Clear Sky Science · ru
Микроробот на феррофлюиде, управляемый настраиваемыми магнитными щипцами, для механических измерений мягких тканей
Почему мягким тканям нужны бережные инструменты
Врачи и исследователи всё чаще опираются на информацию о том, насколько мягкие или жесткие наши ткани, чтобы понять заболевания, такие как рак, но инструменты для измерения этих свойств часто слишком жесткие и грубые. В этой работе представлен крошечный жидкостной микроробот и интеллектуальная магнитная система, которые вместе предлагают более бережный и точный способ «ощупывать» механические свойства мягких тканей без их повреждения.
Крошечная капля с большой задачей
В основе работы — капля феррофлюида, жидкости, реагирующей на магнитные поля, изготовленная из биосовместимого растительного масла и наночастиц магнетита. Поскольку она жидкая, капля естественно принимает форму окружающей ткани, а не протыкает её, как жесткий зонд. Исследователи тщательно разработали состав феррофлюида так, чтобы наночастицы равномерно распределялись и оставались стабильными в течение недель, и использовали систему шприца для надежного формирования капель примерно одного миллиметра в диаметре. Испытания показали, что капля сохраняет форму в водных средах, похожих на внутренние условия организма, и плавно деформируется под действием магнитного поля, что делает её подходящим мягким механическим зондом.
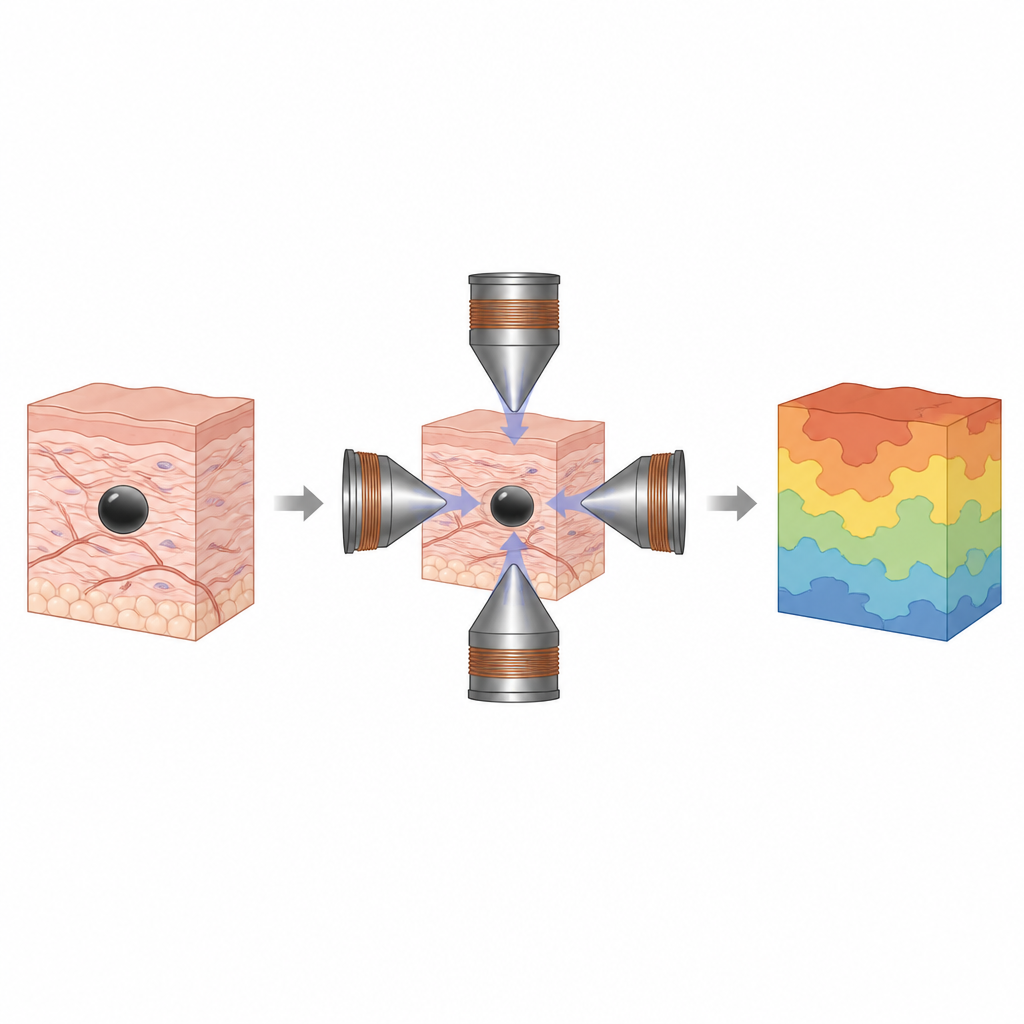
Магнитная площадка, меняющая форму
Для управления каплей внутри мягких материалов команда создала перенастраиваемую систему магнитных щипцов с четырьмя электромагнитными полюсами, расстояние между которыми можно регулировать от 9 до 80 миллиметров. В широком положении магнитное поле имеет сильный градиент, который мягко тянет каплю, как шарик с дистанционным управлением, позволяя ей перемещаться по большой площади. В узком положении то же оборудование создаёт сильное, почти однородное поле, которое растягивает каплю на месте, не перемещая её заметно. Компьютерные моделирования и измерения подтвердили, что система может переключаться между этими режимами, сохраняя хорошо себя ведущее поле в области расположения капли, а контурная система с камерой удерживала траекторию капли в пределах доли её собственного радиуса.
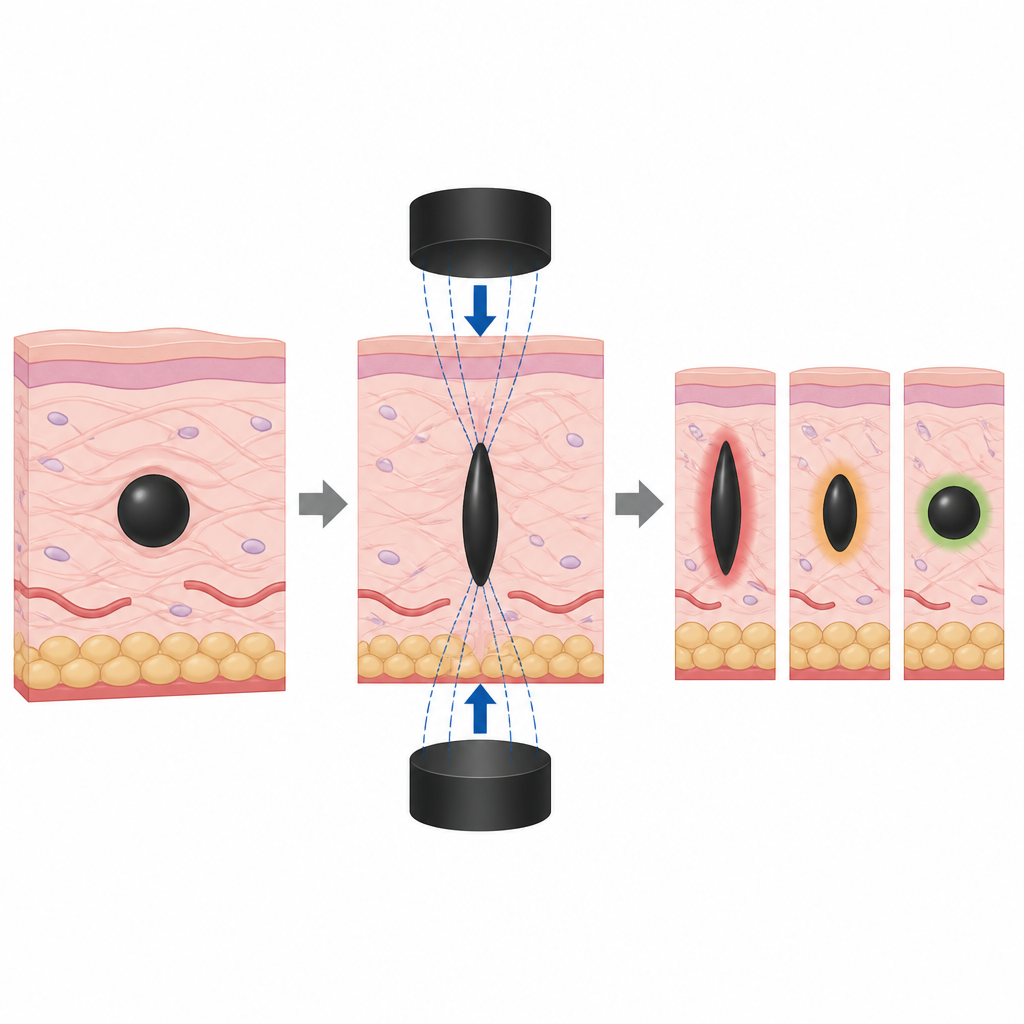
Ощущение вязкости и упругости внутри мягких материалов
Когда капля достигает точки интереса, однородное магнитное поле деформирует её, и то, как меняется её форма с течением времени, раскрывает, насколько вязким и упругим является окружающий материал. Авторы смоделировали это поведение с помощью простой механической схемы, включающей как упругие пружины, так и вязкие демпферы, отражающей, как капля медленно растягивается, а затем устанавливается. Сначала они поместили каплю в растворы сахарной воды с широким диапазоном вязкостей и показали, что измеренные вязкости хорошо согласуются со стандартным вискозиметром: погрешности обычно ниже десяти процентов, за исключением почти чистой воды, где случайное броуновское движение становится значимым. Затем каплю внедрили в агарные гели от очень мягких до относительно жестких и восстановили значения жесткости, которые совпадали с показаниями механического тестера в диапазоне более чем трёх порядков величины.
Испытания в реальной ткани
Чтобы приблизиться к реальным условиям, исследователи вводили каплю феррофлюида в маленькие блоки куриного филе. Освещённая снизу, граница капли хорошо фиксировалась при растягивании магнитным полем. Используя тот же анализ, они оценивали жесткость ткани и сравнивали результаты с обычными измерениями методом индентации, обнаружив разницу всего около 1.6 процента. Этот успех указывает на то, что мягкая капля и настраиваемые магниты могут работать внутри сложной, неоднородной ткани без заметного повреждения, при этом давая надёжные механические показания.
Что это может значить для медицины будущего
В целом исследование показывает, что бережный микроробот на феррофлюиде, управляемый системой магнитных щипцов с изменяемой конфигурацией, может перемещаться внутри мягких материалов и локально определять их вязкие и упругие свойства с высокой точностью. Для неспециалиста это означает, что мы стали ближе к появлению крошечного управляемого «сенсора прикосновения», способного картировать внутреннюю плотность или мягкость тканей изнутри, а не только при внешнем ощупывании. С дальнейшей доработкой — уменьшением размера капель, расширением магнитного управления и улучшением визуализации — этот подход может превратиться в мощный инструмент для изучения того, как болезни меняют механику тканей, и для минимально инвазивного сопровождения лечения.
Цитирование: Wang, Z., Wu, Z., Ploeg, HL. et al. Ferrofluid microrobot driven by an adjustable magnetic tweezer for soft tissue mechanical measurement. Microsyst Nanoeng 12, 180 (2026). https://doi.org/10.1038/s41378-026-01314-0
Ключевые слова: микроробот на феррофлюиде, магнитные щипцы, жесткость ткани, вязкоупрутые измерения, мягкая робототехника