Clear Sky Science · ar
دور ميكانيكا الجلد في تباين قوة التلامس تحت ظروف احتكاك مختلفة
لماذا تهم لمسة طرف الإصبع الأولى
في كل مرة تلتقط فيها كأسًا مبللًا أو تمرّر شاشة هاتفك، تقيم أطراف أصابعك فورًا مدى انزلاقية السطح وتضبط قبضتك حتى لا ينزلق الشيء أو يتكسر. غالبًا ما ننسب هذه المهارة إلى الدماغ والأعصاب التي تلمس الانزلاق وتشدد القبضة بسرعة. تطرح هذه الدراسة سؤالًا أدقّ: قبل أن يمتلك الدماغ الوقت للرد، هل يمكن لميكانيكا الجلد الناعمة والمرنة أن تشكّل بالفعل مدى أمان إمساكنا للأشياء؟
الأيدي كنظم أمان مدمجة
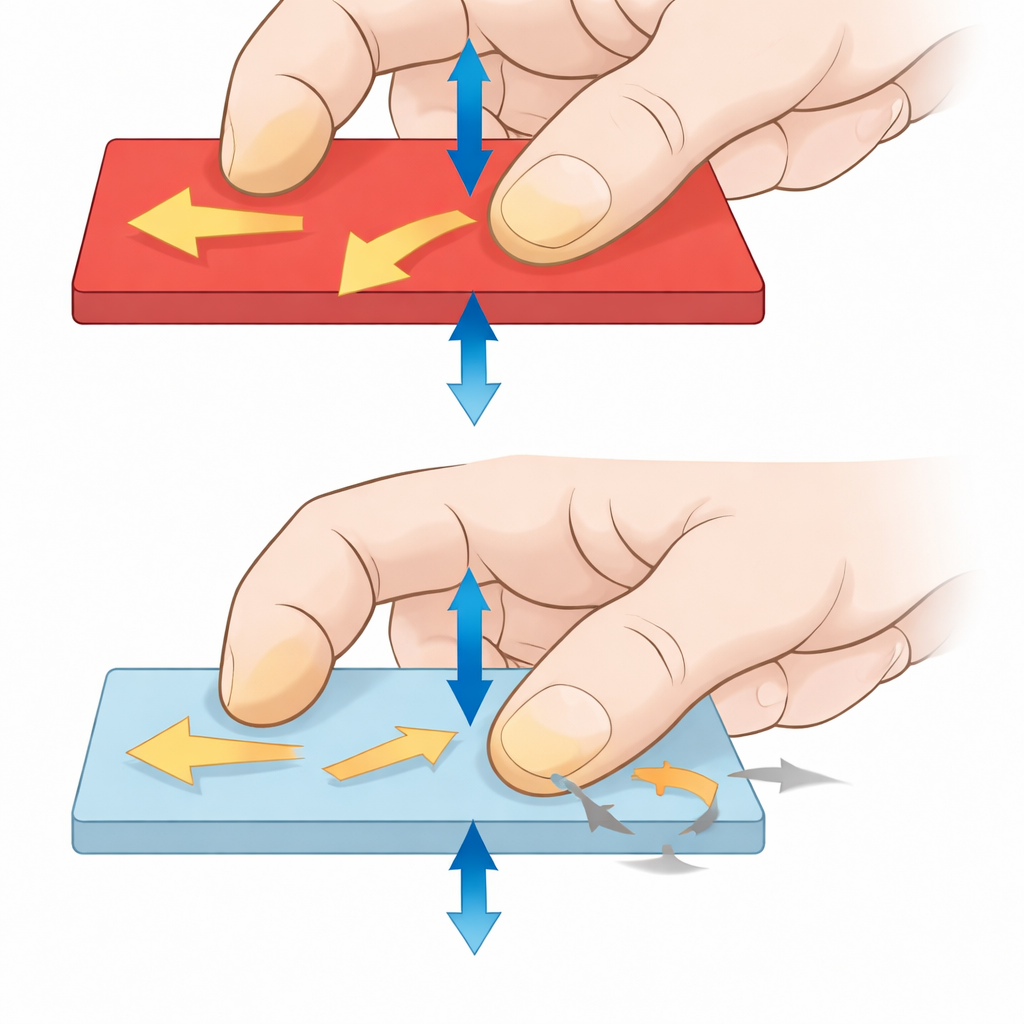
ركز الباحثون على اللحظة الفاصلة الأولى عندما يلامس طرف الإصبع جسمًا. في هذه النافذة القصيرة، لم تتم معالجة إشارات اللمس بعد من قبل الجهاز العصبي، لذا تُوجَّه القبضة في الغالب بالتفاعل الفيزيائي بين الجلد والسطح. لعزل هذه المرحلة المبكرة، سجّل الفريق أولًا حركات الالتقاط والوصول الطبيعية عندما رفع الأشخاص جسمًا صغيرًا بالإبهام والسبابة. ثم أعادوا تشغيل أنماط الحركة نفسها على أطراف أصابع متطوعين جدد باستخدام جهاز روبوتي ضغط وحرك لوح زجاجي عبر وسادة الإصبع في ظروف مُتحكَّم بها، بينما بقي الإصبع ثابتًا. من خلال تشغيل الاهتزازات فوق الصوتية في الزجاج وإيقافها، يمكنهم التبديل بين سطح عالي الاحتكاك (لاصق) وسطح منخفض الاحتكاك (زلق) دون تغيير أي شيء آخر.
مراقبة القوى وانزلاق الجلد
خلال هذه اللمسات المدفوعة روبوتيًا، قاس العلماء القوى عند طرف الإصبع وصوّروا الجلد من خلال الزجاج الشفاف بكاميرا عالية السرعة. أتاح لهم ذلك تتبّع حركات صغيرة لخطوط بصمة الإصبع ورؤية أي مناطق الجلد التزمت بالزجاج وأيها انزلقت. وجدوا أن القوة الضاغطة المتعامدة مع الإصبع (القوة العمودية) تطورت بنفس الطريقة تقريبًا سواء كان السطح لاصقًا أو زلقًا. على النقيض من ذلك، كانت القوة الجانبية على طول السطح (القوة المماسية)، المرتبطة بالحمولة التي يمكن للمَقبوضة حملها قبل الانزلاق، تتزايد ببطء وتبلغ ذروة أقل على السطح الزلق. نتيجة لذلك، كان نسبة القوة العمودية إلى المماسية أعلى على الزجاج الزلق، مما يعكس ما يُرى عندما يشد الناس قبضتهم بنشاط على جسم أملس.
الانزلاق الجزئي كلاعب خفي
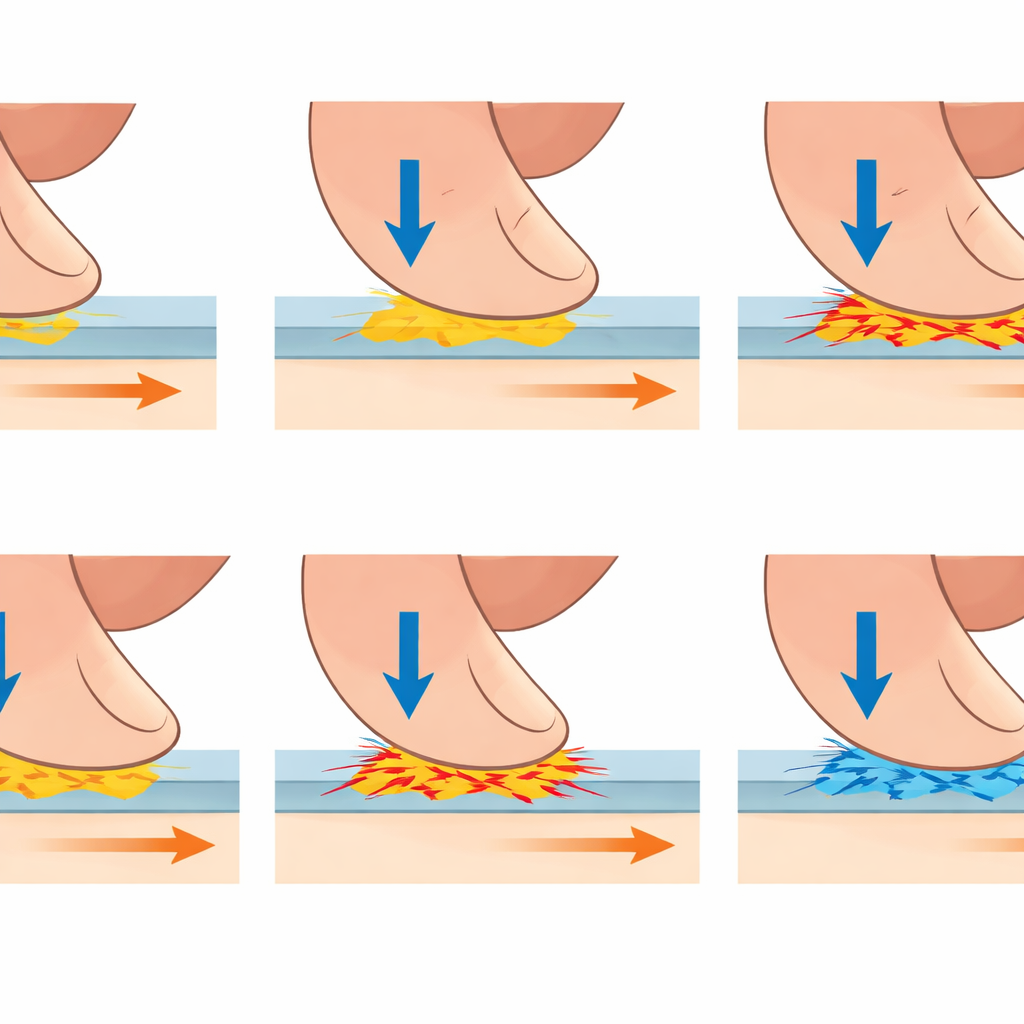
كشفت الفيديوهات أن الجلد لا يتصرف أبدًا ككتلة صلبة ملتصقة بالسطح. بدلاً من ذلك، منذ لحظة التلامس، تنزلق أجزاء من منطقة التماس بينما تلتصق أجزاء أخرى، ويتغير هذا النمط مع تطور اللمسة. على كل من الزجاج اللاصق والزجاج الزلق، تقلصت منطقة الانزلاق في البداية مع زيادة قوة الدفع للأسفل لأن مزيدًا من الجلد بدأ يلتصق، ثم نمت مجددًا لاحقًا مع تراكم الحركة الجانبية. ومع ذلك، على السطح منخفض الاحتكاك، انزلقت نسبة أكبر من منطقة التلامس وكانت المسافة الكلية التي تحركت بها رقع الجلد أكبر. وكانت هذه الانزلاقات الأكبر مرتبطة ارتباطًا وثيقًا بالتراكم الأضعف والأبطأ للقوة المماسية: عندما تتخلّص رقع الجلد من الالتصاق وتنساب، تُفرج عن إجهاد القص، مما يمنع القوة المماسية من الارتفاع بنفس السرعة.
التوقيت وشكل الحركة يشكلان القبضة المبكرة
بما أن الروبوت أعاد تشغيل أنماط حركة طبيعية متعددة، تمكنت الدراسة أيضًا من اختبار كيف أثر التزامن النسبي للدفع الدخول والحركة الجانبية على ما يحدث في الجلد. عندما بدأت الحركة الجانبية في وقت لاحق — بعد أن ضغط اللوح بالفعل أكثر داخل الإصبع — كانت هناك مساحة تلامس أكبر والتصاق أقوى، مما قلل الانزلاق. تحت ظروف انزلاقية، كان لهذا التوقيت تأثير قوي بشكل خاص: تغييرات صغيرة في توقيت بدء الانزلاق يمكن أن تغير بشكل ملحوظ مقدار الجلد الذي انزلق ومدى تأخر القوة الجانبية. عبر الشروط، ارتبطت مساحة الانزلاق الأكبر والمسافات الأطول للانزلاق بتأخيرات أطول وقيم أصغر للقوة المماسية.
ماذا يعني هذا للقبضة اليومية
تُظهر النتائج مجتمعة أن ميكانيكا وسائد الأصابع اللينة تساعد في تشكيل قوى القبضة قبل أن تتاح فرصة للدماغ للتدخل. على الأسطح الزلقة، يقيّد الانزلاق الجزئي الأكبر بطبيعة الحال مدى سرعة زيادة القوى الجانبية، مزيحًا توازن القوى باتجاه الدفع إلى الداخل بدلاً من السحب على طول السطح. قد يساعد هذا السلوك المدمج في تثبيت قبضتنا في العشرات الأولى من الملِّي ثانية من التلامس، وهو ما يمنح وقتًا للتصحيحات الأبطأ المدفوعة بالأعصاب لتدخل حيز التنفيذ. قد يوجّه فهم هذه التأثيرات المدفوعة بالجلد تصميم أيدي اصطناعية أفضل، وشاشات لمسية حسّية، وملاقط روبوتية تعتمد، مثل أطراف أصابعنا، على الفيزياء بقدر اعتمادها على الملاحظات للحفاظ على الإمساك بالعالم.
الاستشهاد: Devecioğlu, İ., Ruhi, R., Afzal, N. et al. The role of skin mechanics in contact force variation under different friction conditions. Sci Rep 16, 11481 (2026). https://doi.org/10.1038/s41598-026-41781-z
الكلمات المفتاحية: التحكم في القبضة, احتكاك وسادة الإصبع, ميكانيكا الجلد, الإحساس اللمسي, التعامل مع الأشياء