Clear Sky Science · sv
Ferrofluid-mikrorobot driven av en justerbar magnettång för mekanisk mätning av mjuk vävnad
Varför mjuka vävnader behöver skonsamma verktyg
Läkare och forskare förlitar sig i allt högre grad på hur mjuka eller fasta våra vävnader är för att förstå sjukdomar som cancer, men de verktyg som används för att mäta dessa egenskaper är ofta för styva och grova. Denna artikel presenterar en liten, vätskebaserad mikrorobot och ett smart magnetsystem som tillsammans erbjuder ett skonsammare, mer precist sätt att känna av de mekaniska egenskaperna hos mjuka vävnader utan att skada dem.
En liten droppe med ett stort uppdrag
I centrum för arbetet finns en droppe ferrofluid, en vätska som reagerar på magnetfält, gjord av biokompatibel vegetabilisk olja och magnetitnanopartiklar. Eftersom den är flytande anpassar sig droppen naturligt till omgivande vävnad istället för att sticka i den som en hård sond. Forskarna utformade noggrant ferrofluidens sammansättning så att nanopartiklarna förblir jämnt dispergerade och stabila i veckor, och de använde ett sprutsystem för att pålitligt forma droppar på cirka en millimeter i diameter. Tester visade att droppen behåller sin form i vattniga miljöer som liknar kroppen och deformeras jämnt när den utsätts för ett magnetfält, vilket gör den väl lämpad som en mjuk mekanisk probe.
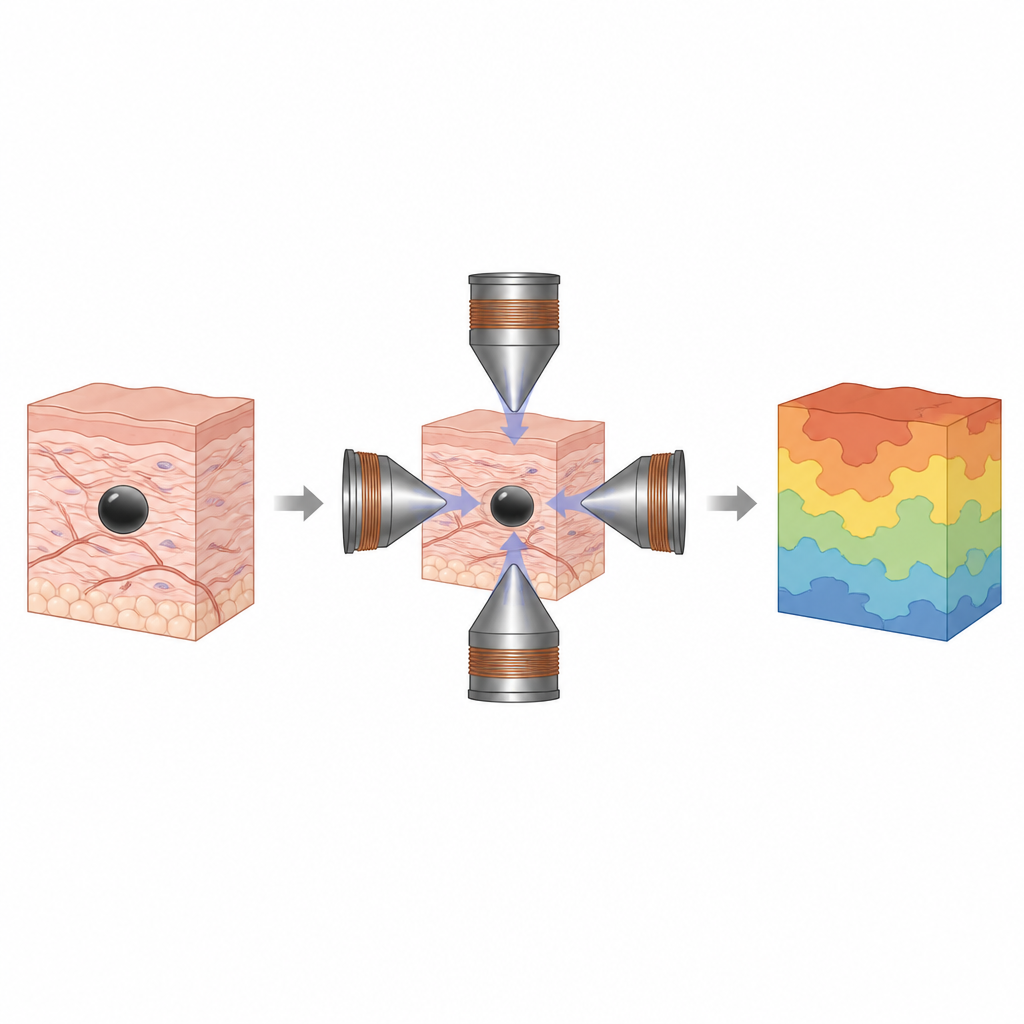
En formföränderlig magnetisk lekplats
För att kontrollera denna droppe inuti mjuka material byggde teamet ett omkonfigurerbart magnettångssystem med fyra elektromagnetiska poler vars avstånd kan justeras från 9 till 80 millimeter. I det breda läget har magnetfältet en stark gradient som försiktigt drar droppen runt som en radiostyrd pärla, vilket låter den navigera över ett stort område. I det snäva läget ger samma hårdvara ett starkt, nästan enhetligt fält som sträcker droppen på plats utan att förflytta den mycket. Datorbaserade simuleringar och mätningar bekräftade att systemet kan växla mellan dessa lägen samtidigt som fältet förblir väluppfört där droppen sitter, och en kamerabaserad återkopplingsslinga höll droppens bana inom en bråkdel av dess egen radie.
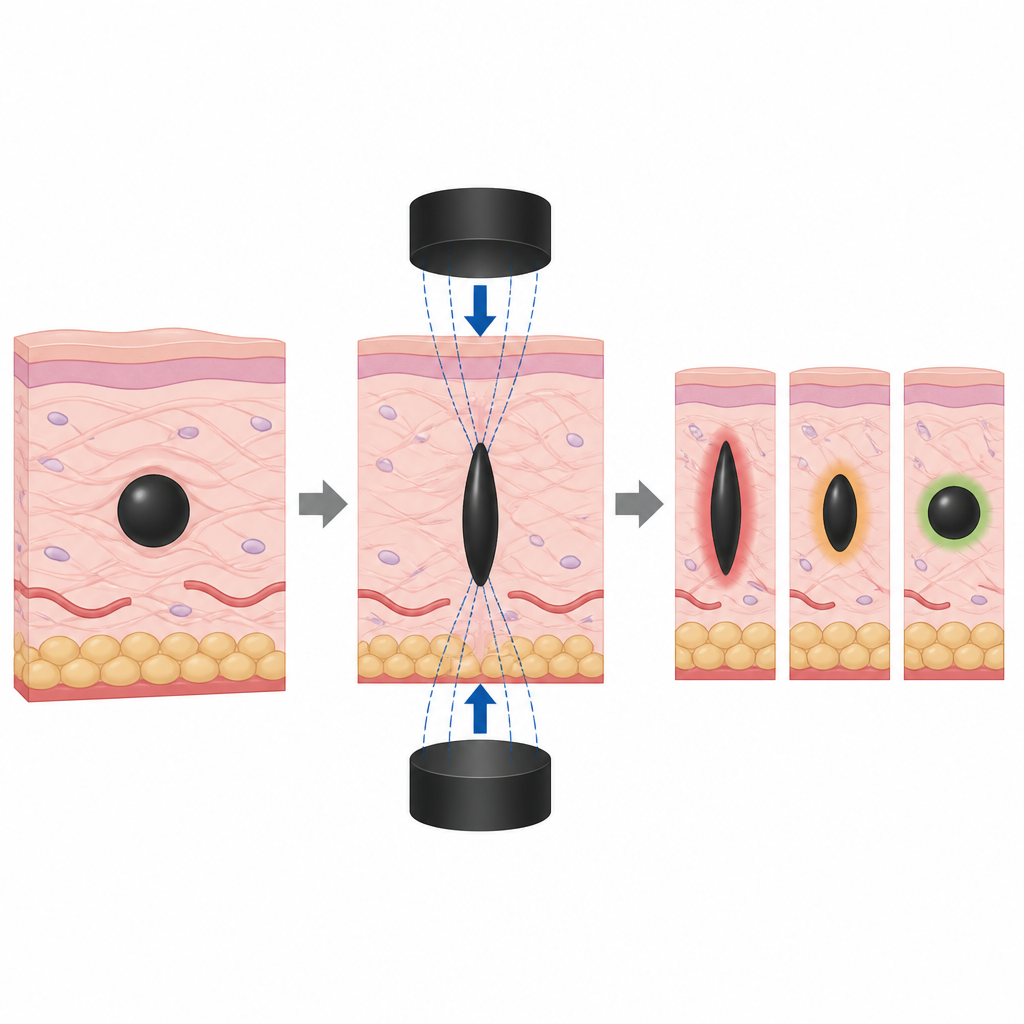
Känna tjocklek och flöde inuti mjukt material
När droppen når en intressepunkt deformeras den av det enhetliga magnetfältet, och hur dess form förändras över tid avslöjar hur trögflytande och hur fjädrande det omgivande materialet är. Författarna modellerade detta beteende med en enkel mekanisk bild som inkluderar både elastiska fjädrar och viskösa dämpare, vilket fångar hur droppen långsamt sträcks ut och sedan slår sig till ro. De placerade först droppen i socker-vattenlösningar som täcker ett brett spektrum av viskositeter och visade att de uppmätta viskositeterna stämde väl överens med en standardviskositetsmätare, med fel vanligtvis under tio procent utom i nästan rent vatten där slumpmässig rörelse blir viktig. Nästa steg var att bädda in droppen i agar-geler som varierade från mycket mjuka till relativt fasta och återfå styvhetsvärden som överensstämde med de från en mekanisk testare över mer än tre storleksordningar.
Testning i riktig vävnad
För att komma närmare verkliga förhållanden injicerade forskarna ferrofluiddroppen i små block av kycklingbröstvävnad. Belyst nedefrån kunde droppens kontur fångas tydligt medan magnetfältet sträckte den. Med samma analys uppskattade de vävnadens styvhet och jämförde den med konventionella indenteringsmätningar, och fann en skillnad på endast omkring 1,6 procent. Denna framgång tyder på att den mjuka droppen och de justerbara magneterna kan fungera tillsammans i komplex, heterogen vävnad utan att orsaka nämnvärd skada, samtidigt som de ger tillförlitliga mekaniska avläsningar.
Vad detta kan betyda för framtidens medicin
Sammanfattningsvis visar denna studie att en skonsam ferrofluid-mikrorobot, driven av ett formföränderligt magnettångssystem, kan navigera genom mjuka material och lokalt känna av hur viskösa och elastiska de är med hög noggrannhet. För en lekmann innebär det att vi är närmare att ha en liten, styrbar "beröringssensor" som kan kartlägga hur fasta eller mjuka vävnader är inifrån, istället för att bara trycka utifrån. Med fortsatt utveckling — mindre droppar, rikare magnetisk kontroll och djupare avbildning — skulle tillvägagångssättet kunna bli ett kraftfullt verktyg för att studera hur sjukdomar förändrar vävnadens mekanik och för att styra behandlingar på ett minimalt invasivt sätt.
Citering: Wang, Z., Wu, Z., Ploeg, HL. et al. Ferrofluid microrobot driven by an adjustable magnetic tweezer for soft tissue mechanical measurement. Microsyst Nanoeng 12, 180 (2026). https://doi.org/10.1038/s41378-026-01314-0
Nyckelord: ferrofluid-mikrorobot, magnettänger, vävnadsstyvhet, viskoelastisk mätning, mjuka robotar