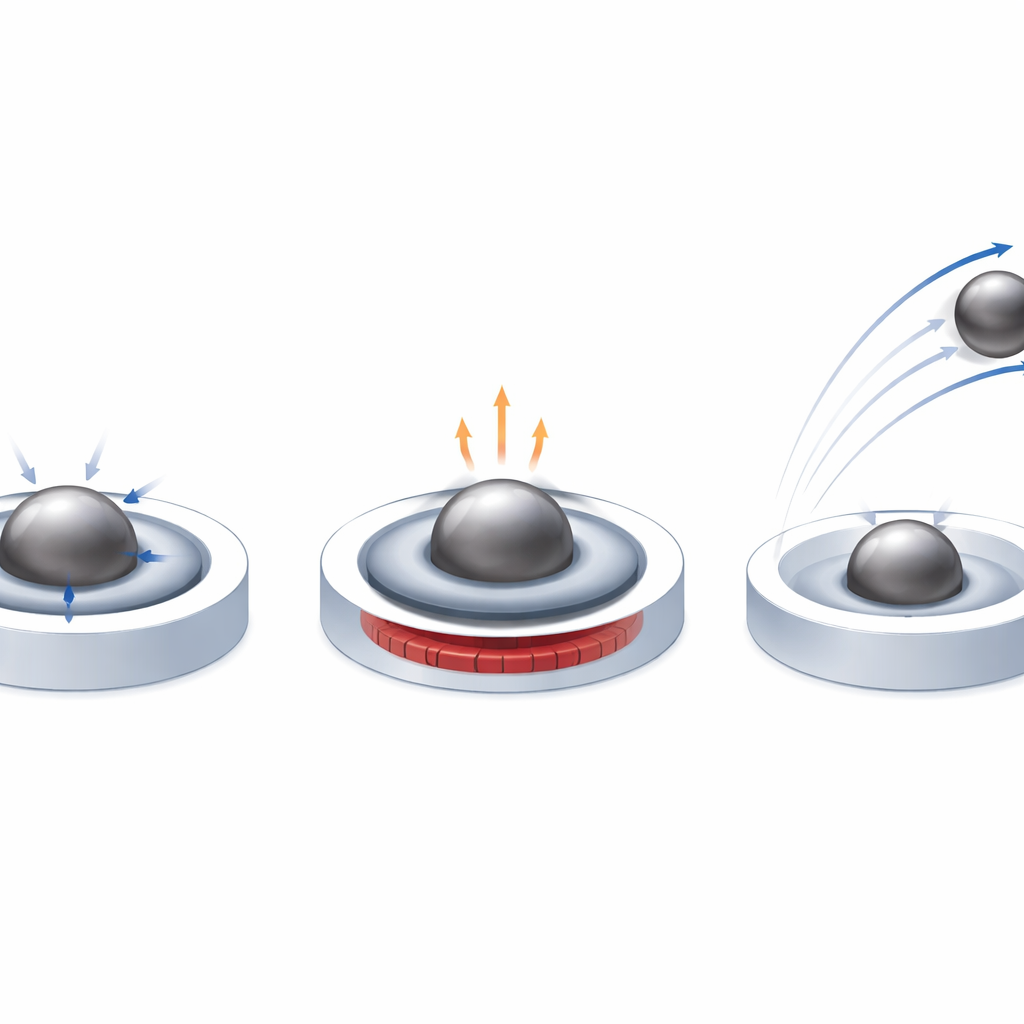
Om deze vloeiende druppel in een stevige hand te veranderen, gebruikt het apparaat magnetisme. Omdat het metaal ijzerdeeltjes bevat, zorgt het inschakelen van een elektromagneetspoel onder de holte ervoor dat de vloeistof zich meer als een zacht vaste stof gedraagt. Het gewikkelde metaal vergrendelt zich vervolgens in het oppervlak van het object, wat een verrassende sterkte geeft. De grijper kan voorwerpen vasthouden tot ongeveer 200 gram — zoals pepers, sinaasappels of broccoli — terwijl hij nog steeds op millimeterschaal werkt. Kleinere versies zijn bijzonder efficiënt en dragen ladingen van meer dan duizend keer de massa van het vloeibare metaal dat ze bevatten. Tegelijkertijd kan de contactdruk zo laag gehouden worden als ongeveer 10 pascal, ver onder wat tofu, gelei-achtige algen of veel kleine dieren zou beschadigen, waardoor hij uitzonderlijk zacht is.
Loslaten met bliksemsnelheid
Het loslaten van kleine objecten is vaak moeilijker dan ze grijpen, omdat onzichtbare krachten zoals adhesie en oppervlaktetrekking ze laten kleven. Hier biedt hetzelfde vloeibare metaal een ingebouwde oplossing. Door het elektrische signaal te schakelen, schiet de oppervlaktetrekking van het metaal terug naar een zeer hoge waarde. De druppel trekt zich terug, vergelijkbaar met een uitgerekte elastiek die plotseling loslaat, en katapulteert weg wat hij vasthield. Experimenten tonen aan dat een mensenhaar of microscopische deeltjes in slechts enkele duizendsten van een seconde kunnen worden weggelanceerd, met versnellingen tot ongeveer 42 keer de zwaartekracht van de aarde — sneller dan welke andere gerapporteerde grijper ook. Belangrijk is dat de onderzoekers deze loslaatsnelheid kunnen afregelen door de spanning aan te passen, waarbij ze kracht ruilen voor veiligheid bij de behandeling van bijzonder fragiele monsters.
Levend weefsel hanteren zonder schade
Om te testen of zulke dramatische handelingen veilig zijn voor levende weefsels, gebruikte het team de grijper om vroege zebravis-embryo’s te verplaatsen — kleine, gevoelige bolletjes die vaak in biologieën laboratoria worden gebruikt. In vergelijking met een standaard pipet werkte het vloeibare-metaal-gereedschap veel sneller en met een hogere succesratio, maar de embryo’s vertoonden geen extra tekenen van stress, misvormingen of verminderde beweging tijdens hun ontwikkeling. De grijper ving ook snel bewegende kakkerlakken, kronkelende regenwormen en glibberige jonge vissen zonder waarneembare schade, wat wijst op toekomstige toepassingen in ecologie, aquacultuur en biomedisch onderzoek waar nauwkeurige maar zachte hantering essentieel is.
Een nieuw soort universele robotische aanraking
De studie laat zien dat door te beheersen hoe een druppel vloeibaar metaal stroomt, verhardt en weer terugschiet, één apparaat objecten kan grijpen en actief loslaten over ongeveer 14 ordes van grootte in gewicht, van microscopische parels tot alledaagse producten, en dat in lucht, zeewater, alkalische of zure oplossingen. Voor niet‑specialisten is de kernboodschap dat robots niet langer voor elke taak verschillende handen nodig hebben: een enkele, amoebe‑achtige vloeibare‑metaal‑grijper zou machines in de toekomst veilig kunnen laten omgaan met alles van levende cellen tot fragiele elektronica, en zo een meer aanpasbare, zachte en precieze aanraking naar zowel industrie als geneeskunde brengen.
Bronvermelding: Chen, X., Zhang, M., Cao, L. et al. Liquid metal universal grippers for gentle, adaptable, multiscale manipulation. Nat Commun 17, 3548 (2026). https://doi.org/10.1038/s41467-026-70313-6
Trefwoorden: soft robotics, vloeibaar metaal, universele grijper, manipulatie op microschaal, biomedische handling