Clear Sky Science · de
Die Rolle der Hautmechanik bei der Variation der Kontaktkräfte unter unterschiedlichen Reibungsbedingungen
Warum die erste Berührung einer Fingerkuppe wichtig ist
Jedes Mal, wenn Sie ein nasses Glas hochheben oder über Ihr Telefon wischen, beurteilen Ihre Fingerspitzen sofort, wie rutschig die Oberfläche ist, und passen den Griff an, damit das Objekt nicht verrutscht oder zerdrückt wird. Diese Fähigkeit schreiben wir normalerweise dem Gehirn und den Nerven zu, die ein Verrutschen erkennen und den Griff schnell anziehen. Die vorliegende Studie stellt eine subtilere Frage: Bevor das Gehirn Zeit hat zu reagieren, kann die weiche, nachgiebige Mechanik der Haut selbst bereits beeinflussen, wie sicher wir Dinge halten?
Hände als eingebaute Sicherheitssysteme
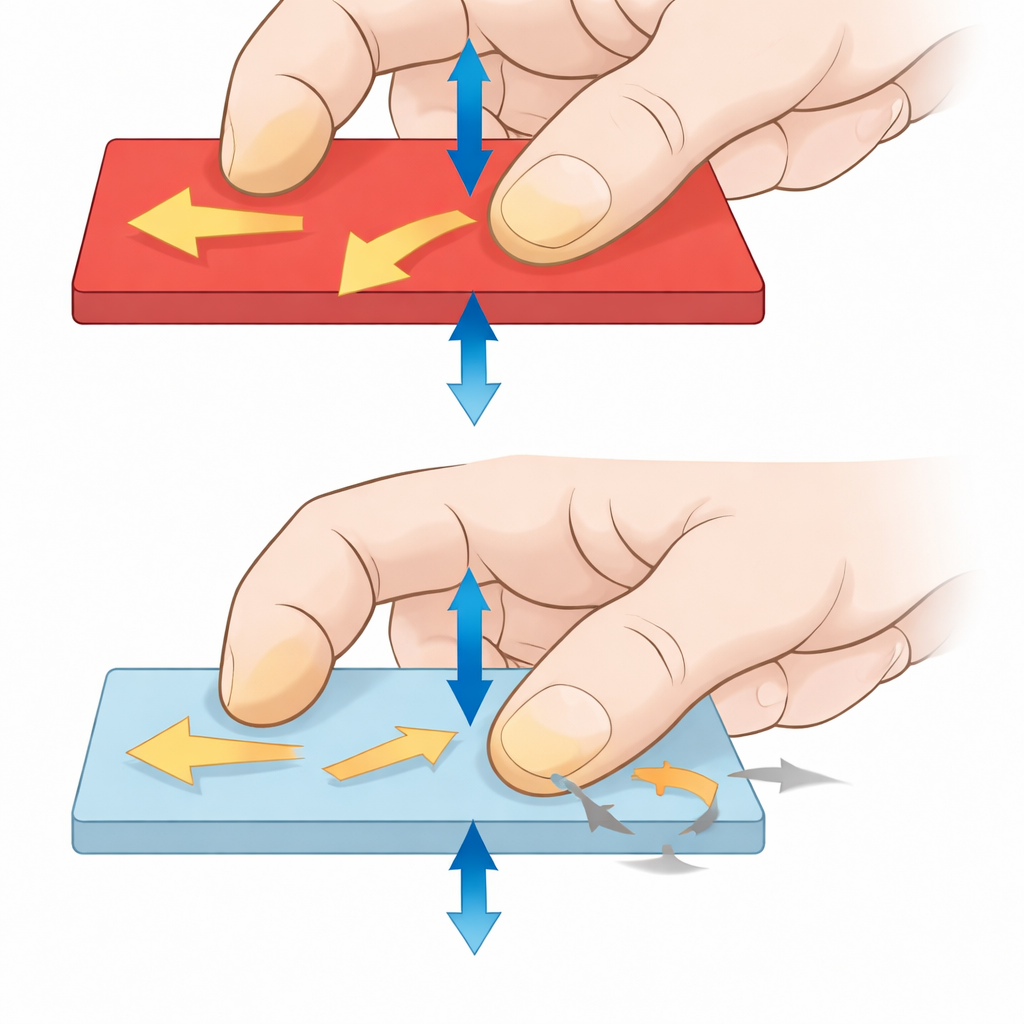
Die Forscher konzentrierten sich auf den allerersten Augenblick, in dem eine Fingerkuppe mit einem Objekt in Kontakt kommt. In diesem kurzen Zeitfenster hat das Nervensystem die Berührungssignale noch nicht verarbeitet, sodass der Griff größtenteils von der physikalischen Wechselwirkung zwischen Haut und Oberfläche bestimmt wird. Um diese frühe Phase zu isolieren, zeichneten die Autoren zunächst natürliche Greifbewegungen auf, während Probanden ein kleines Objekt mit Daumen und Zeigefinger anheben. Dieselben Bewegungsmuster spielten sie anschließend mit einem Robotergerät auf neuen Versuchspersonen ab: Eine Glasplatte wurde unter kontrollierten Bedingungen auf die Fingerkuppe gepresst und über sie geschoben, während der Finger selbst ruhig blieb. Durch Ein- und Ausschalten ultraschallbasierter Schwingungen in der Glasplatte konnten sie zwischen einer hochreibenden (griffigen) und einer niedrigreibenden (rutschigen) Oberfläche wechseln, ohne sonst etwas zu verändern.
Beobachtung von Kräften und Hautrutschen
Während dieser robotergeführten Berührungen maßen die Wissenschaftler die Kräfte an der Fingerkuppe und filmten die Haut durch das klare Glas mit einer Hochgeschwindigkeitskamera. Dadurch konnten sie winzige Bewegungen der Fingerabdruckrillen verfolgen und sehen, welche Bereiche der Haut an der Glasscheibe klebten und welche abrutschten. Sie stellten fest, dass sich die Kraft, die senkrecht in den Finger drückt (Normal- oder Druckkraft), in etwa gleich entwickelte, unabhängig davon, ob die Oberfläche griffig oder rutschig war. Dagegen wuchs die seitliche Kraft entlang der Oberfläche (Tangentialkraft), die mit der Last zusammenhängt, die ein Objekt tragen kann bevor es rutscht, langsamer und erreichte auf der rutschigen Oberfläche einen niedrigeren Spitzenwert. Infolgedessen war das Verhältnis von Normal- zu Tangentialkraft auf rutschigem Glas höher — ein Befund, der dem ähnelt, was man beobachtet, wenn Menschen aktiv ihren Griff an einem glatten Objekt anziehen.
Partielles Rutschen als versteckter Faktor
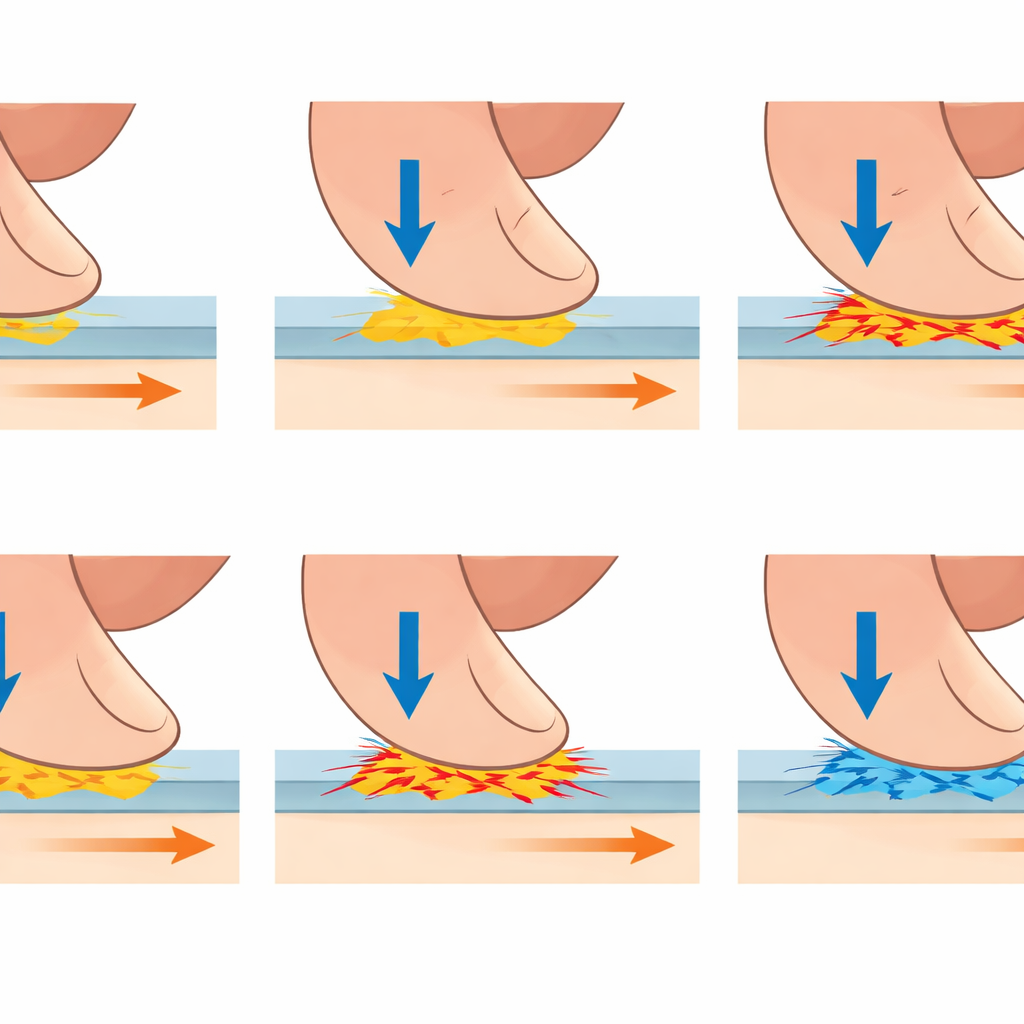
Die Videos zeigten, dass die Haut niemals wie ein starrer Block wirkt, der auf der Oberfläche klebt. Stattdessen rutschten von Beginn des Kontakts an Teile der Kontaktfläche, während andere Bereiche klebten — und dieses Muster veränderte sich im Verlauf der Berührung. Sowohl auf griffigem als auch auf rutschigem Glas verkleinerte sich die gerutschte Fläche anfangs, da zunehmender Andrückdruck mehr Haut am Glas haften ließ, und wuchs dann wieder, als seitliche Bewegung zunahm. Auf der niedrigreibenden Oberfläche rutschte jedoch ein größerer Anteil der Kontaktregion und die Gesamtdistanz, die Hautpartien zurücklegten, war größer. Diese stärkeren Rutschbewegungen standen in engem Zusammenhang mit dem schwächeren und langsameren Aufbau der Tangentialkraft: Wenn Hautpartien losließen und gleiteten, setzten sie Schubspannungen frei, wodurch die seitliche Kraft nicht so schnell ansteigen konnte.
Timing und Bewegungsform prägen den frühen Griff
Da der Roboter viele verschiedene natürliche Bewegungsmuster abspielte, konnte die Studie auch testen, wie sich das zeitliche Verhältnis von Eindrücken und Verschieben auf das Geschehen an der Haut auswirkte. Wenn die seitliche Bewegung später begann — also erst nachdem die Platte bereits weiter in den Finger gedrückt hatte — gab es mehr Kontaktfläche und stärkeres Festkleben, was das Rutschen reduzierte. Unter rutschigen Bedingungen hatte dieses Timing einen besonders starken Effekt: Kleine Änderungen darin, wann das Verschieben einsetzte, konnten deutlich beeinflussen, wie viel Haut rutschte und wie verzögert die seitliche Kraft war. Über die Bedingungen hinweg gingen größere gerutschte Flächen und längere Rutschdistanzen einher mit längeren Verzögerungen und geringeren Tangentialkraftwerten.
Was das für den Alltag bedeutet
Insgesamt zeigen die Ergebnisse, dass die weiche Mechanik der Fingerkuppen dazu beiträgt, Griffkräfte zu formen, bevor das Gehirn eingreifen kann. Auf rutschigen Oberflächen begrenzt größeres partielles Rutschen auf natürliche Weise, wie schnell seitliche Kräfte wachsen können, und verschiebt damit das Kraftverhältnis zugunsten von Eindrücken statt seitlichem Ziehen. Dieses eingebaute Verhalten kann helfen, unseren Griff in den ersten zehn- bis hundert Millisekunden des Kontakts zu stabilisieren und Zeit für langsamere, nervengesteuerte Korrekturen zu schaffen. Das Verständnis dieser hautgetriebenen Effekte könnte die Gestaltung besserer Prothesenhände, haptischer Touchscreens und robotischer Greifer leiten, die — ähnlich wie unsere Fingerspitzen — auf Physik ebenso sehr angewiesen sind wie auf Feedback, um den Halt an der Welt zu behalten.
Zitation: Devecioğlu, İ., Ruhi, R., Afzal, N. et al. The role of skin mechanics in contact force variation under different friction conditions. Sci Rep 16, 11481 (2026). https://doi.org/10.1038/s41598-026-41781-z
Schlüsselwörter: Griffkontrolle, Reibung der Fingerkuppe, Hautmechanik, taktiles Empfinden, Objektmanipulation