Clear Sky Science · en
The role of skin mechanics in contact force variation under different friction conditions
Why a fingertip’s first touch matters
Every time you pick up a wet glass or swipe your phone, your fingertips instantly judge how slippery the surface is and adjust your grip so the object does not slip or get crushed. We usually credit this skill to the brain and nerves that sense slip and quickly tighten our grip. This study asks a subtler question: before the brain has time to react, can the soft, squishy mechanics of the skin itself already shape how safely we hold things?
Hands as built-in safety systems
The researchers focused on the very first split second when a fingertip makes contact with an object. In this brief window, the nervous system has not yet processed touch signals, so grip is guided mostly by the physical interaction between skin and surface. To isolate this early phase, the team first recorded natural reach-and-grasp movements as people lifted a small object with thumb and index finger. They then replayed those same motion patterns onto the fingertips of new volunteers using a robotic device that pressed and slid a glass plate across the finger pad under controlled conditions, while the finger itself stayed still. By turning ultrasonic vibrations on and off in the glass, they could switch between a high-friction (grippy) surface and a low-friction (slippery) one without changing anything else.
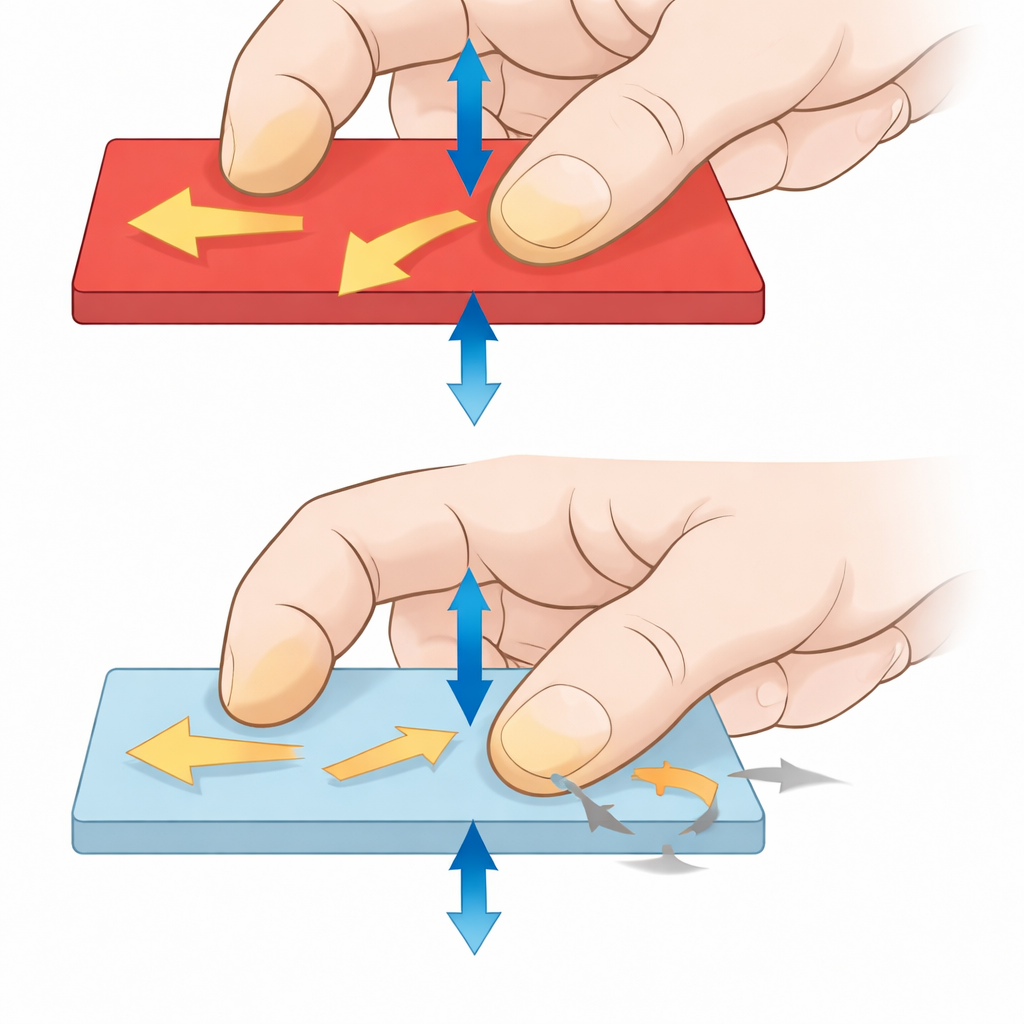
Watching forces and skin slip
During these robot-driven touches, the scientists measured forces at the fingertip and filmed the skin through the clear glass with a high-speed camera. This allowed them to track tiny movements of fingerprint ridges and see which areas of skin stuck to the glass and which areas slipped. They found that the force pushing straight into the finger (normal force) developed in much the same way whether the surface was grippy or slippery. In contrast, the sideways force along the surface (tangential force), which is related to the load an object can support before slipping, grew more slowly and reached a lower peak on the slippery surface. As a result, the ratio of normal to tangential force was higher on slippery glass, echoing what is seen when people actively tighten their grip on a slick object.
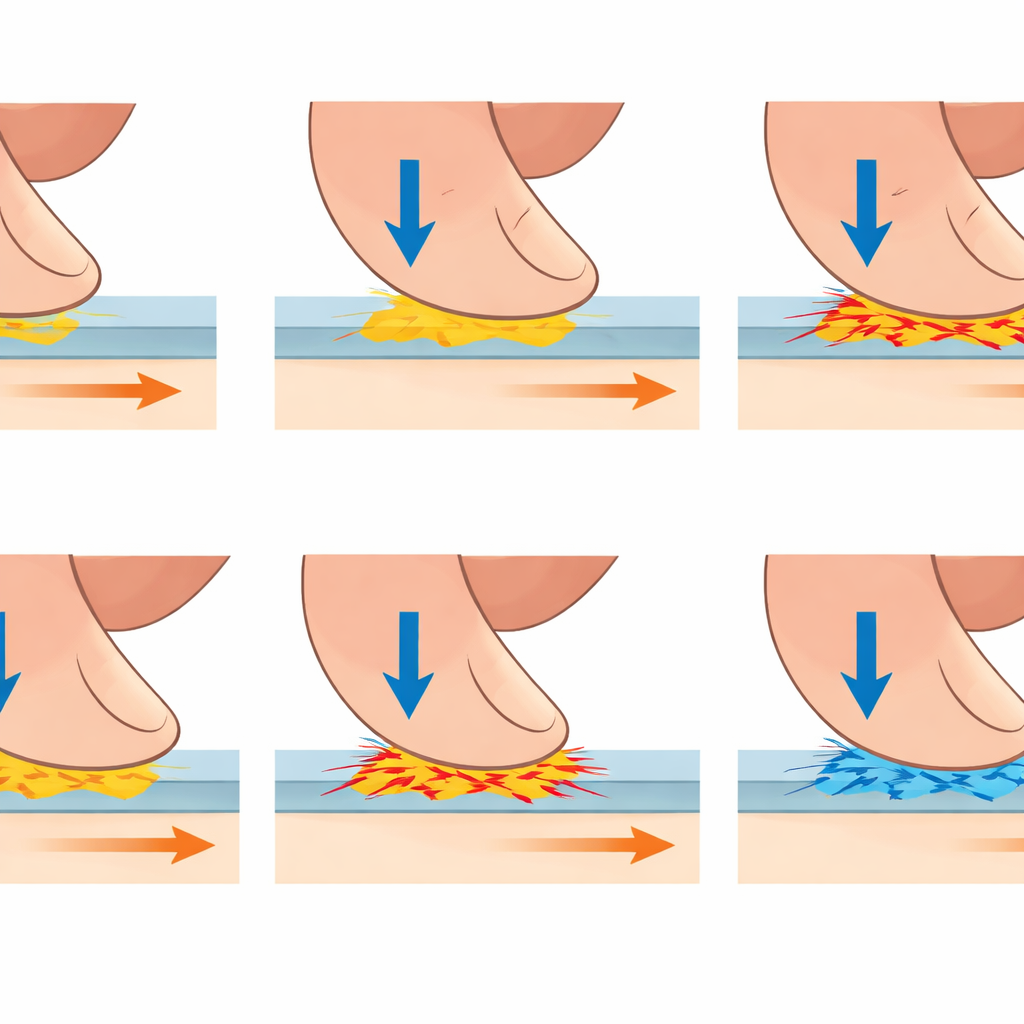
Partial slip as a hidden player
The videos revealed that the skin never behaves like a rigid block glued to the surface. Instead, from the very start of contact, parts of the contact area slip while other parts stick, and this pattern changes as the touch unfolds. On both grippy and slippery glass, the slipped area initially shrank as increasing push-in force caused more skin to adhere, then later grew again as sideways motion built up. However, on the low-friction surface, a larger portion of the contact region slipped and the total distance that the skin patches traveled was greater. These larger slips were closely linked to the weaker and slower buildup of sideways force: as skin patches let go and slide, they release shear stress, preventing tangential force from rising as quickly.
Timing and motion shape early grip
Because the robot replayed many different natural motion patterns, the study could also test how the relative timing of pushing in and sliding affected what happened at the skin. When sideways motion began later—after the plate had already pressed further into the finger—there was more contact area and stronger sticking, which reduced slip. Under slippery conditions, this timing had an especially strong impact: small changes in when sliding started could noticeably change how much of the skin slipped and how delayed the sideways force was. Across conditions, greater slipped area and longer slip distances went hand-in-hand with longer delays and smaller values of tangential force.
What this means for everyday grip
Taken together, the findings show that the soft mechanics of finger pads help shape grip forces before the brain has a chance to intervene. On slippery surfaces, greater partial slip naturally limits how quickly sideways forces can grow, effectively biasing the force balance toward pushing in rather than dragging along. This built-in behavior may help stabilize our grip in the first tens of milliseconds of contact, buying time for slower, nerve-driven corrections to kick in. Understanding these skin-driven effects could guide the design of better prosthetic hands, haptic touchscreens, and robotic grippers that, like our own fingertips, rely on physics as much as on feedback to keep a hold on the world.
Citation: Devecioğlu, İ., Ruhi, R., Afzal, N. et al. The role of skin mechanics in contact force variation under different friction conditions. Sci Rep 16, 11481 (2026). https://doi.org/10.1038/s41598-026-41781-z
Keywords: grip control, fingerpad friction, skin mechanics, tactile sensing, object manipulation