Clear Sky Science · ja
異なる摩擦条件下での接触力変動における皮膚力学の役割
指先の“最初の触れ”が重要な理由
濡れたグラスを持ち上げたりスマートフォンをスワイプしたりするたびに、指先は表面の滑りやすさを瞬時に判断し、物体が滑ったり潰れたりしないように把持を調整します。通常、この能力はズレを感知してすばやく把持力を強める脳や神経のおかげだと考えられます。本研究はより微妙な問いを立てます:脳が反応する前の段階で、軟らかく変形する皮膚そのものの力学が既にどれだけ安全な把持の成り立ちに影響を与えているのか、ということです。
手は組み込みの安全装置のように働く
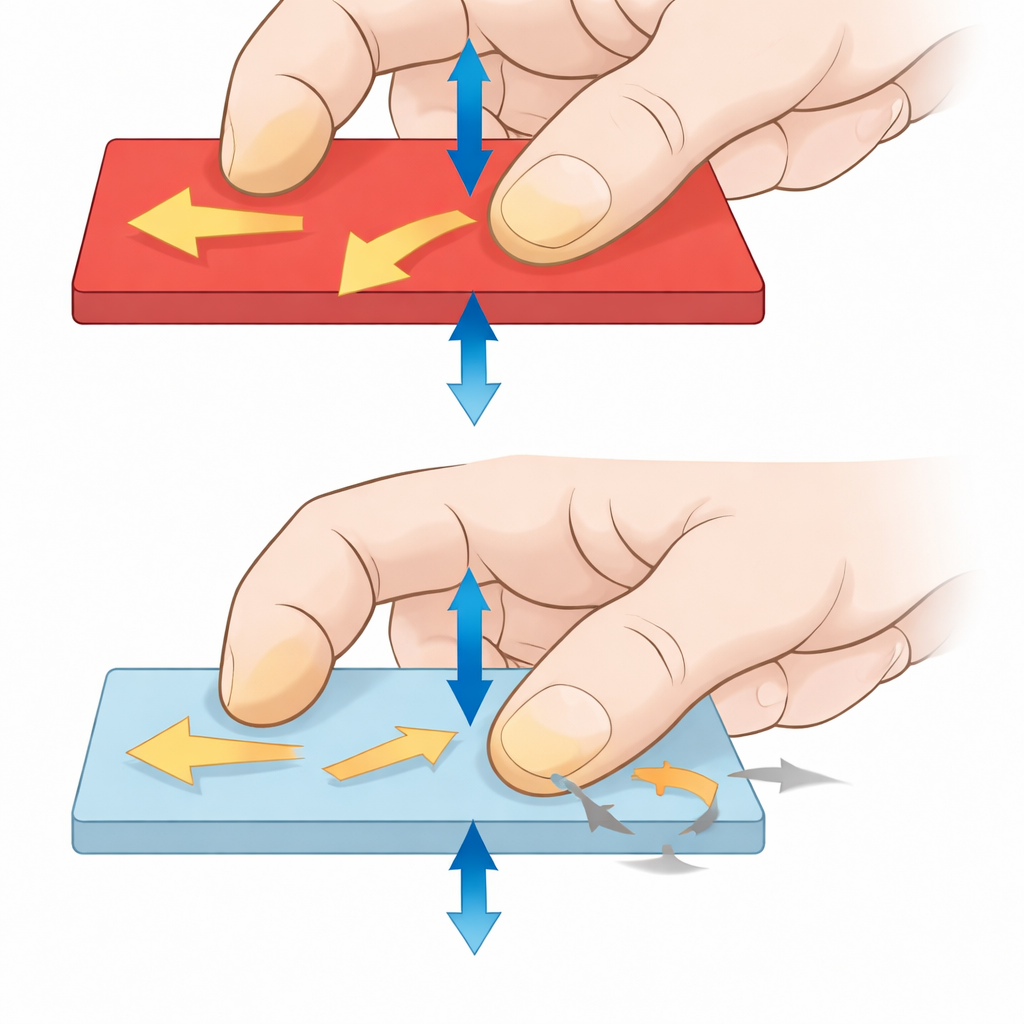
研究者たちは、指先が物体に接触する最初のほんの一瞬に注目しました。この短い時間帯では、神経系はまだ触覚信号を処理していないため、把持は主に皮膚と表面の物理的相互作用に左右されます。初期段階を分離するため、チームはまず被験者が親指と人差し指で小さな物体を持ち上げる自然な到達—把持動作を記録しました。その後、その同じ動作パターンをロボット装置で再生し、実験参加者の指を動かさずにガラス板を指パッド上に押し当てて滑らせることで、制御下の条件で触接を再現しました。ガラスに超音波振動をオン/オフすることで、他の条件を変えずに高摩擦(グリップする)表面と低摩擦(滑りやすい)表面を切り替えられるようにしました。
力と皮膚の滑りを観察する
これらのロボットによる接触中、科学者たちは指先での力を計測し、透明なガラス越しに高速カメラで皮膚を撮影しました。これにより、指紋の畝のごく小さな動きを追跡し、どの領域がガラスに付着しているか、どの領域が滑っているかを可視化できました。押し込む方向の力(法線力)は、表面がグリップする場合と滑りやすい場合でほぼ同じように発達しました。一方で、表面に沿った横方向の力(接線力)は、滑りやすい表面ではよりゆっくりと増加し、ピークも低くなりました。その結果、滑りやすいガラスでは法線力と接線力の比が高くなり、これは人が滑りやすい物体に対して能動的に把持力を強めるときに見られる傾向を反映しています。
部分滑りが隠れた主役
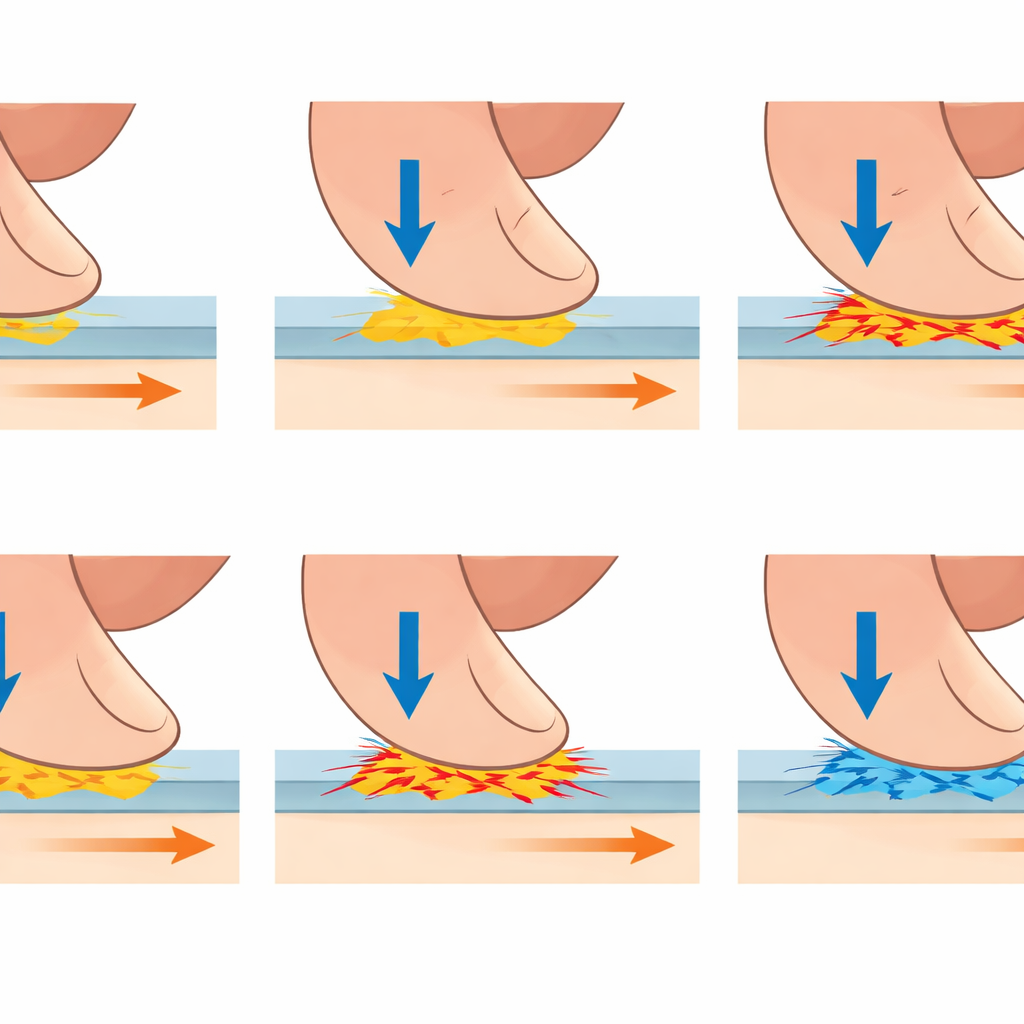
映像は、皮膚が表面に接着した剛体の塊のように振る舞うことは決してないことを示しました。むしろ接触の最初から、接触領域の一部は滑り、他の部分は付着しており、そのパターンは接触の進行とともに変化します。グリップするガラスと滑りやすいガラスの両方で、滑った領域は当初は押し込み力の増加によって付着領域が拡大し縮小しましたが、その後横方向の動きが蓄積するにつれて再び増大しました。しかし低摩擦面では、接触領域のより大きな部分が滑り、皮膚パッチが移動した総距離も大きくなりました。これらの大きな滑りは、接線力の立ち上がりが弱く遅いことと密接に結びついていました:皮膚パッチが離れて滑るときにせん断応力が解放されるため、接線力が速く上昇するのを妨げるのです。
タイミングと運動が初期の把持を形作る
ロボットがさまざまな自然な運動パターンを再生したため、押し込みとすべりの相対的なタイミングが皮膚で何を引き起こすかも検証できました。横方向の動きが遅れて始まった—つまり板が指により深く押し込まれた後で滑りが始まった—場合、接触面積は大きく付着は強まり、その結果滑りは減少しました。滑りやすい条件では、このタイミングが特に強い影響を与えました:滑りの開始時刻がわずかに変わるだけで、どれだけの皮膚が滑るかや接線力の遅れ方が目に見えて変わり得ました。全体として、より大きな滑った面積や長い滑動距離は、接線力の遅れが長く小さい値と結びついていました。
日常の把持にとっての意味
総合すると、指先の軟らかい力学が脳が介入する前の段階で把持力の成り立ちを助けていることが示されます。滑りやすい表面では、より大きな部分的滑りが自然に横方向の力の急速な増加を抑え、力のバランスを横方向よりも押し込み側に偏らせます。この組み込みの振る舞いは、接触後数十ミリ秒の間に把持を安定させ、より遅い神経駆動の補正が間に合うよう時間を稼ぐ助けになる可能性があります。こうした皮膚主導の効果を理解することは、より優れた義手、触覚インターフェースを備えたタッチスクリーン、あるいは我々の指先と同様にフィードバックだけでなく物理学を利用して物体を確保するロボットグリッパーの設計に役立つでしょう。
引用: Devecioğlu, İ., Ruhi, R., Afzal, N. et al. The role of skin mechanics in contact force variation under different friction conditions. Sci Rep 16, 11481 (2026). https://doi.org/10.1038/s41598-026-41781-z
キーワード: 把持制御, 指頭摩擦, 皮膚力学, 触覚センシング, 物体操作