Clear Sky Science · nl
De rol van huidmechanica bij variatie in contactkrachten onder verschillende wrijvingscondities
Waarom de eerste aanraking van een vingertop ertoe doet
Elke keer dat u een nat glas optilt of over uw telefoon veegt, beoordelen uw vingertoppen onmiddellijk hoe glibberig het oppervlak is en passen ze uw greep aan zodat het object niet wegglijdt of wordt samengeperst. Meestal schrijven we deze vaardigheid toe aan de hersenen en de zenuwen die slip waarnemen en snel de greep aanspannen. Deze studie stelt een subtielere vraag: kan de zachte, kneedbare mechanica van de huid zelf al bepalen hoe veilig we iets vasthouden voordat de hersenen de tijd hebben om te reageren?
Handen als ingebouwde beveiligingssystemen
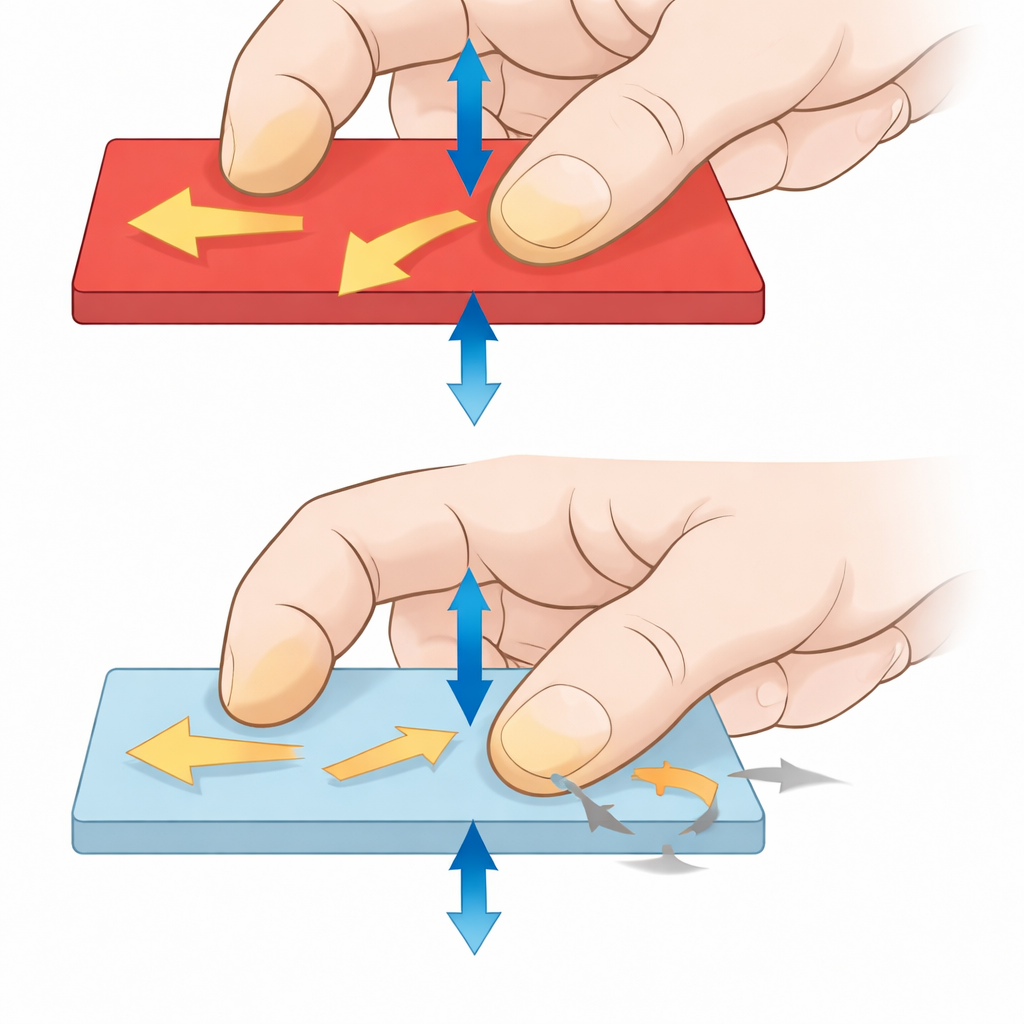
De onderzoekers richtten zich op het allereerste splinternieuwe ogenblik waarop een vingertop contact maakt met een object. In dit korte venster heeft het zenuwstelsel de aanraking nog niet verwerkt, dus wordt de greep grotendeels gestuurd door de fysieke interactie tussen huid en oppervlak. Om deze vroege fase te isoleren, namen het team eerst natuurlijke reiken-grijpen-bewegingen op terwijl mensen een klein voorwerp optilden met duim en wijsvinger. Vervolgens speelden ze diezelfde bewegingspatronen af op de vingertoppen van nieuwe proefpersonen met behulp van een robotisch apparaat dat een glazen plaat onder gecontroleerde omstandigheden tegen het vingertopje drukte en erover schoof, terwijl de vinger zelf stil bleef. Door ultrasone vibraties in het glas aan en uit te zetten, konden ze wisselen tussen een hoog-wrijvend (griprijk) en een laag-wrijvend (glad) oppervlak zonder iets anders te veranderen.
Kijken naar krachten en huidslip
Tijdens deze robotgestuurde aanrakingen maten de wetenschappers de krachten bij de vingertop en filmden ze de huid door het heldere glas met een hogesnelheidscamera. Dit stelde hen in staat om piepkleine bewegingen van de vingerafdrukribbels te volgen en te zien welke delen van de huid aan het glas vastpakten en welke delen weggleden. Ze ontdekten dat de kracht die loodrecht op de vinger inwerkt (normaalkracht) zich ongeveer op dezelfde manier ontwikkelde, ongeacht of het oppervlak grippy of glad was. Daarentegen groeide de zijwaartse kracht langs het oppervlak (tangentiekracht), die verband houdt met de belasting die een object kan dragen voordat het wegglijdt, langzamer en bereikte een lagere piek op het gladde oppervlak. Daardoor was de verhouding tussen normaalkracht en tangentiekracht hoger op het glibberige glas, wat echoot wat wordt gezien wanneer mensen actief hun greep aanspannen op een glad voorwerp.
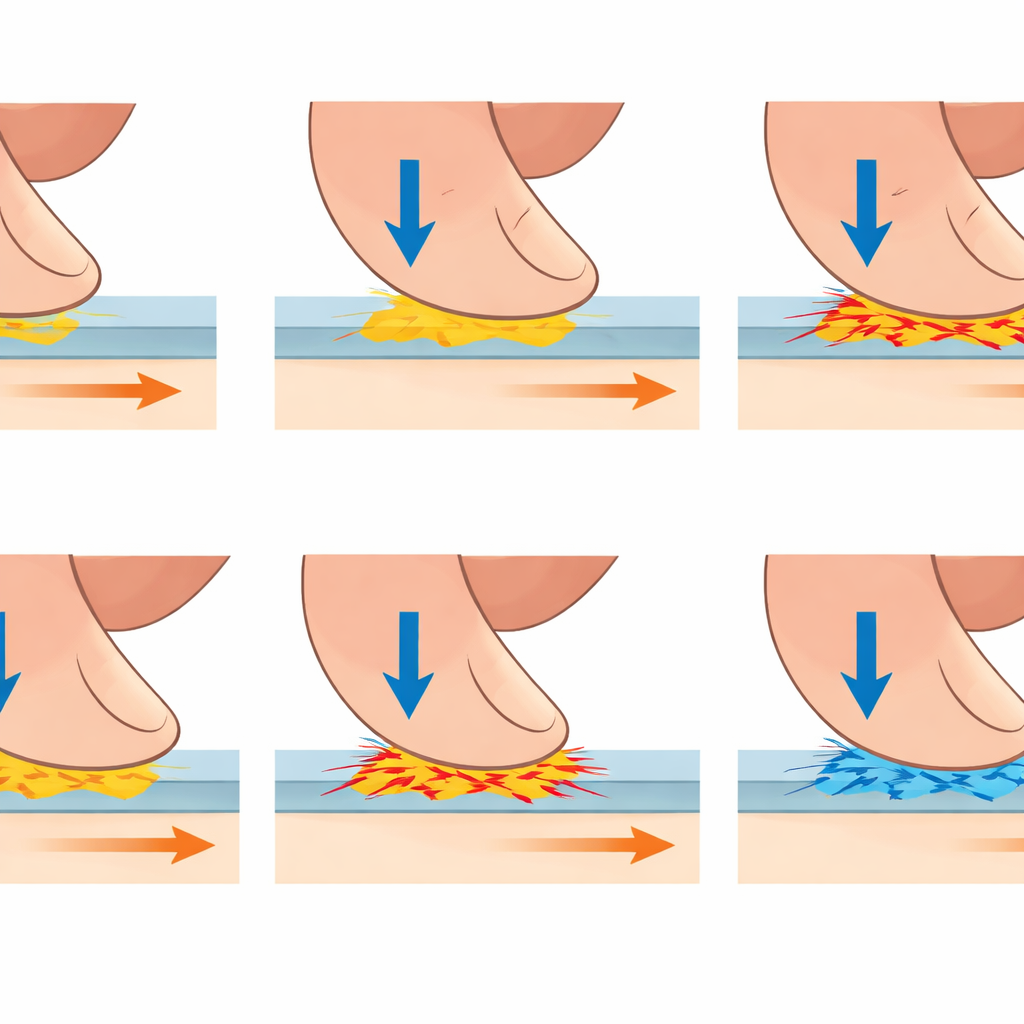
Deelgewijs slippen als een verborgen factor
De video’s toonden aan dat de huid nooit gedraagt als een stijf blok dat aan het oppervlak vastgelijmd is. In plaats daarvan slipten vanaf het allereerste begin van het contact delen van het contactgebied terwijl andere delen bleven plakken, en dit patroon veranderde terwijl de aanraking zich ontvouwde. Zowel op grippy als op glad glas kromp het wegglijden aanvankelijk doordat de toenemende indrukkracht meer huid deed hechten, en groeide later weer naarmate de zijwaartse beweging toenam. Echter, op het laag-wrijvende oppervlak slipte een groter deel van het contactgebied en legden de huidpatches een grotere totale afstand af. Deze grotere slips waren sterk verbonden met de zwakkere en langzamer opgebouwde zijwaartse kracht: zodra huidpatches loslieten en begonnen te schuiven, lieten ze schuifspanning vrij, wat verhinderde dat de tangentiekracht zo snel toenam.
Timing en beweging vormen vroege greep
Aangezien de robot vele verschillende natuurlijke bewegingspatronen afspeelde, kon de studie ook onderzoeken hoe de relatieve timing van indrinken en schuiven beïnvloedde wat er met de huid gebeurde. Wanneer de zijwaartse beweging later begon—nadat de plaat al dieper in de vinger had gedrukt—was er meer contactoppervlak en sterker vasthechten, wat slip verminderde. Onder gladde condities had deze timing een bijzonder sterk effect: kleine veranderingen in het moment waarop het schuiven begon, konden merkbaar veranderen hoeveel van de huid slipte en hoe vertraagd de zijwaartse kracht was. Over de condities heen gingen meer weggliderend gebied en grotere slipafstanden hand in hand met langere vertragingen en kleinere waarden van de tangentiekracht.
Wat dit betekent voor alledaagse grip
Gezamenlijk tonen de bevindingen aan dat de zachte mechanica van vingertoppen helpt de greepkrachten te vormen voordat de hersenen de kans hebben om in te grijpen. Op gladde oppervlakken beperkt groter partieel slip op natuurlijke wijze hoe snel zijwaartse krachten kunnen groeien, waardoor het krachtenevenwicht effectief naar indrukken in plaats van zijwaarts trekken schuift. Dit ingebouwde gedrag kan helpen onze greep te stabiliseren in de eerste tientallen milliseconden van contact, waardoor tijd wordt gewonnen voor tragere, zenuwgestuurde correcties. Inzicht in deze door de huid aangedreven effecten kan het ontwerp van betere prothetische handen, haptische touchscreens en robotische grijpers sturen die, net als onze eigen vingertoppen, evenzeer op de fysica als op terugkoppeling vertrouwen om een voorwerp vast te houden.
Bronvermelding: Devecioğlu, İ., Ruhi, R., Afzal, N. et al. The role of skin mechanics in contact force variation under different friction conditions. Sci Rep 16, 11481 (2026). https://doi.org/10.1038/s41598-026-41781-z
Trefwoorden: greepcontrole, vingerpadriek, huidmechanica, tactiele waarneming, objectmanipulatie