Clear Sky Science · en
Ferrofluid microrobot driven by an adjustable magnetic tweezer for soft tissue mechanical measurement
Why Soft Tissues Need Gentle Tools
Doctors and researchers increasingly rely on how soft or stiff our tissues are to understand diseases such as cancer, but the tools used to measure these properties are often too rigid and rough. This paper introduces a tiny, fluid-based microrobot and a smart magnet system that together offer a gentler, more precise way to feel out the mechanical properties of soft tissues without damaging them.
A Tiny Droplet with a Big Job
At the heart of this work is a droplet of ferrofluid, a liquid that responds to magnetic fields, made from biocompatible vegetable oil and magnetite nanoparticles. Because it is fluid, this droplet naturally conforms to surrounding tissue instead of poking it like a hard probe. The researchers carefully designed the ferrofluid ingredients so the nanoparticles remain evenly dispersed and stable for weeks, and they used a syringe system to reliably form droplets about one millimeter across. Tests showed that the droplet keeps its shape in watery environments similar to the body and deforms smoothly when exposed to a magnetic field, making it well suited as a soft mechanical probe.
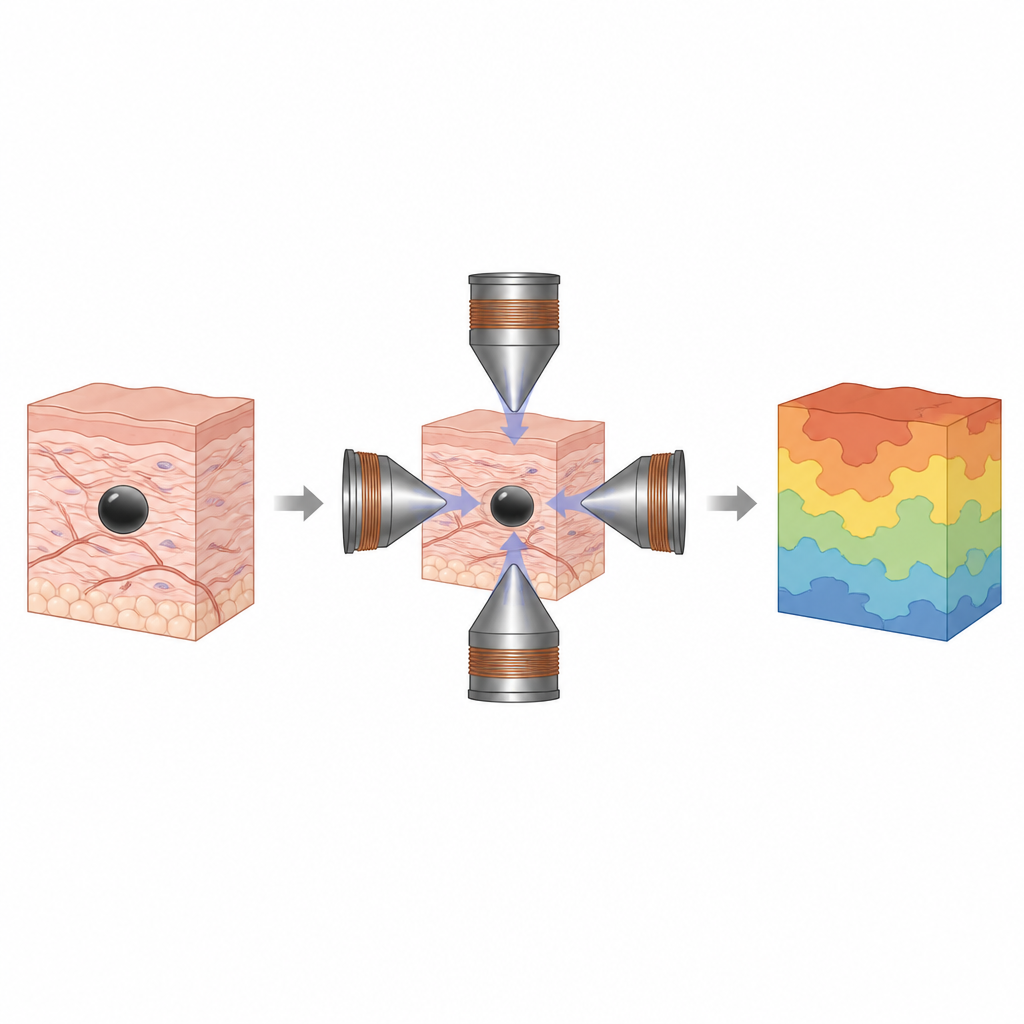
A Shape-Shifting Magnetic Playground
To control this droplet inside soft materials, the team built a reconfigurable magnetic tweezer system with four electromagnetic poles whose spacing can be adjusted from 9 to 80 millimeters. In the wide setting, the magnetic field has a strong gradient that gently pulls the droplet around like a remote-controlled bead, allowing it to navigate across a large area. In the tight setting, the same hardware produces a strong, nearly uniform field that stretches the droplet in place without moving it much. Computer simulations and measurements confirmed that the system can switch between these modes while keeping the field well behaved where the droplet sits, and a camera-based feedback loop held the droplet’s path within a fraction of its own radius.
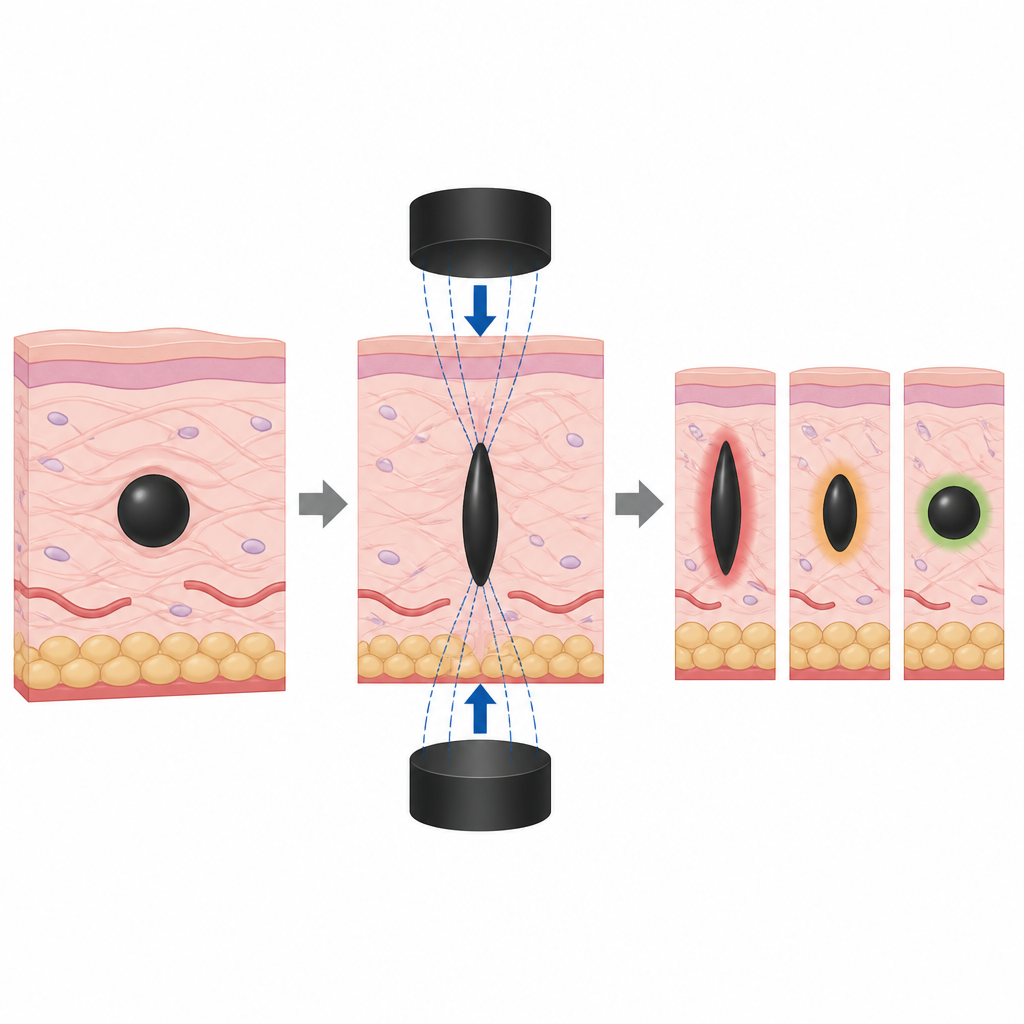
Feeling Thickness and Flow Inside Soft Matter
Once the droplet arrives at a point of interest, the uniform magnetic field deforms it, and the way its shape changes over time reveals how thick and how springy the surrounding material is. The authors modeled this behavior with a simple mechanical picture that includes both elastic springs and viscous dampers, capturing how the droplet slowly stretches and then settles. They first placed the droplet in sugar-water solutions covering a wide range of thicknesses and showed that the measured viscosities agreed closely with a standard viscometer, with errors typically below ten percent except in nearly pure water, where random motion becomes important. Next, they embedded the droplet in agar gels spanning from very soft to relatively firm and recovered stiffness values that matched those from a mechanical tester over more than three orders of magnitude.
Testing in Real Tissue
To move closer to real-world conditions, the researchers injected the ferrofluid droplet into small blocks of chicken breast tissue. Illuminated from below, the droplet’s outline could be captured clearly while the magnetic field stretched it. Using the same analysis, they estimated the tissue’s stiffness and compared it to conventional indentation measurements, finding a difference of only about 1.6 percent. This success suggests that the soft droplet and adjustable magnets can work together inside complex, heterogeneous tissue without causing notable damage, while still giving reliable mechanical readings.
What This Could Mean for Future Medicine
Overall, this study shows that a gentle ferrofluid microrobot, driven by a shape-shifting magnetic tweezer system, can navigate through soft materials and locally sense how viscous and elastic they are with high accuracy. For a layperson, that means we are closer to having a tiny, steerable "touch sensor" that can map how firm or soft tissues are from the inside, rather than only pressing from the outside. With further development, smaller droplets, richer magnetic control, and deeper imaging could turn this approach into a powerful tool for studying how diseases change tissue mechanics and for guiding treatments in a minimally invasive way.
Citation: Wang, Z., Wu, Z., Ploeg, HL. et al. Ferrofluid microrobot driven by an adjustable magnetic tweezer for soft tissue mechanical measurement. Microsyst Nanoeng 12, 180 (2026). https://doi.org/10.1038/s41378-026-01314-0
Keywords: ferrofluid microrobot, magnetic tweezers, tissue stiffness, viscoelastic measurement, soft robotics