Clear Sky Science · he
מיקרורובוט פררו-נוזלי מונע בעזרת פינצטה מגנטית מתכווננת למדידת מכאניקה של רקמות רכות
מדוע רקמות רכות דורשות כלי עדין
רופאים וחוקרים סומכים יותר ויותר על מידת הרכות או הקשיחות של רקמות כדי להבין מחלות כמו סרטן, אך הכלים המשמשים למדידה לעתים קרובות נוקשים ומחוספסים מדי. מאמר זה מציג מיקרורובוט זעיר מבוסס נוזל ומערכת מגנטית חכמה שמציעים יחד דרך עדינה ומדויקת יותר "להרגיש" את התכונות המכאניות של רקמות רכות ללא גרימת נזק.
טיפה זעירה עם משימה גדולה
בלב העבודה עומדת טיפת פררו-נוזל, נוזל המגיב לשדות מגנטיים, המורכבת משמן צמחי ביוקומפטיבי וגרגירי מגנטיט. מכיוון שהיא נוזלית, הטיפה מתאימה את צורתה באופן טבעי לרקמה הסובבת במקום לדקור אותה כמו גוש קשיח. החוקרים תכננו בקפידה את רכיבי הפררו-נוזל כך שהננו־חלקיקים יישארו מפוזרים באופן אחיד ויציבים למשך שבועות, והשתמשו במערכת מזרק ליצירת טיפות בעקביות בקוטר של בערך מילימטר אחד. ניסויים הראו שהטיפה שומרת על צורתה בסביבה מימית הדומה לגוף ומתעוותת בצורה חלקה כאשר נחשפת לשדה מגנטי, מה שהופך אותה למתאימה בתור חיישן מכאני רך.
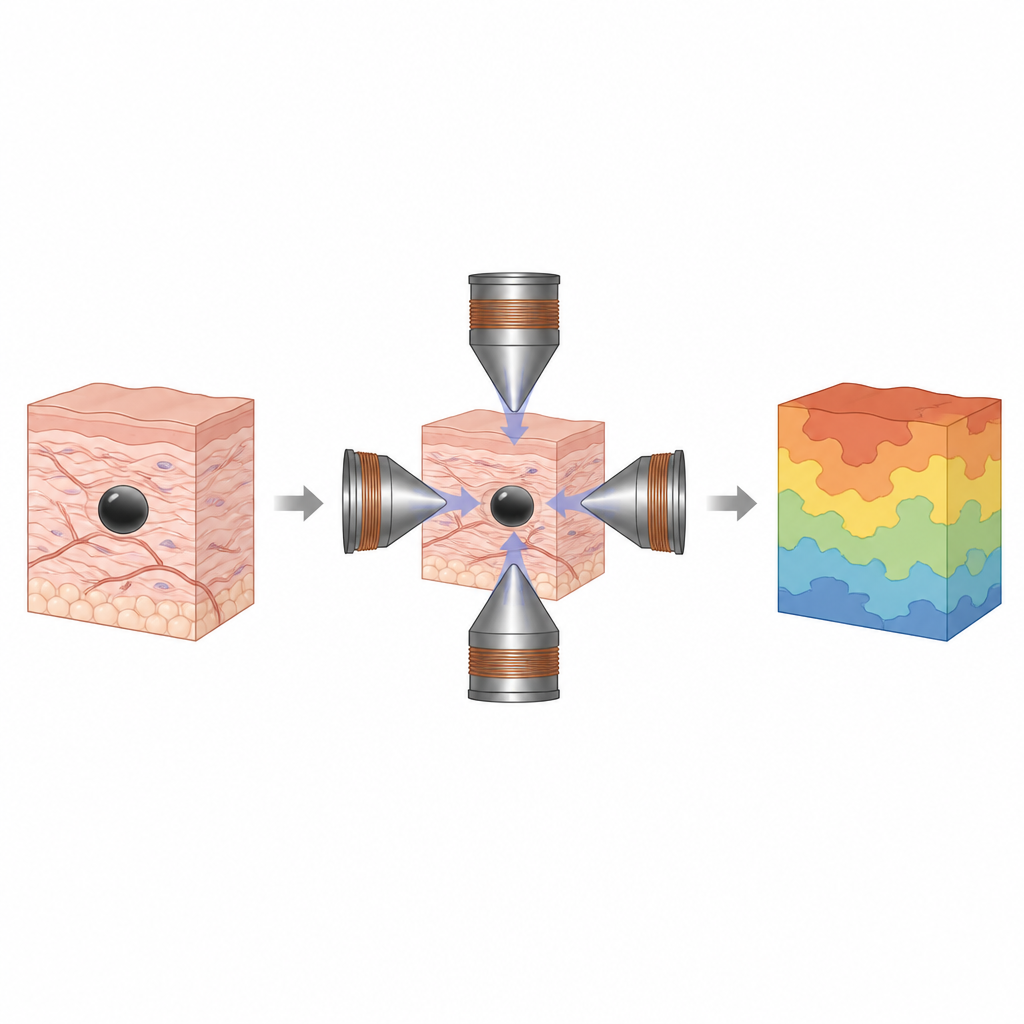
מגרש משחקים מגנטי שמשנה צורה
כדי לשלוט בטיפה בתוך חומרים רכים, הצוות בנה מערכת פינצטה מגנטית רה-קונפיגורבילית עם ארבעה עמודים אלקטרומגנטיים שהמרחק ביניהם ניתן להתאמה מ-9 עד 80 מילימטר. במצב רחב, השדה המגנטי יוצר גרדיינט חזק שמושך בעדינות את הטיפה כחרוז בשליטה מרחוק, מה שמאפשר לה לנווט על פני שטח גדול. במצב צפוף, אותו הציוד מייצר שדה חזק וכמעט אחיד הממתח את הטיפה במקום מבלי להזיז אותה הרבה. סימולציות מחשב ומדידות אישרו שהמערכת יכולה לעבור בין המצבים האלה תוך שמירה על שדה מסודר באזור שבו הטיפה נמצאת, ולולאת משוב מבוססת מצלמה שמרה על מסלול הטיפה בתוך חלק קטן מרדיוס הטיפה עצמה.
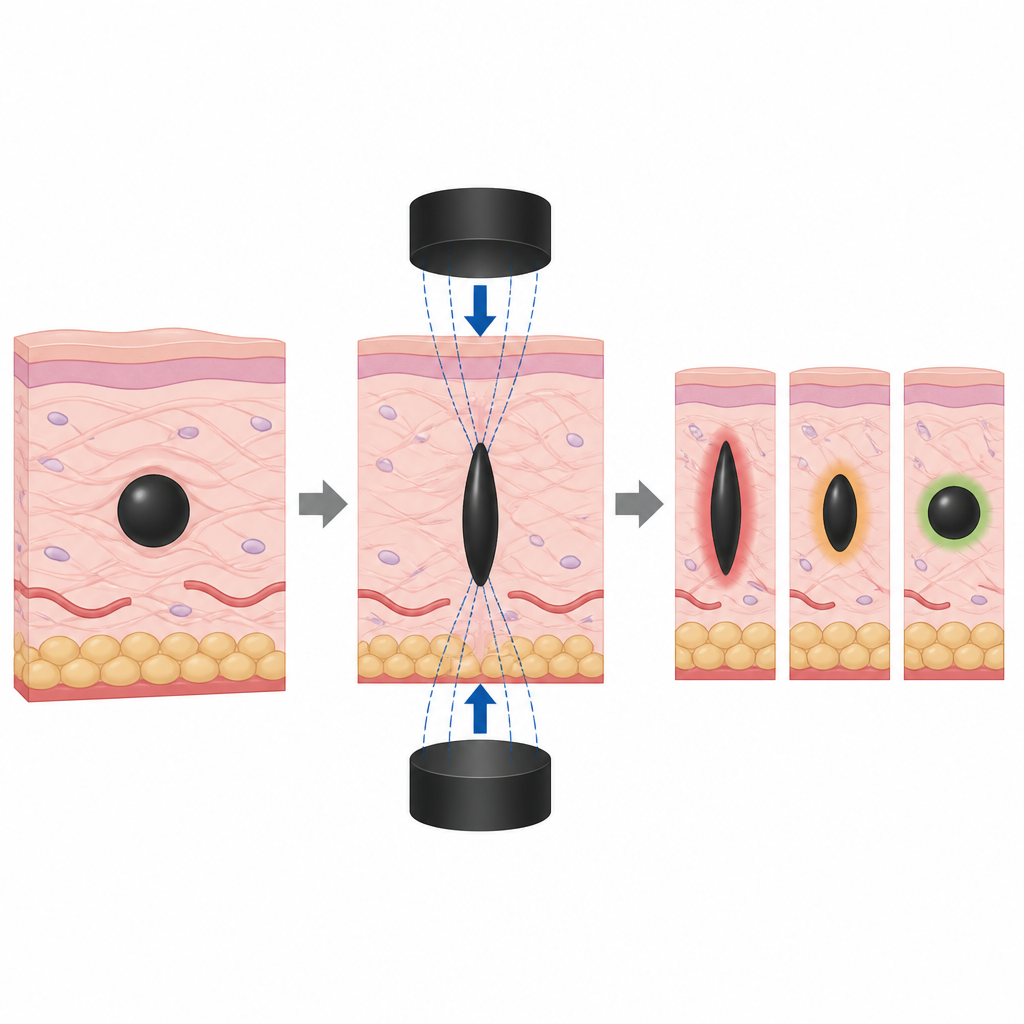
להרגיש צפיפות וזרימה בתוך חומר רך
כאשר הטיפה מגיעה לנקודת עניין, השדה המגנטי האחיד מעוות אותה, ואופן שינוי צורתה לאורך זמן חושף עד כמה החומר הסובב דחוס וכיצד הוא קפיצי. המחברים תיארו התנהגות זו באמצעות מודל מכאני פשוט הכולל קפיצים אלסטיים ודמפרים צמיגיים, שתיאר כיצד הטיפה נמתחת לאט ואז מתייצבת. תחילה הם הניחו את הטיפה בתמיסות מים-סוכר המשתרעות על טווח רחב של צמיגויות והראו שהצמיגויות הנמדדות הסכימו מקרוב עם ויזקומטר סטנדרטי, עם שגיאות בדרך כלל מתחת לעשרה אחוזים פרט למים כמעט טהורים, שם התנועה הרנדומלית משפיעה. לאחר מכן הם הטמינו את הטיפה בג'לים של אגאר בטווחים ממרכים מאוד עד יחסית קשים והשיבו ערכי קשיות שתואמים למדידות ממכשיר מכני על פני יותר משלוש סדרי גודל.
בדיקות ברקמה אמיתית
כדי להתקרב לתנאים בעולם האמיתי, החוקרים הזריקו את טיפת הפררו-נוזל לגושי חזה עוף קטנים. בהארה מלמטה ניתן היה ללכוד בבירור את קווי המתאר של הטיפה בזמן שהשדה המגנטי המתיחה אותה. באמצעות אותו ניתוח הם העריכו את קשיות הרקמה והשוו אותה למדידות חרטום קונבנציונליות, ומצאו הבדל של כ-1.6 אחוז בלבד. הצלחה זו מרמזת שהטיפה הרכה והמגנטים המתכווננים יכולים לפעול יחד בתוך רקמות מורכבות והטרוגניות ללא גרימת נזק משמעותי, ובכל זאת לספק קריאות מכאניות מהימנות.
מה זה יכול לעשות לרפואה העתידית
בסך הכל, המחקר מראה שמיקרורובוט פררו-נוזלי עדין, מונע על ידי מערכת פינצטה מגנטית שמשנה צורה, יכול לנווט דרך חומרים רכים ולמדוד מקומית עד כמה הם צמיגיים ואלסטיים בדיוק גבוה. עבור קורא שאינו מומחה, משמעות הדבר היא שאנחנו מתקרבים למימוש "חיישן מישוש" זעיר ומנוהל שיכול למפות מבפנים עד כמה רקמות קשיחות או רכות, במקום להפעיל לחץ רק מבחוץ. עם פיתוח נוסף, טיפיות קטנות יותר, שליטה מגנטית עשירה יותר ודימות בעומק, גישה זו עשויה להפוך לכלי חזק לחקר כיצד מחלות משנות את מכניקת הרקמות ולכוון טיפולים בצורה פגיעה מינימלית.
ציטוט: Wang, Z., Wu, Z., Ploeg, HL. et al. Ferrofluid microrobot driven by an adjustable magnetic tweezer for soft tissue mechanical measurement. Microsyst Nanoeng 12, 180 (2026). https://doi.org/10.1038/s41378-026-01314-0
מילות מפתח: מיקרורובוט פררו-נוזלי, פינצטות מגנטיות, קשיות רקמה, מדידת ויסקואלקסטיות, רובוטיקה רכה