Clear Sky Science · sv
Hudens mekanikers roll för variation i kontaktkrafter under olika friktionsförhållanden
Varför fingertoppens första beröring spelar roll
Varje gång du plockar upp ett vått glas eller sveper över din telefon avgör dina fingertoppar direkt hur hal ytan är och justerar greppet så att föremålet varken glider eller krossas. Vi tillskriver vanligen denna skicklighet hjärnan och nerverna som känner av glidning och snabbt spänner greppet. Denna studie ställer en mer subtil fråga: innan hjärnan hinner reagera, kan hudens mjuka, eftergivliga mekanik redan påverka hur säkert vi håller saker?
Händer som inbyggda säkerhetssystem
Forskarnas fokus låg på den allra första bråkdelen av en sekund när en fingertopp tar kontakt med ett föremål. Under detta korta fönster har nervsystemet ännu inte bearbetat beröringssignaler, så greppet styrs i hög grad av den fysiska interaktionen mellan hud och yta. För att isolera denna tidiga fas registrerade teamet först naturliga räck-och-grip-rörelser när personer lyfte ett litet föremål med tumme och pekfinger. De spelade sedan upp samma rörelsemönster på fingertopparna hos nya försökspersoner med en robotanordning som pressade och drog en glasskiva över fingerpulpan under kontrollerade förhållanden, medan fingret själv var stilla. Genom att slå på och av ultraljudsvibrationer i glaset kunde de växla mellan en högfriktions- (greppig) och en lågfriktions- (hal) yta utan att ändra något annat.
Att iaktta krafter och hudglidning
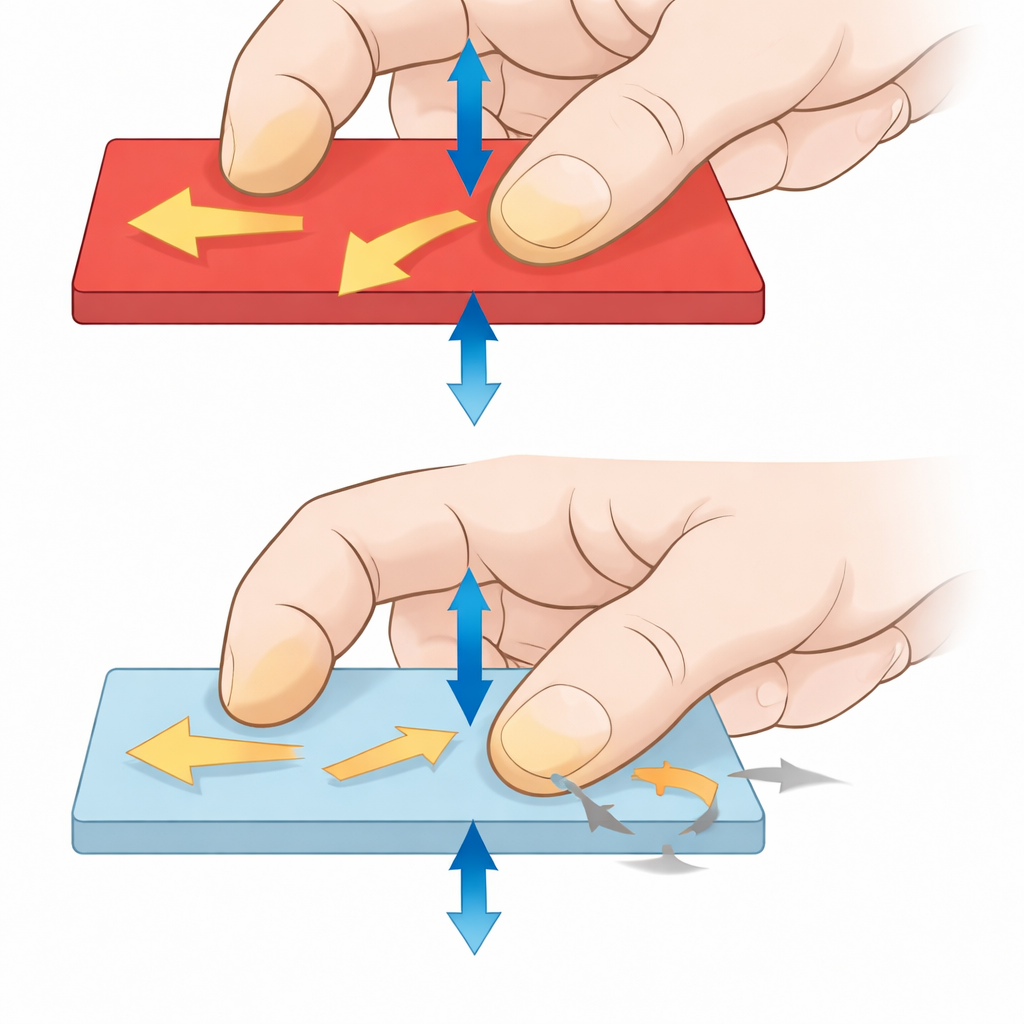
Under dessa robotstyrda beröringar mätte forskarna krafterna vid fingertoppen och filmade huden genom det klara glaset med en högfartskamera. Detta gjorde det möjligt att följa små rörelser i fingeravtryckens åsar och se vilka hudområden som fastnade mot glaset och vilka som gled. De fann att den kraft som tryckte rakt in i fingret (normal kraft) utvecklades på ungefär samma sätt oavsett om ytan var greppig eller hal. Däremot växte den sidledes kraften längs ytan (tangentiell kraft), som är relaterad till den belastning ett föremål tål innan det glider, långsammare och nådde ett lägre maxvärde på den hala ytan. Som en följd var förhållandet mellan normal- och tangentiell kraft högre på hal glas, vilket ekar det som ses när människor aktivt spänner greppet om ett glatt föremål.
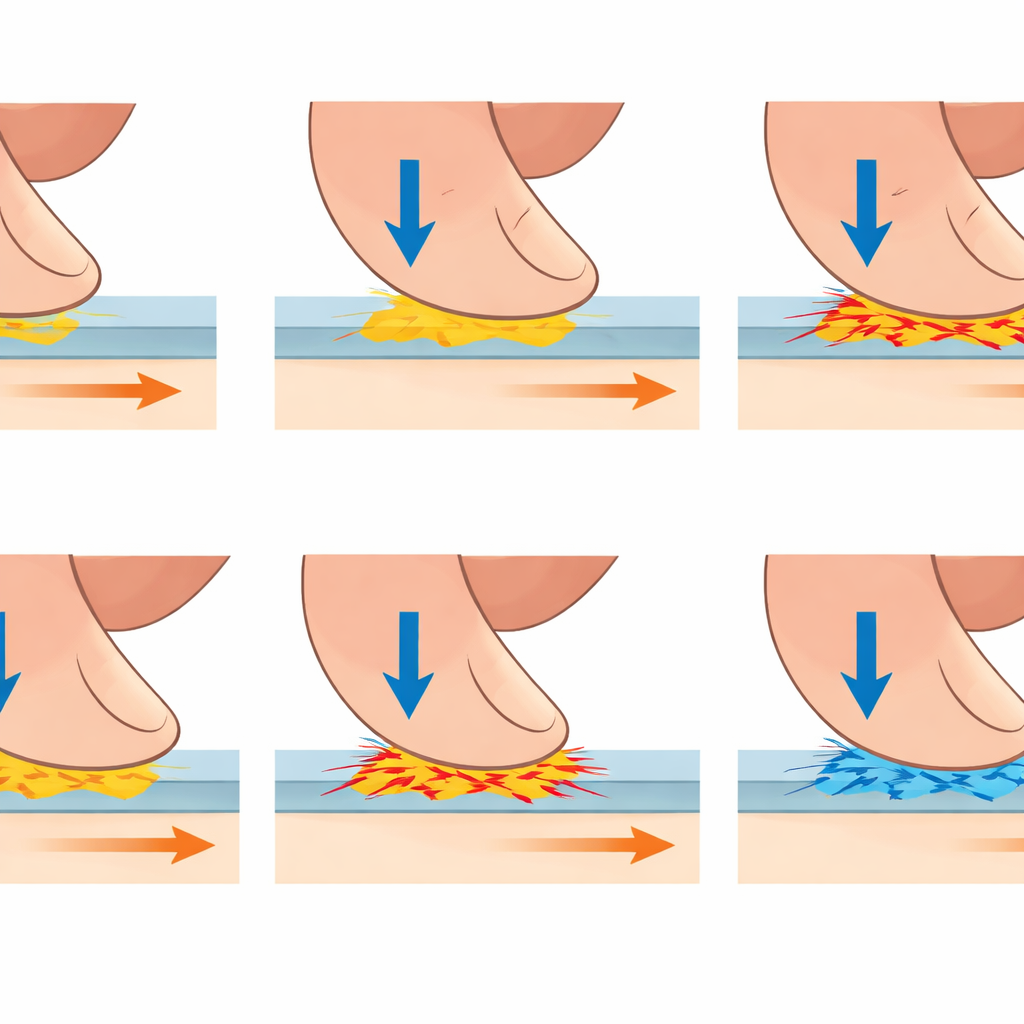
Delvis glidning som en dold aktör
Videorna visade att huden aldrig beter sig som ett styvt block fastlimmat mot ytan. Istället glider delar av kontaktområdet medan andra delar sitter fast redan från kontaktens början, och detta mönster förändras allt eftersom beröringen fortlöper. På både greppigt och halt glas krympte det glidna området initialt när ett ökande intryckstryck fick mer hud att fästa, för att sedan växa igen när sidledsrörelsen byggdes upp. På den lågfriktionsyta däremot, gled en större andel av kontaktregionen och den totala sträcka som hudfläckarna förflyttade sig var större. Dessa större glidningar var nära kopplade till den svagare och långsammare uppbyggnaden av sidkraft: när hudfläckar släpper taget och glider frigörs skjuvspänning och hindrar tangentiell kraft från att stiga lika snabbt.
Timing och rörelseform formar tidigt grepp
Eftersom roboten spelade upp många olika naturliga rörelsemönster kunde studien också testa hur den relativa timingen mellan intryck och glidrörelse påverkade vad som hände i huden. När sidledsrörelsen började senare — efter att plattan redan pressat djupare in i fingret — fanns mer kontaktarea och starkare fäste, vilket minskade glidning. Under hala förhållanden hade denna timing särskilt stor betydelse: små förändringar i när glidningen startade kunde märkbart förändra hur stor del av huden som gled och hur fördröjd sidkraften blev. Över förhållandena hängde större glidytor och längre glidrörelser ihop med längre fördröjningar och lägre värden av tangentiell kraft.
Vad detta betyder för vardagligt grepp
Tillsammans visar fynden att fingertoppens mjuka mekanik bidrar till att forma greppkrafterna innan hjärnan hinner ingripa. På hala ytor begränsar större partiell glidning naturligt hur snabbt sidkrafter kan växa, vilket effektivt förskjuter kraftbalansen mot att trycka in snarare än att dra längs ytan. Detta inbyggda beteende kan hjälpa till att stabilisera vårt grepp under de första tiotals millisekunderna av kontakt och vinna tid för långsammare, nervstyrda korrigeringar. Att förstå dessa huddrivna effekter kan vägleda designen av bättre proteshänder, haptiska pekskärmar och robotgreppare som, likt våra egna fingertoppar, förlitar sig lika mycket på fysik som på återkoppling för att hålla fast världen.
Citering: Devecioğlu, İ., Ruhi, R., Afzal, N. et al. The role of skin mechanics in contact force variation under different friction conditions. Sci Rep 16, 11481 (2026). https://doi.org/10.1038/s41598-026-41781-z
Nyckelord: greppkontroll, fingerpulpa friktion, hudmekanik, taktil känsel, objekthantering