Clear Sky Science · pl
Mikrorobot z ferrofluidu napędzany regulowanymi pęsetami magnetycznymi do pomiarów mechanicznych tkanek miękkich
Dlaczego tkanki miękkie potrzebują delikatnych narzędzi
Lekarze i badacze coraz częściej polegają na informacjach o tym, jak miękkie lub sztywne są nasze tkanki, by zrozumieć choroby takie jak rak, jednak narzędzia używane do pomiarów tych właściwości często są zbyt twarde i inwazyjne. W artykule przedstawiono maleńkiego, ciekłego mikrorobota oraz inteligentny system magnetyczny, które razem oferują delikatniejszy i precyzyjniejszy sposób sondowania mechanicznych właściwości tkanek miękkich bez ich uszkadzania.
Mała kropla z dużym zadaniem
W centrum tej pracy znajduje się kropla ferrofluidu — cieczy reagującej na pola magnetyczne — zrobiona z biokompatybilnego oleju roślinnego i nanocząsteczek magnetytu. Jako że jest płynna, kropla naturalnie dostosowuje się do otaczającej tkanki zamiast ją przebijać jak twarda sonda. Badacze starannie zaprojektowali skład ferrofluidu tak, by nanocząsteczki pozostawały równomiernie rozproszone i stabilne przez tygodnie, a do formowania kropli o średnicy około jednego milimetra użyli systemu z strzykawką. Testy wykazały, że kropla utrzymuje kształt w środowiskach wodnistych podobnych do warunków ustrojowych i gładko odkształca się pod wpływem pola magnetycznego, co czyni ją odpowiednią jako miękka sonda mechaniczna.
Magnetyczne pole, które zmienia kształt
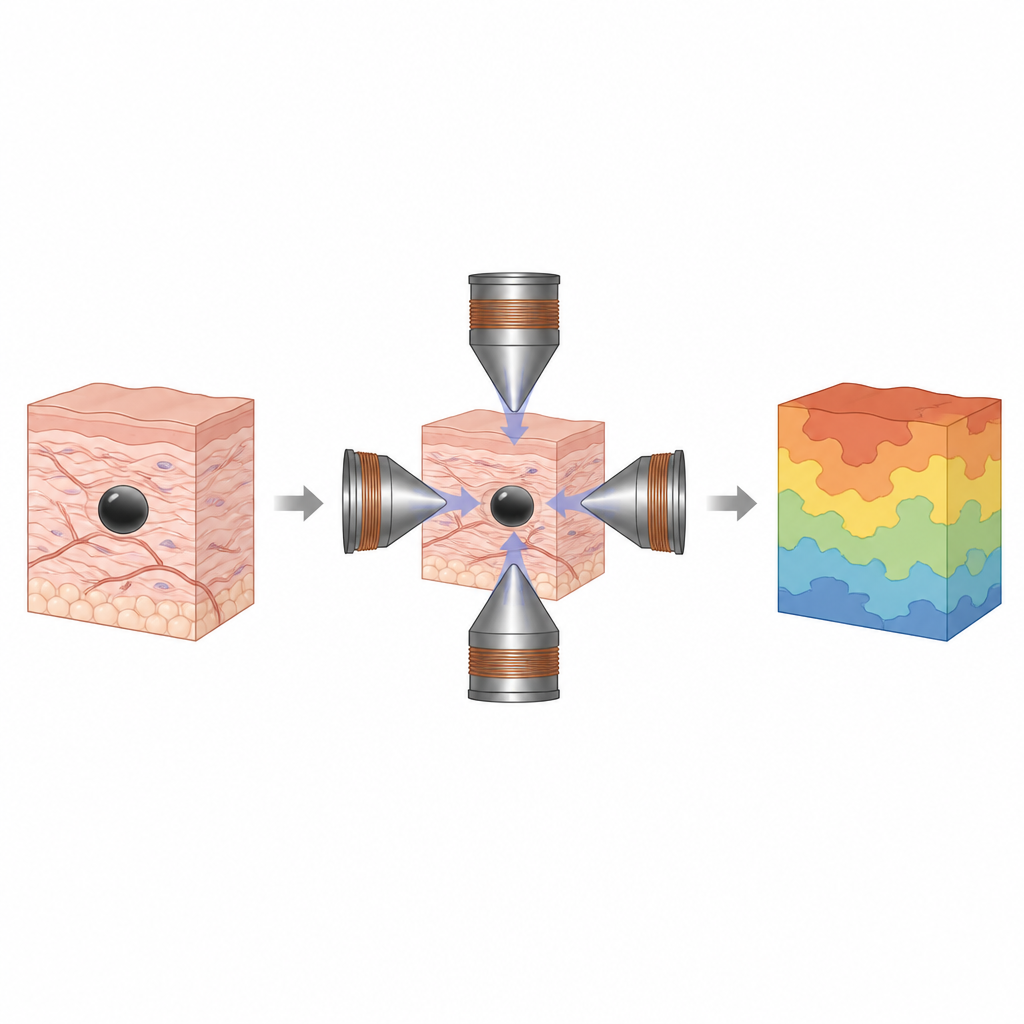
Aby sterować tą kroplą wewnątrz miękkich materiałów, zespół zbudował rekonfigurowalny system pęset magnetycznych z czterema elektromagnetycznymi biegunami, których rozstaw można regulować od 9 do 80 milimetrów. W szerokim ustawieniu pole magnetyczne ma duży gradient, który delikatnie przyciąga kroplę niczym zdalnie sterowany koralik, pozwalając jej na nawigację po dużym obszarze. W wąskim ustawieniu to samo urządzenie generuje silne, niemal jednorodne pole, które rozciąga kroplę w miejscu, nie przesuwając jej znacząco. Symulacje komputerowe i pomiary potwierdziły, że system może przełączać się między tymi trybami, utrzymując pole o korzystnych właściwościach w obszarze, gdzie znajduje się kropla, a pętla sprzężenia zwrotnego oparta na kamerze utrzymywała tor ruchu kropli w granicach ułamka jej własnego promienia.
Poczucie grubości i płynięcia wewnątrz miękkiej materii
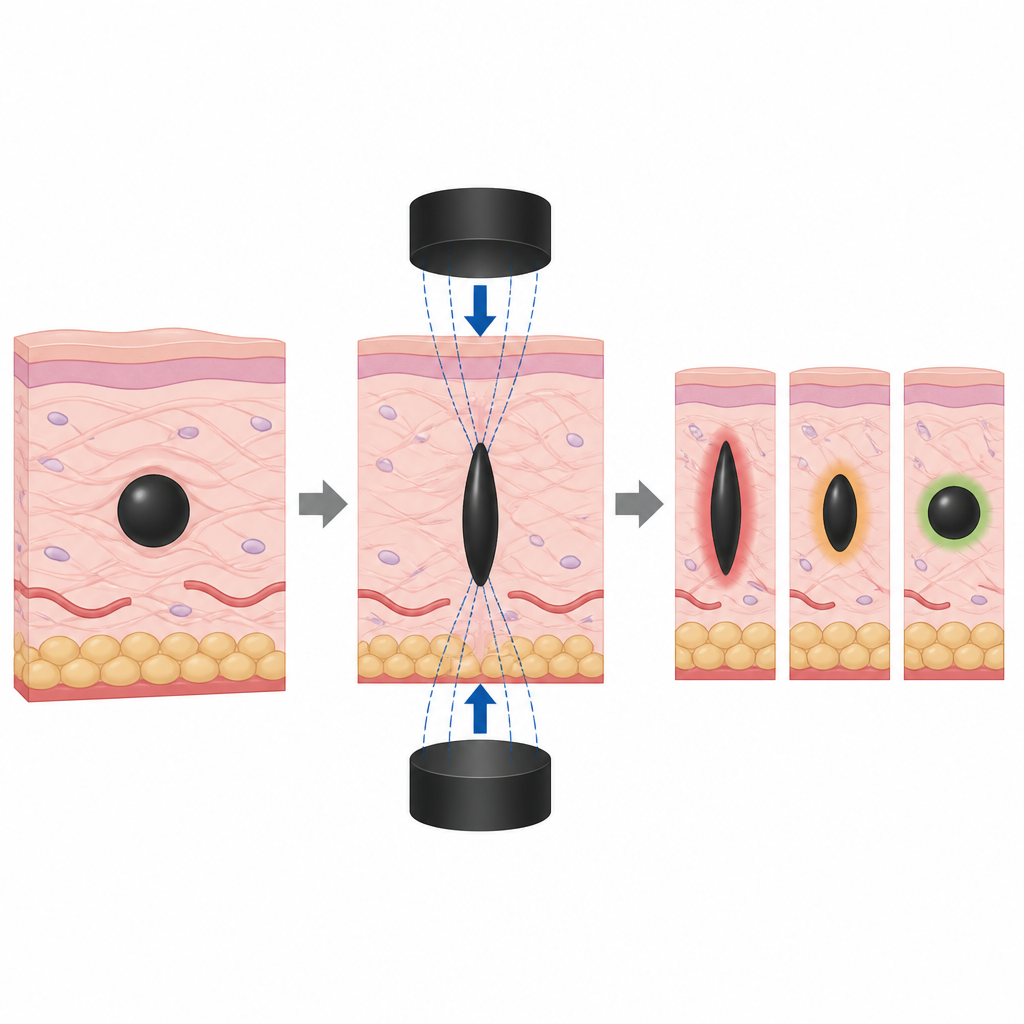
Gdy kropla dotrze do punktu zainteresowania, jednorodne pole magnetyczne ją odkształca, a sposób, w jaki jej kształt zmienia się w czasie, ujawnia, jak lepki i jak sprężysty jest otaczający materiał. Autorzy opisali to zachowanie prostym modelem mechanicznym zawierającym zarówno sprężyny elastyczne, jak i tłumiki lepkie, co uchwyciło sposób, w jaki kropla powoli się rozciąga, a potem ustala. Najpierw umieścili kroplę w roztworach wody z cukrem obejmujących szeroki zakres lepkości i wykazali, że zmierzone wartości zgadzają się ściśle ze standardowym wiskozymetrem — błędy typowo były poniżej dziesięciu procent, z wyjątkiem prawie czystej wody, gdzie istotna staje się ruchliwość losowa. Następnie zatopili kroplę w żelach agarowych o konsystencjach od bardzo miękkich do stosunkowo twardych i odtworzyli wartości sztywności, które zgadzały się z pomiarami z mechanicznego testera w zakresie przekraczającym trzy rzędy wielkości.
Testy w rzeczywistej tkance
Aby przybliżyć badania do warunków rzeczywistych, naukowcy wstrzyknęli kroplę ferrofluidu do małych bloków tkanki z kurczaka. Oświetlana od spodu sylwetka kropli była wyraźnie widoczna podczas rozciągania przez pole magnetyczne. Stosując tę samą analizę, oszacowali sztywność tkanki i porównali wyniki z konwencjonalnymi pomiarami poprzez wgłębnik, znajdując różnicę wynoszącą zaledwie około 1,6 procenta. Sukces ten sugeruje, że miękka kropla i regulowane magnesy mogą działać wspólnie wewnątrz złożonej, heterogenicznej tkanki bez znaczących uszkodzeń, dostarczając jednocześnie wiarygodnych odczytów mechanicznych.
Co to może oznaczać dla przyszłej medycyny
Podsumowując, badanie pokazuje, że delikatny mikrorobot z ferrofluidu, napędzany przez system pęset magnetycznych zmieniający kształt pola, może nawigować przez miękkie materiały i lokalnie wyczuwać ich lepkość oraz sprężystość z wysoką dokładnością. Dla laika oznacza to, że jesteśmy bliżej posiadania maleńkiego, sterowalnego „czujnika dotyku”, który potrafi mapować wewnętrzną twardość lub miękkość tkanek zamiast jedynie naciskać z zewnątrz. Przy dalszym rozwoju mniejsze krople, bardziej zaawansowane sterowanie magnetyczne i głębsze techniki obrazowania mogą przekształcić to podejście w potężne narzędzie do badania, jak choroby zmieniają mechanikę tkanek i do prowadzenia zabiegów w sposób minimalnie inwazyjny.
Cytowanie: Wang, Z., Wu, Z., Ploeg, HL. et al. Ferrofluid microrobot driven by an adjustable magnetic tweezer for soft tissue mechanical measurement. Microsyst Nanoeng 12, 180 (2026). https://doi.org/10.1038/s41378-026-01314-0
Słowa kluczowe: mikrorobot z ferrofluidu, pęsety magnetyczne, sztywność tkanek, pomiar lepkosprężysty, miękka robotyka