Clear Sky Science · fr
Microrobot en ferrofluide animé par une pince magnétique ajustable pour la mesure mécanique des tissus mous
Pourquoi les tissus mous ont besoin d’outils délicats
Médecins et chercheurs s’appuient de plus en plus sur la souplesse ou la rigidité des tissus pour comprendre des maladies comme le cancer, mais les instruments utilisés pour mesurer ces propriétés sont souvent trop rigides et abrasifs. Cet article présente un microrobot liquide et un système magnétique intelligent qui offrent ensemble une manière plus douce et plus précise d’explorer les propriétés mécaniques des tissus mous sans les endommager.
Une minuscule goutte aux grandes responsabilités
Au cœur de ce travail se trouve une goutte de ferrofluide, un liquide réactif aux champs magnétiques, composée d’huile végétale biocompatible et de nanoparticules de magnétite. Parce qu’elle est fluide, cette goutte s’adapte naturellement au tissu environnant au lieu de le piquer comme une sonde rigide. Les chercheurs ont formulé le ferrofluide de façon à ce que les nanoparticules restent uniformément dispersées et stables pendant des semaines, et ils ont utilisé un système de seringue pour former de façon fiable des gouttes d’environ un millimètre de diamètre. Les tests ont montré que la goutte conserve sa forme dans des environnements aqueux proches de ceux du corps et se déforme en douceur sous l’action d’un champ magnétique, ce qui la rend bien adaptée comme sonde mécanique souple.
Un terrain magnétique qui change de forme
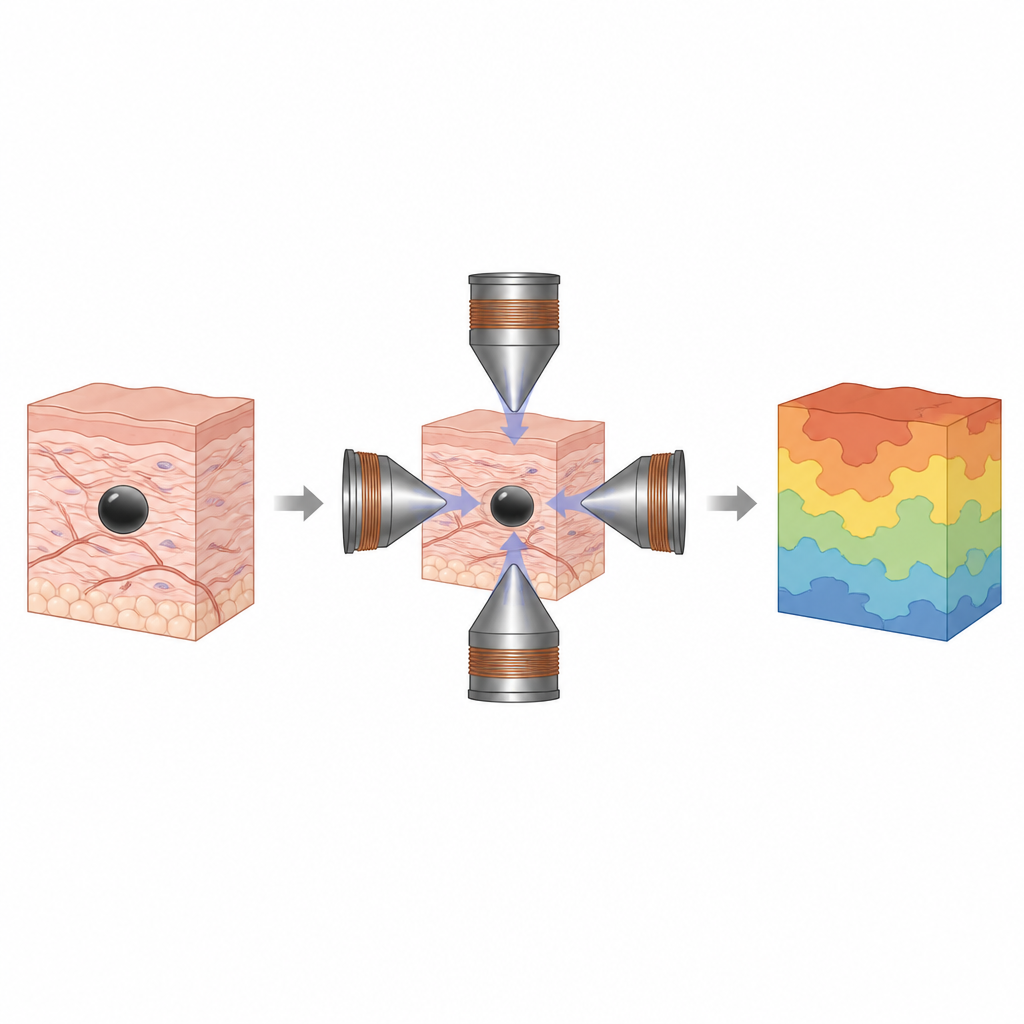
Pour contrôler cette goutte à l’intérieur de matériaux mous, l’équipe a construit un système de pinces magnétiques reconfigurable à quatre pôles électromagnétiques dont l’écartement peut être ajusté de 9 à 80 millimètres. En position large, le champ magnétique présente un fort gradient qui attire doucement la goutte comme une perle télécommandée, lui permettant de se déplacer sur une grande zone. En position serrée, le même matériel produit un champ fort et presque uniforme qui étire la goutte sur place sans la déplacer significativement. Simulations et mesures ont confirmé que le système peut basculer entre ces modes tout en conservant un champ bien maîtrisé là où se trouve la goutte, et une boucle de rétroaction basée sur caméra maintenait la trajectoire de la goutte à une fraction de son propre rayon.
Mesurer l’épaisseur et l’écoulement à l’intérieur de la matière molle
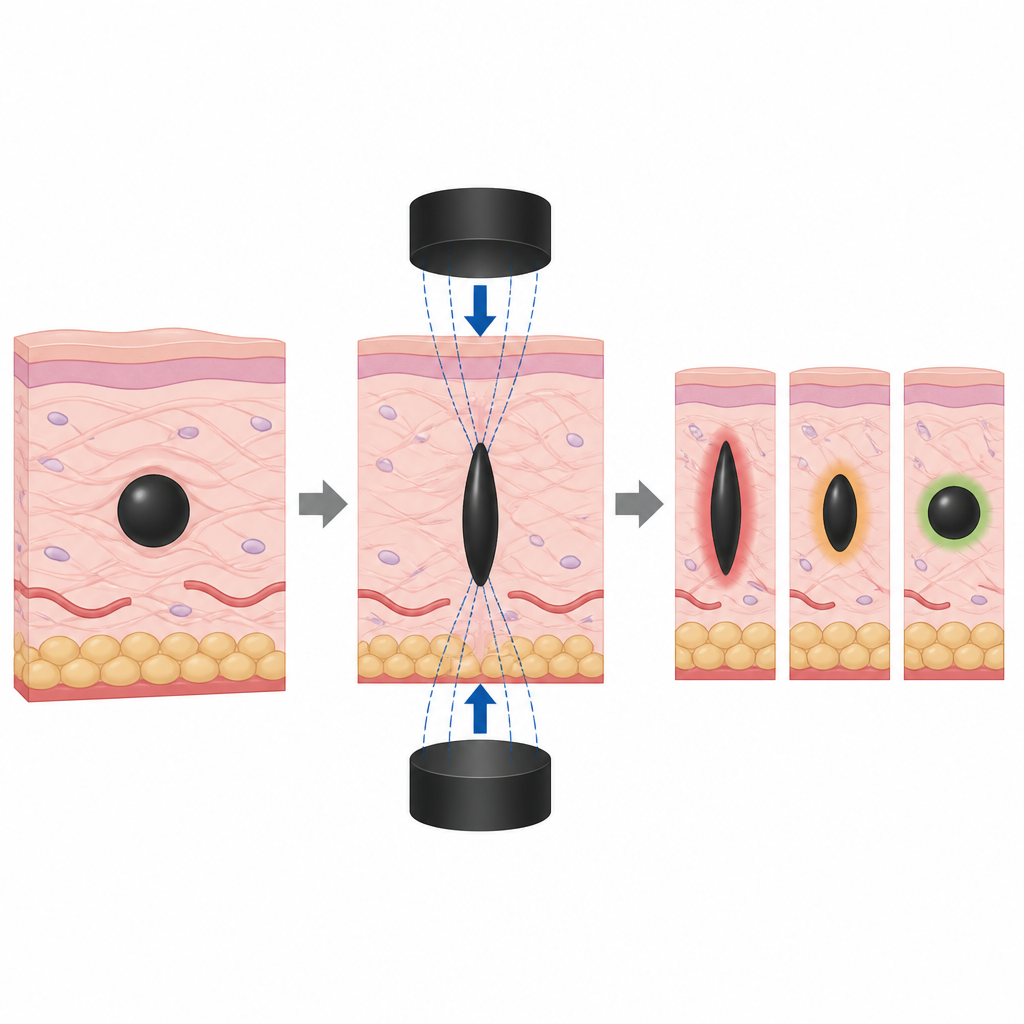
Une fois la goutte arrivée au point d’intérêt, le champ magnétique uniforme la déforme, et la façon dont sa forme évolue dans le temps révèle à la fois la viscosité et l’élasticité du matériau environnant. Les auteurs ont modélisé ce comportement avec un schéma mécanique simple incluant à la fois des ressorts élastiques et des amortisseurs visqueux, capturant la manière dont la goutte s’étire lentement puis se stabilise. Ils ont d’abord placé la goutte dans des solutions eau-sucre couvrant une large gamme de viscosités et montré que les valeurs mesurées concordaient étroitement avec un viscosimètre standard, avec des erreurs généralement inférieures à dix pour cent, sauf dans l’eau quasiment pure où les mouvements aléatoires deviennent importants. Ensuite, ils ont incorporé la goutte dans des gels d’agar allant de très mous à relativement fermes et ont retrouvé des valeurs de raideur correspondant à celles d’un testeur mécanique sur plus de trois ordres de grandeur.
Essais dans de vrais tissus
Pour se rapprocher de conditions réelles, les chercheurs ont injecté la goutte de ferrofluide dans de petits blocs de poitrine de poulet. Éclairée par en dessous, la silhouette de la goutte pouvait être capturée clairement pendant que le champ magnétique l’étirait. À l’aide de la même analyse, ils ont estimé la rigidité du tissu et l’ont comparée à des mesures d’indentation conventionnelles, trouvant une différence d’environ seulement 1,6 %. Ce succès suggère que la goutte souple et les aimants ajustables peuvent fonctionner ensemble dans des tissus complexes et hétérogènes sans causer de dommages notables, tout en fournissant des mesures mécaniques fiables.
Ce que cela pourrait signifier pour la médecine future
Dans l’ensemble, cette étude montre qu’un microrobot doux en ferrofluide, piloté par un système de pinces magnétiques modulable, peut naviguer à travers des matériaux mous et sonder localement leur viscosité et leur élasticité avec une grande précision. Pour un non-spécialiste, cela signifie que nous sommes plus proches d’un petit « capteur de contact » orientable capable de cartographier la fermeté des tissus de l’intérieur, plutôt que de n’évaluer que depuis l’extérieur. Avec un développement supplémentaire — gouttes plus petites, contrôle magnétique plus riche et imagerie en profondeur — cette approche pourrait devenir un outil puissant pour étudier comment les maladies modifient la mécanique des tissus et pour guider des traitements de façon peu invasive.
Citation: Wang, Z., Wu, Z., Ploeg, HL. et al. Ferrofluid microrobot driven by an adjustable magnetic tweezer for soft tissue mechanical measurement. Microsyst Nanoeng 12, 180 (2026). https://doi.org/10.1038/s41378-026-01314-0
Mots-clés: microrobot en ferrofluide, pinces magnétiques, rigidité tissulaire, mesure viscoélastique, robotique douce