Clear Sky Science · de
Flüssigmetall-Universalgreifer für sanfte, anpassungsfähige Manipulation über mehrere Skalen
Ein weicher Roboter, der wie eine lebende Zelle fließt
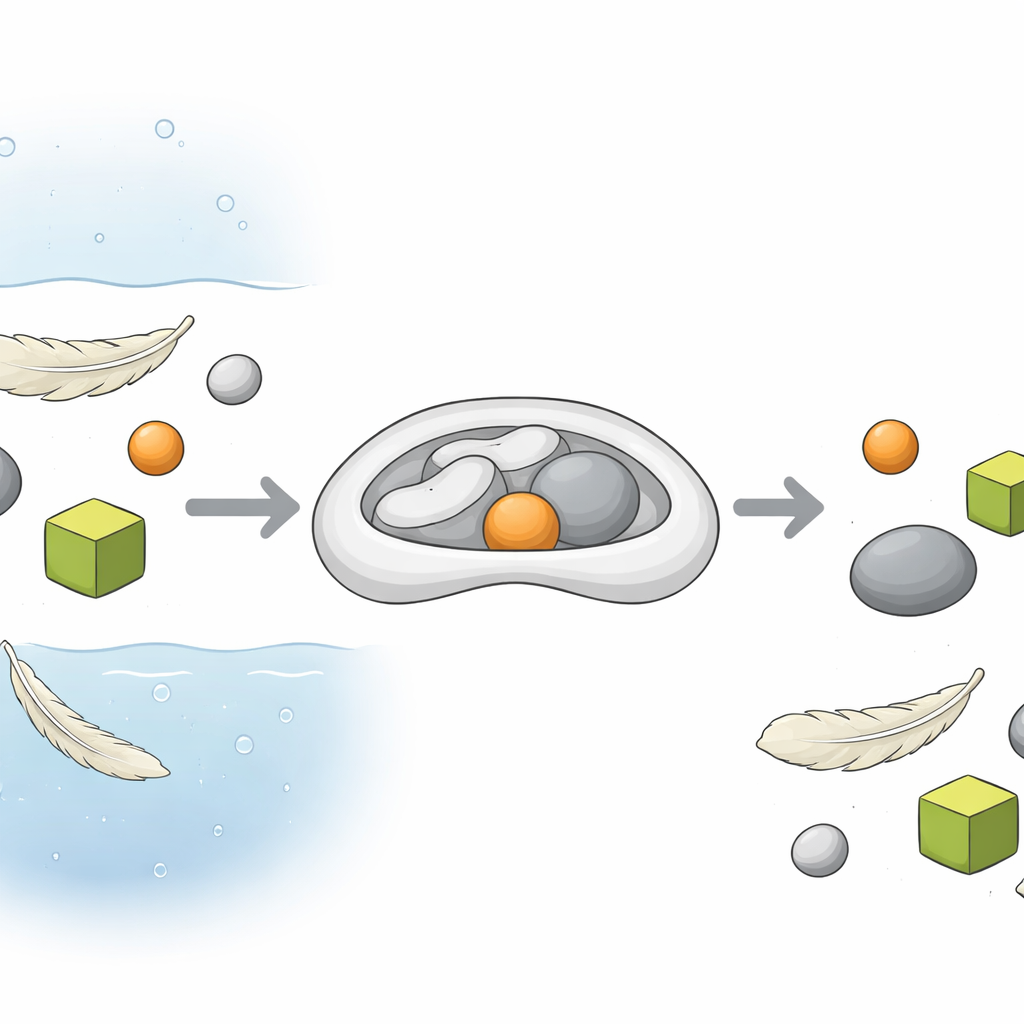
Stellen Sie sich eine Roboterhand vor, die mit demselben kleinen Gerät sanft einen Löwenzahnsamen, einen lebenden Fisch, ein Staubkorn und ein schweres Stück Obst greifen kann — und das unter Wasser, in säurehaltiger Umgebung oder an der Luft. Diese Studie stellt genau das vor: einen „Universalgreifer“ aus Flüssigmetall, das wie eine Amöbe fließt und sich umformt, sodass Maschinen Objekte handhaben können, die für heutige Roboter zu zerbrechlich, zu klein oder zu ungewöhnlich geformt sind.
Warum sanftes Greifen so schwer ist
Konventionelle Roboterhände sind hervorragend beim Greifen robuster, regelmäßiger Gegenstände wie Kartons oder Werkzeuge, haben aber Schwierigkeiten mit empfindlichen, weichen oder mikroskopischen Zielen. Mehrfingrige Hände können zerbrechliche Objekte zerdrücken oder winzige Teile verfehlen. Greifer, die Gegenstände in weichen Beuteln umschließen oder körnige Füllungen nutzen, die sich verkeilen, können sich zwar der Form anpassen, benötigen jedoch oft sperrige Pumpen oder Heizgeräte und können dennoch keine schnell bewegten Lebewesen oder sehr kleine Teile sicher halten. Auf Haftung basierende Werkzeuge können mikroskopische Chips oder Fasern aufnehmen, haben aber Probleme beim kontrollierten Loslassen. In Fabriken, Laboren und der biologischen Forschung entsteht so eine große Lücke: Wie ergreift man und lässt anschließend sauber alles los — von lebenden Organismen bis zu Mikroteilen — über einen enormen Größenspektrum und in sehr unterschiedlichen Umgebungen?
Ein Trick von Amöben übernehmen
Amöben, einzellige Organismen, lösen dieses Problem mit einem Körper, der sich wie eine sehr weiche Flüssigkeit verhält. Sie fließen um Beute herum, umschließen sie und pressen sie später wieder aus. Die Forscherinnen und Forscher ahmen diese Strategie mit Tropfen aus galliumbasiertem Flüssigmetall nach, das mit winzigen Eisenpartikeln gemischt ist. Bei Raumtemperatur bleibt dieses Metall flüssig, kann aber seine Oberflächenspannung drastisch verändern, wenn eine kleine Spannung angelegt wird. Im neuen Flüssigmetall-Universalgreifer sitzt ein Tropfen in einer weichen 3D-gedruckten Höhlung, in Kontakt mit einer dünnen Schicht salzhaltiger Flüssigkeit. Wenn das Team ein elektrisches Signal anlegt, verschwindet die Oberflächenspannung fast vollständig und das Metall breitet sich aus und umschließt das nahegelegene Objekt — sei es eine Glasperle, eine verdrehte Schale oder ein lebender Wurm — sowohl in Flüssigkeiten als auch an der Luft.
Vom weichen Fließen zum festen Halt
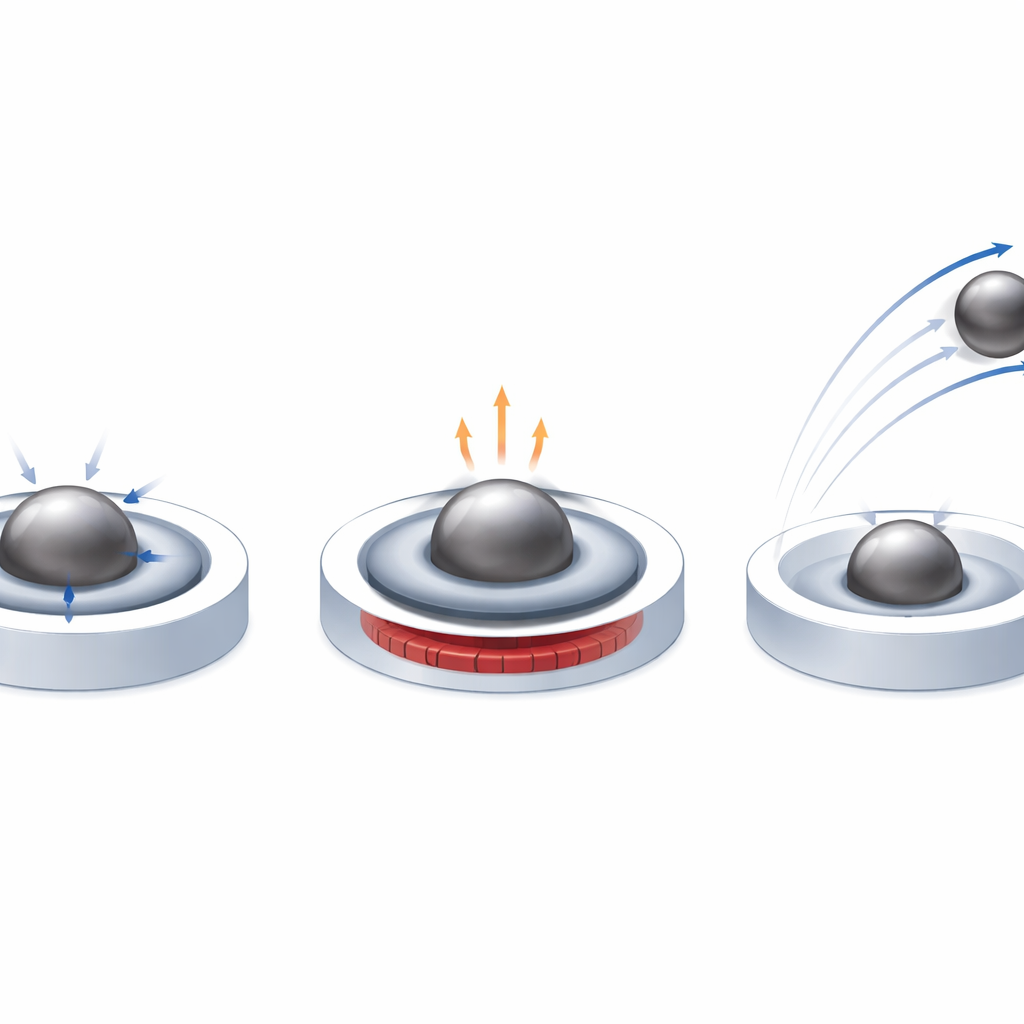
Um diesen fließenden Tropfen in eine feste Hand zu verwandeln, nutzt das Gerät Magnetismus. Da das Metall Eisenpartikel enthält, sorgt das Einschalten einer elektromagnetischen Spule unter der Höhlung dafür, dass die Flüssigkeit sich mehr wie ein weicher Feststoff verhält. Das umschlossene Metall verzahnt sich dann mit der Oberfläche des Objekts und verleiht überraschende Festigkeit. Der Greifer kann Objekte von bis zu etwa 200 Gramm halten — wie Paprika, Orangen oder Brokkoli — und funktioniert zugleich auf Millimeterskalen. Kleinere Varianten sind besonders effizient und tragen Lasten, die mehr als tausendmal so groß sind wie die Masse des enthaltenen Flüssigmetalls. Gleichzeitig kann der Kontaktdruck so gering wie etwa 10 Pascal gehalten werden, weit unterhalb dessen, was Tofu, geleeartige Algen oder viele kleine Tiere schädigen würde, was ihn außergewöhnlich sanft macht.
Loslassen in Lichtgeschwindigkeit
Das Freigeben winziger Objekte ist oft schwieriger als das Greifen, weil unsichtbare Kräfte wie Adhäsion und Oberflächenspannung sie festhalten. Hier bietet dasselbe Flüssigmetall eine eingebaute Lösung. Durch Umschalten des elektrischen Signals schnellt die Oberflächenspannung des Metalls auf einen sehr hohen Wert zurück. Der Tropfen zieht sich zusammen, ähnlich einem gedehnten Gummiband, das plötzlich loslässt, und schleudert dabei das gehaltene Objekt weg. Experimente zeigen, dass ein menschliches Haar oder mikroskopische Partikel in nur wenigen Tausendstelsekunden weggeschleudert werden können und Beschleunigungen von bis zu etwa 42-facher Erdbeschleunigung erreichen — schneller als bei jedem bisher berichteten Greifer. Wichtig ist, dass die Forschenden diese Ablösegeschwindigkeit durch Anpassung der Spannung einstellen können, so dass man bei besonders empfindlichen Proben Leistung gegen Sicherheit abwägen kann.
Lebewesen schonend handhaben
Um zu prüfen, ob solche drastischen Aktionen lebendes Gewebe schädigen, setzte das Team den Greifer ein, um frühe Zebrafisch-Embryonen zu bewegen — winzige, empfindliche Kugeln, die häufig in biologischen Laboren verwendet werden. Verglichen mit einer Standardpippette arbeitete das Flüssigmetallwerkzeug deutlich schneller und mit höherer Erfolgsrate, wobei die Embryonen keine zusätzlichen Anzeichen von Stress, Fehlbildungen oder beeinträchtigter Bewegung während ihrer Entwicklung zeigten. Der Greifer fing auch schnell bewegende Kakerlaken, zappelige Regenwürmer und glitschige Jungfische ohne erkennbare Schäden, was auf künftige Anwendungen in Ökologie, Aquakultur und biomedizinischer Forschung hinweist, wo präzise und zugleich schonende Handhabung wichtig ist.
Eine neue Art universeller robotischer Berührung
Die Studie zeigt, dass durch Kontrolle darüber, wie ein Flüssigmetalltropfen fließt, versteift und zurückschnappt, ein einziges Gerät Objekte über einen Bereich von grob 14 Größenordnungen in Gewicht greifen und aktiv loslassen kann — von mikroskopischen Perlen bis zu Alltagsprodukten — und dies an Luft, im Meerwasser, in alkalischen oder sauren Lösungen. Für Nichtfachleute lautet die Kernbotschaft: Roboter benötigen nicht länger für jede Aufgabe eine andere Hand: Ein einzelner, amöbenähnlicher Flüssigmetallgreifer könnte Maschinen eines Tages erlauben, sicher mit allem zu interagieren, von lebenden Zellen bis zu empfindlicher Elektronik, und so eine anpassungsfähigere, sanftere und präzisere Berührung in Industrie und Medizin bringen.
Zitation: Chen, X., Zhang, M., Cao, L. et al. Liquid metal universal grippers for gentle, adaptable, multiscale manipulation. Nat Commun 17, 3548 (2026). https://doi.org/10.1038/s41467-026-70313-6
Schlüsselwörter: weiche Robotik, Flüssigmetall, Universalgreifer, Mikroskalige Manipulation, biomedizinische Handhabung