Clear Sky Science · zh
由可调磁性镊驱动的铁磁流体微型机器人用于软组织力学测量
为什么软组织需要温和的工具
医生和研究人员越来越依赖组织的软硬性质来理解诸如癌症等疾病,但用来测量这些性质的工具常常过于刚硬或粗糙。本文介绍了一种微小的基于液体的微型机器人和一套智能磁体系统,两者结合提供了一种更温和、更精确的方法来探测软组织的力学特性,同时避免对组织造成损伤。
承担重任的微小液滴
这项工作的核心是一个铁磁流体液滴——一种对磁场响应的液体,由生物相容的植物油和磁铁矿纳米颗粒制成。由于它是液体,液滴会自然贴合周围组织,而不会像硬质探针那样戳刺组织。研究人员精心设计了铁磁流体的配方,使纳米颗粒能够均匀分散并在数周内保持稳定,并使用注射器系统可靠地形成约一毫米直径的液滴。测试表明,该液滴能在类似体内的水性环境中保持形状,并在磁场作用下平滑变形,这使其非常适合用作柔软的力学探针。
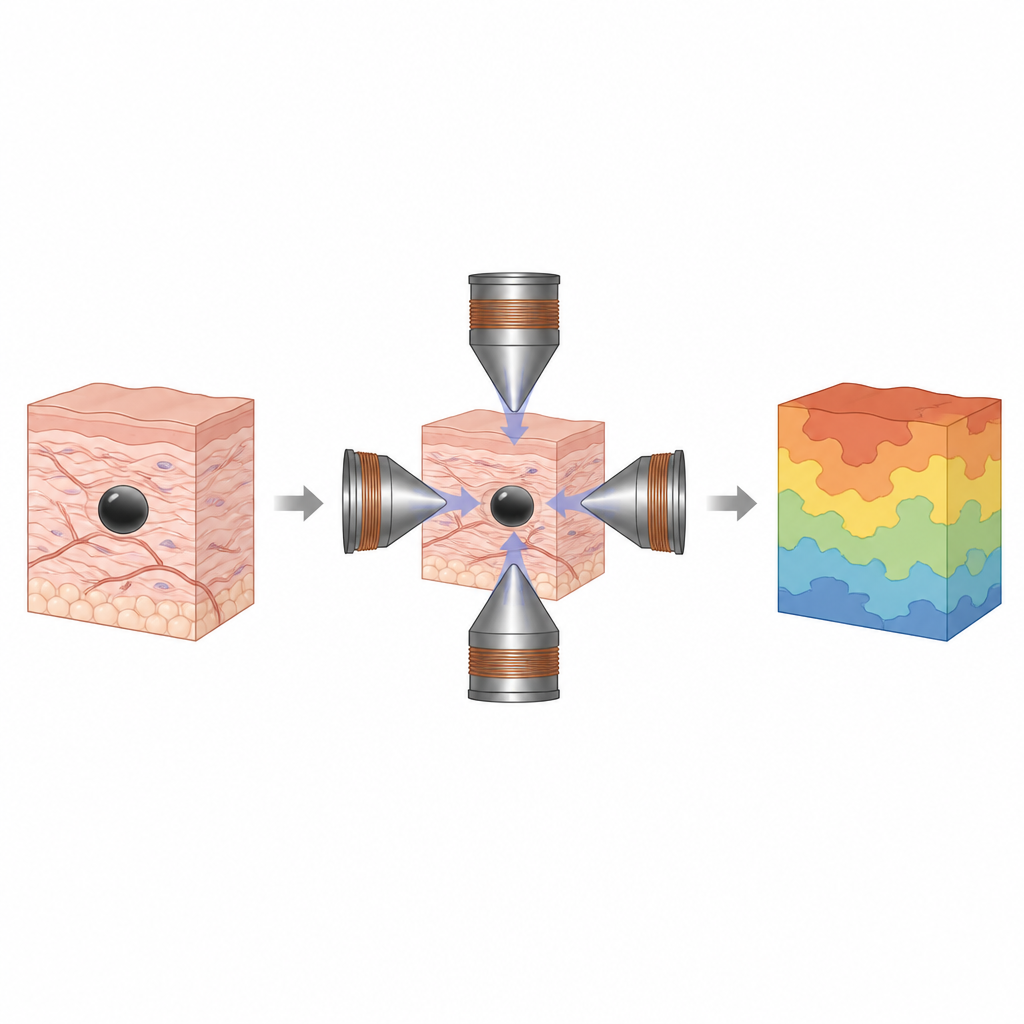
会变形的磁性操控场
为了在软材料内部控制这个液滴,团队构建了一个可重构的磁性镊系统,包含四个电磁极,其间距可在9到80毫米之间调节。在宽阔设置下,磁场具有强烈的梯度,能够像遥控珠子一样温和地牵引液滴,使其在较大区域内移动。在紧密设置下,相同的硬件产生强且近乎均匀的磁场,使液滴在原位被拉伸而几乎不移动。计算机模拟和实测结果证实,系统可以在这些模式之间切换,同时在液滴所在区域保持场的良好性质,并且基于相机的反馈回路将液滴的路径保持在其本身半径的一小部分范围内。
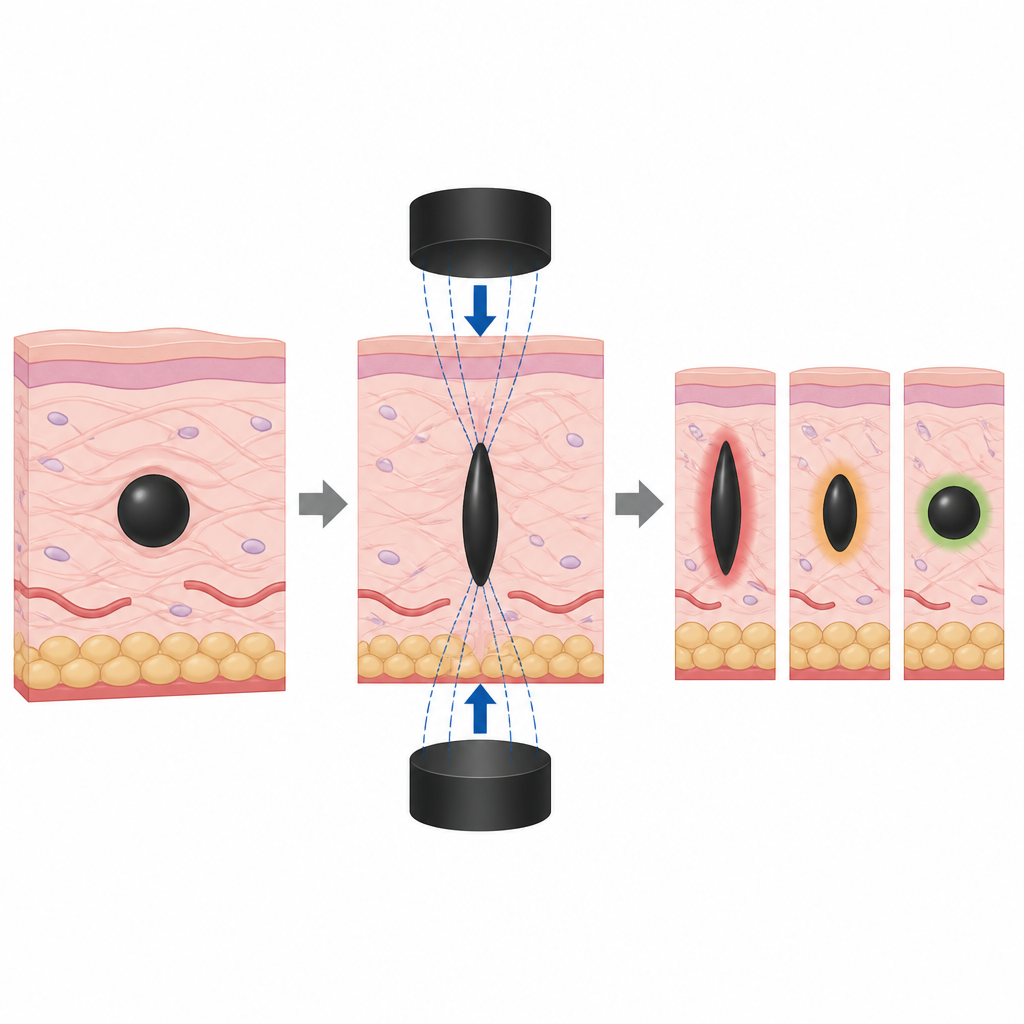
感知软物质内部的厚度与流动
当液滴到达感兴趣的位置时,均匀磁场使其变形,其形状随时间的变化揭示了周围材料的粘度和弹性。作者用一个包含弹性弹簧和粘性阻尼器的简单力学模型描述了这种行为,捕捉到了液滴缓慢拉伸随后趋于稳定的过程。他们首先将液滴置于覆盖广泛粘度范围的糖水溶液中,显示出所测粘度与标准粘度计高度一致,除在几乎纯水的情况下由于热扰动影响出现较大误差外,误差通常低于10%。随后,他们将液滴嵌入从非常柔软到相对坚硬的琼脂凝胶中,恢复出的刚度值在超过三个数量级的范围内与机械测试仪的结果相吻合。
在真实组织中的测试
为贴近真实条件,研究人员将铁磁流体液滴注入小块鸡胸肉组织中。从下方照明时,液滴轮廓可以被清晰捕捉,同时磁场对其进行拉伸。使用相同的分析方法,他们估算了组织的刚度并与传统压入法测量进行了比较,发现仅约1.6%的差异。这一成功表明,软性液滴和可调磁场能够在复杂、异质的组织内部协同工作而不造成明显损伤,同时仍能提供可靠的力学读数。
对未来医学的潜在意义
总体而言,这项研究表明,一种由可变形磁性镊驱动的温和铁磁流体微型机器人可以在软材料中导航并在局部高精度感测其粘性和弹性。对普通读者而言,这意味着我们离拥有一种可操纵的微型“触觉传感器”更近了,它可以从内部而不是仅从外部来绘制组织的软硬分布。进一步的发展,如更小的液滴、更丰富的磁控手段和更深层次的成像,可能将这一方法转变为一种用于研究疾病如何改变组织力学并以微创方式指导治疗的强大工具。
引用: Wang, Z., Wu, Z., Ploeg, HL. et al. Ferrofluid microrobot driven by an adjustable magnetic tweezer for soft tissue mechanical measurement. Microsyst Nanoeng 12, 180 (2026). https://doi.org/10.1038/s41378-026-01314-0
关键词: 铁磁流体微型机器人, 磁性镊子, 组织刚度, 粘弹性测量, 软体机器人