Clear Sky Science · fr
Préhenseurs universels en métal liquide pour une manipulation douce, adaptable et multi-échelle
Un robot mou qui s�e9coule comme une cellule vivante
Imaginez une main robotique capable de cueillir avec douceur un ak�e9nion de pissenlit, un poisson vivant, un grain de poussi�e8re et un fruit lourd, le tout avec le m�eame petit dispositif — et de le faire sous l�e2u, dans de l�e2acide ou en plein air. Cette étude pr�e9sente exactement cela : un « pr�e9enseur universel » en m�e9tal liquide qui s�e9coule et se reconfigure comme une am�e9be, permettant aux machines de manipuler des objets trop fragiles, trop petits ou trop irr�e9guliers pour les robots actuels.
Pourquoi saisir en douceur est si difficile
Les mains robotiques classiques excellent pour saisir des objets robustes et r�e9guliers, comme des bo�eetes ou des outils, mais elles peinent avec des cibles d�e9licates, molles ou microscopiques. Les mains �e0 plusieurs doigts peuvent �e9craser des objets fragiles ou rater les tr�e8s petits. Les pr�e9enseurs qui enferment des objets dans des poches souples ou utilisent des grains qui se bloquent s�e9parent peuvent s�e9adapter aux formes, mais ils exigent souvent des pompes ou des chauffages volumineux et ne peuvent pas toujours retenir des cr�e9atures vives ou des pi�e8ces minuscules en mouvement. Les outils adh�e9sifs peuvent attraper des puces ou des fibres microscopiques, mais ils peinent �e0 les rel�e2cher sur commande. Dans les usines, les laboratoires et la recherche biologique, subsiste un vide important : comment saisir puis rel�e2cher proprement tout, des organismes vivants aux microdispositifs, sur une gamme de tailles énorme et dans des environnements tr�e8s vari�e9s.
Emprunter un stratag�e8me aux am�e9bes
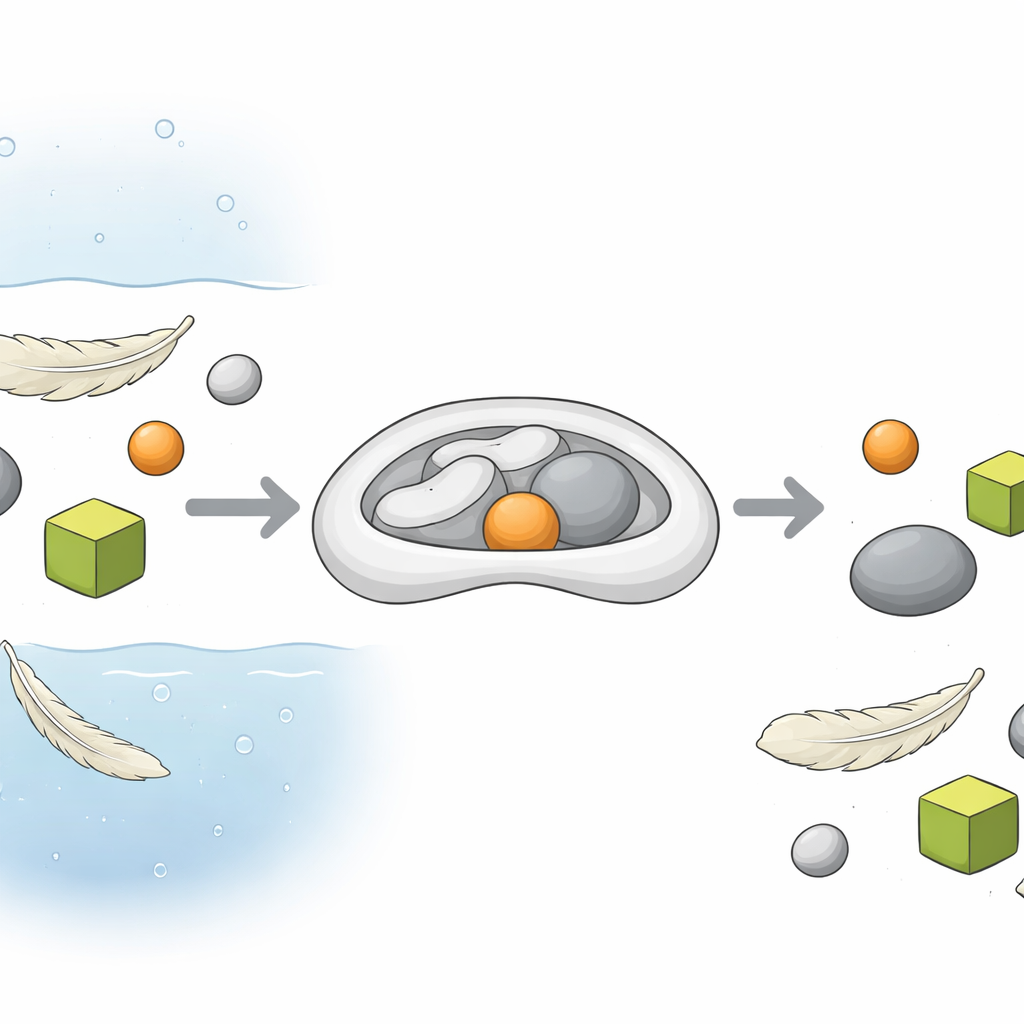
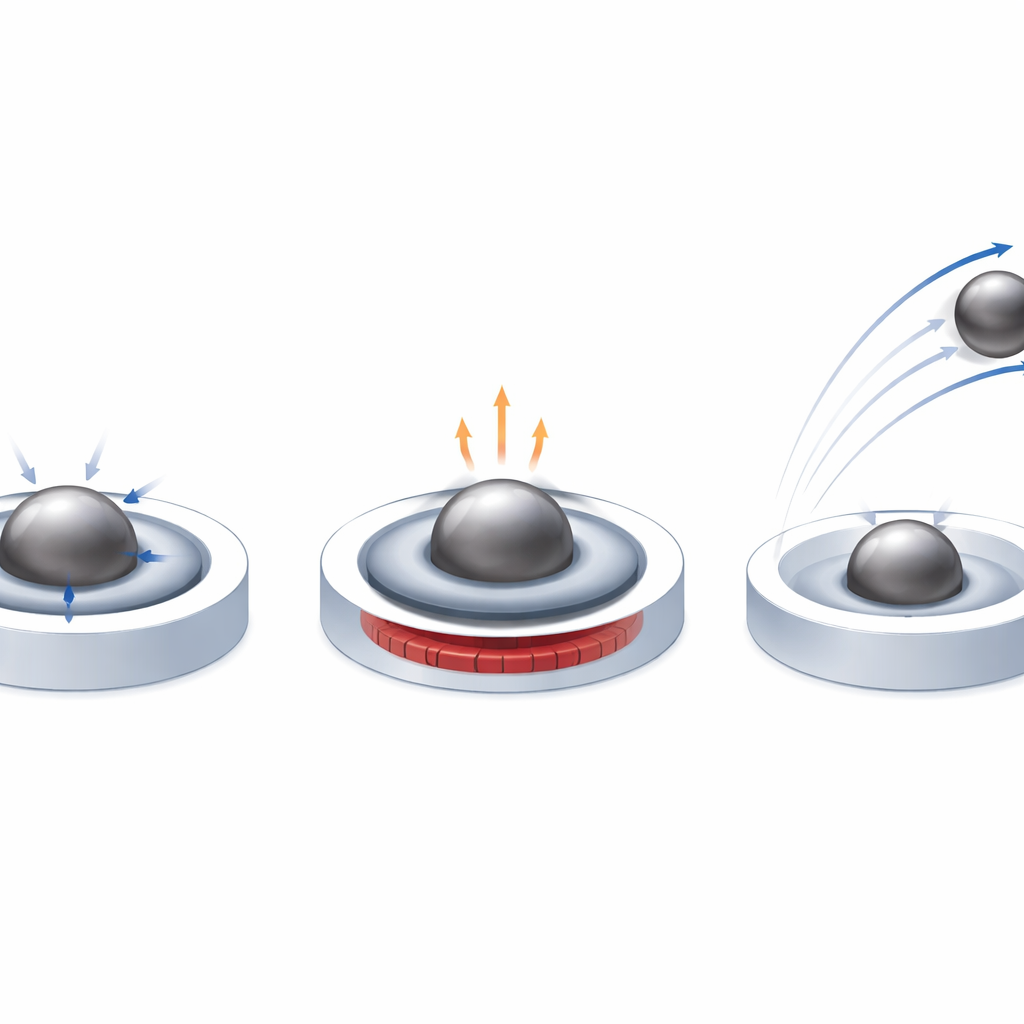
Les am�e9bes, organismes unicellulaires, r�e9solvent ce probl�e8me avec un corps qui se comporte comme un fluide tr�e8s mou. Elles s�e9coulent autour de leur proie, l�e2enveloppent, puis la pressent. Les chercheurs imitent cette strat�e9gie avec des gouttes de m�e9tal liquide �e0 base de gallium m�e9lang�e9es �e0 de minuscules particules de fer. �c0 temp�e9rature ambiante, ces m�e9taux restent liquides, mais leur tension de surface peut changer de mani�e8re spectaculaire lorsqu�e2on applique une petite tension �e9lectrique. Dans le nouveau pr�e9enseur universel en m�e9tal liquide, une goutte repose dans une cavit�e9 souple imprim�e9e en 3D, en contact avec une fine couche de liquide sal�e9. Lorsqu�e2on envoie un signal �e9lectrique, la tension de surface du m�e9tal devient quasiment nulle et il se d�e9ploie, s�e9enroulant autour de l�e2objet proche — qu�e2il s�e2agisse d�e2une billes de verre, d�e2une coquille tordue ou d�e2un ver vivant — aussi bien dans les liquides que dans l�e2air.
Du flux mou �e0 l�e2une prise forte
Pour transformer cette goutte fluide en une main ferme, l�e2appareil utilise le magn�e9tisme. Comme le m�e9tal contient des particules de fer, l�e2activation d�e2une bobine �e9lectromagn�e9tique sous la cavit�e9 fait que le fluide se comporte davantage comme un solide mou. Le m�e9tal enroul�e9 s�e9embo�eete alors �e0 la surface de l�e2objet, lui conf�e8rant une force surprenante. Le pr�e9enseur peut tenir des objets pesant jusqu�e2�e0 environ 200 grammes — comme des poivrons, des oranges ou du brocoli — tout en fonctionnant �e0 l�e2�e9chelle du millim�e8tre. Les versions plus petites sont particuli�e8rement efficients, soutenant des charges plus de mille fois sup�e9rieures �e0 la masse du m�e9tal liquide qu�e2elles contiennent. Parall�e8lement, la pression de contact peut �eatre maintenue aussi basse qu�e2environ 10 pascals, bien en dessous de ce qui endommagerait du tofu, des algues g�e9lifiantes ou de nombreux petits animaux, ce qui le rend exceptionnellement doux.
Rel�e2cher �e0 la vitesse de l�e2�e9clair
Rel�e2cher des objets minuscules est souvent plus difficile que de les saisir, car des forces invisibles comme l�e2adh�e9rence et la tension de surface les font coller. Ici, le m�eame m�e9tal liquide offre une solution int�e9gr�e9e. En changeant le signal �e9lectrique, la tension de surface du m�e9tal revient �e0 une valeur tr�e8s �e9lev�e9e. La goutte se r�e9tracte, un peu comme un �e9lastique tendu qui se rompt soudainement, projetant au loin ce qu�e2elle tenait. Les exp�e9riences montrent qu�e2un cheveu humain ou des particules microscopiques peuvent �eatre lanc�e9s en quelques milli�e8mes de seconde, atteignant des accél�e9rations allant jusqu�e2�e0 environ 42 fois la gravitation terrestre — plus rapide que tout autre pr�e9enseur rapport�e9. Fait important, les chercheurs peuvent r�e9gler cette vitesse de lib�e9ration en ajustant la tension, troquant puissance contre s�e9curit�e9 lorsqu�e2ils manipulent des �e9chantillons particuli�e8rement fragiles.
Manipuler du vivant sans lui nuire
Pour v�e9rifier si de telles actions spectaculaires sont sans danger pour les tissus vivants, l�e2�e9quipe a utilis�e9 le pr�e9enseur pour d�e9placer de jeunes embryons de z�e9br�e9s — de petites sph�e8res sensibles souvent utilis�e9es en laboratoires de biologie. Compar�e9 �e0 une pipette standard, l�e2outil en m�e9tal liquide a op�e9r�e9 beaucoup plus vite et avec un taux de r�e9ussite sup�e9rieur, sans que les embryons ne montrent de signes suppl�e9mentaires de stress, de d�e9formations ou d�e2alt�e9ration du mouvement pendant leur d�e9veloppement. Le pr�e9enseur a aussi attrap�e9 des cafards rapides, des lombrics qui se tortillent et des alevins glissants sans dommage apparent, laissant entrevoir des usages futurs en �e9cologie, aquaculture et recherche biom�e9dicale o�f9 une manutention pr�e9cise mais douce est essentielle.
Une nouvelle forme de toucher robotique universel
L�e2�e9tude montre qu�e2en contr�f4lant comment une goutte de m�e9tal liquide s�e9coule, se raidit et se r�e9tracte, un seul dispositif peut saisir et rel�e2cher activement des objets couvrant �e0 peu pr�e8s 14 ordres de grandeur en masse, des billes microscopiques aux produits du quotidien, et ce dans l�e2air, l�e2eau de mer, des solutions alcalines ou acides. Pour les non-sp�e9cialistes, le message cl�e9 est que les robots n�e2ont plus besoin d�e2une main diff�e9rente pour chaque t�e2che : un unique pr�e9enseur en m�e9tal liquide, semblable �e0 une am�e9be, pourrait un jour permettre aux machines d�e2interagir en toute s�e9curit�e9 avec tout, des cellules vivantes aux �e9lectroniques fragiles, apportant un toucher plus adaptable, doux et pr�e9cis �e0 l�e2industrie et �e0 la m�e9decine.
Citation: Chen, X., Zhang, M., Cao, L. et al. Liquid metal universal grippers for gentle, adaptable, multiscale manipulation. Nat Commun 17, 3548 (2026). https://doi.org/10.1038/s41467-026-70313-6
Mots-clés: robotique molle, métal liquide, préenseur universel, manipulation à l�e9chelle microscopique, manutention biom�e9dicale