Clear Sky Science · it
Il ruolo della meccanica della pelle nella variazione delle forze di contatto in diverse condizioni di attrito
Perché il primo contatto della punta del dito è importante
Ogni volta che sollevi un bicchiere bagnato o scorri il dito sul telefono, la punta delle dita valuta istantaneamente quanto sia scivolosa la superficie e adatta la presa perché l’oggetto non scivoli né venga schiacciato. Normalmente attribuiamo questa abilità al cervello e ai nervi che percepiscono lo scivolamento e stringono rapidamente la presa. Questo studio pone una domanda più sottile: prima che il cervello abbia il tempo di reagire, la meccanica morbida e deformabile della pelle può già influenzare il modo in cui teniamo gli oggetti?
Le mani come sistemi di sicurezza integrati
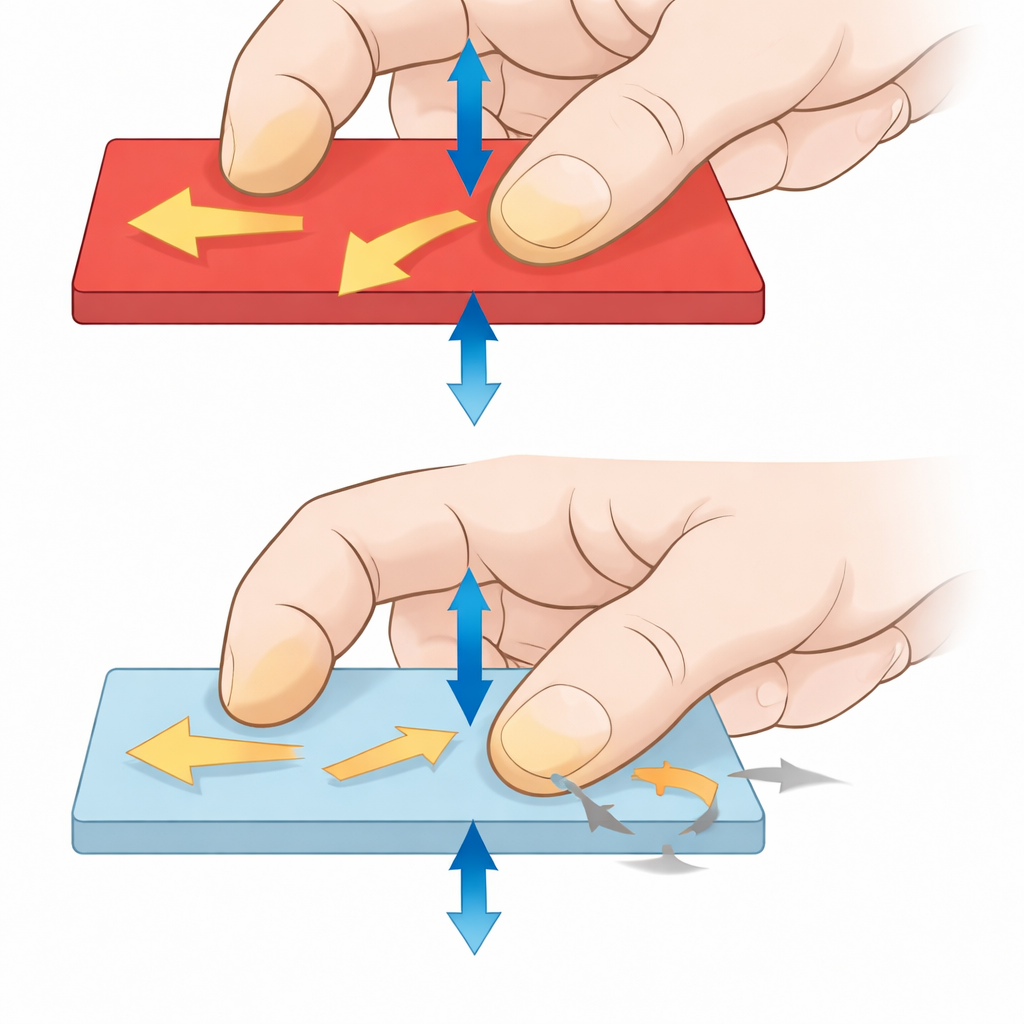
I ricercatori si sono concentrati sul primissimo istante in cui una punta di dito entra in contatto con un oggetto. In questa breve finestra temporale il sistema nervoso non ha ancora elaborato i segnali tattili, quindi la presa è guidata soprattutto dall’interazione fisica tra pelle e superficie. Per isolare questa fase iniziale, il team ha prima registrato i movimenti naturali di raggiungimento e presa mentre le persone sollevavano un piccolo oggetto con pollice e indice. Poi ha riprodotto quegli stessi pattern di movimento sulle punte dei dita di nuovi volontari usando un dispositivo robotico che premeva e faceva scorrere una lastra di vetro sul cuscinetto digitale in condizioni controllate, mentre il dito restava fermo. Attivando o disattivando vibrazioni ultrasoniche nel vetro, potevano passare da una superficie ad alto attrito (più “grippante”) a una a basso attrito (più scivolosa) senza cambiare altro.
Osservare le forze e lo scorrimento della pelle
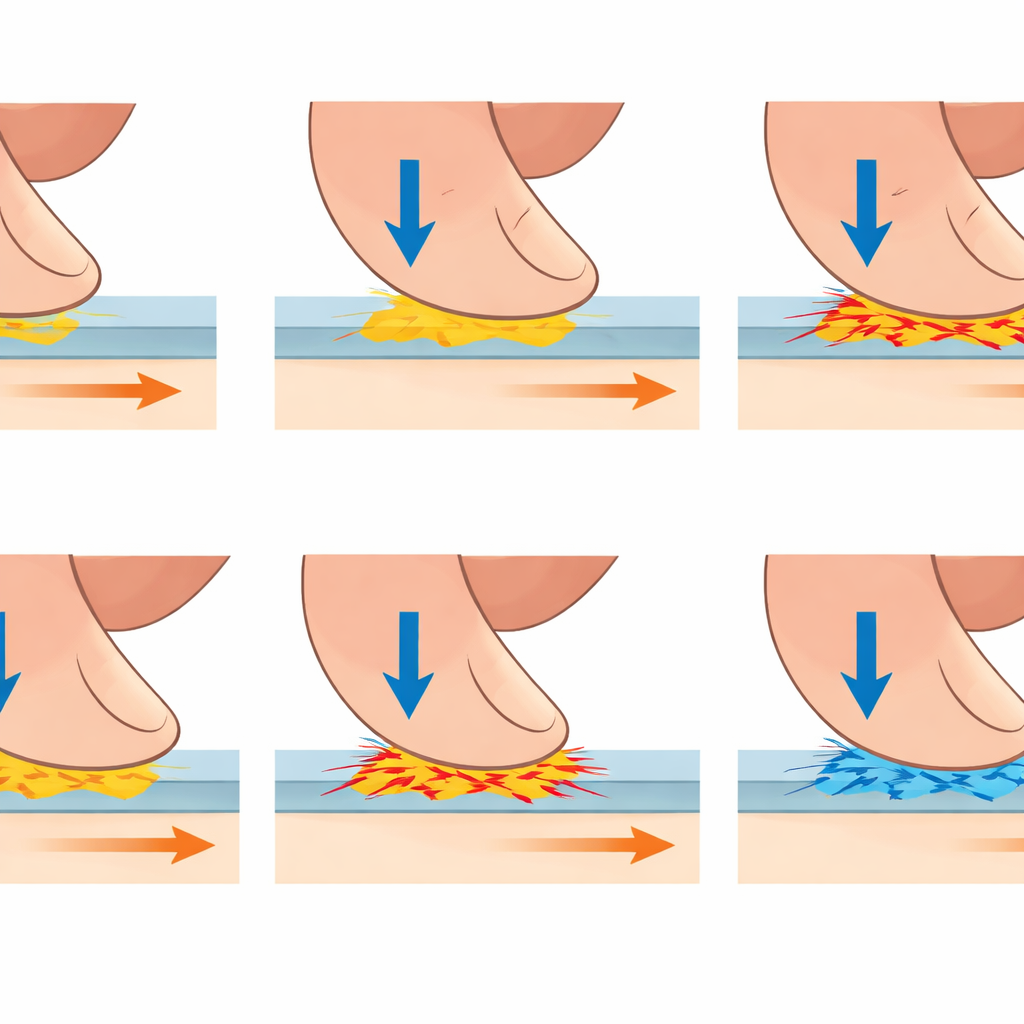
Durante questi contatti guidati dal robot, gli scienziati hanno misurato le forze sulla punta del dito e hanno filmato la pelle attraverso il vetro trasparente con una camera ad alta velocità. Ciò ha permesso di tracciare minuscoli spostamenti delle creste del polpastrello e di vedere quali aree di pelle aderivano al vetro e quali scivolavano. Hanno osservato che la forza che preme perpendicolarmente sul dito (forza normale) si sviluppava in modo molto simile sia sulla superficie grippante sia su quella scivolosa. Al contrario, la forza laterale lungo la superficie (forza tangenziale), che è legata al carico che un oggetto può sopportare prima di scivolare, cresceva più lentamente e raggiungeva un picco inferiore sulla superficie scivolosa. Di conseguenza, il rapporto tra forza normale e tangenziale era più alto sul vetro scivoloso, rispecchiando ciò che si osserva quando le persone stringono attivamente la presa su un oggetto scivoloso.
Lo scorrimento parziale come fattore nascosto
I video hanno mostrato che la pelle non si comporta mai come un blocco rigido incollato alla superficie. Piuttosto, fin dall’inizio del contatto, parti dell’area di contatto scivolano mentre altre parti restano attaccate, e questo schema cambia man mano che il contatto si sviluppa. Sia sul vetro grippante sia su quello scivoloso, l’area scorsa inizialmente diminuiva perché l’aumentare della forza di pressione causava una maggiore aderenza della pelle, per poi aumentare nuovamente con l’accumularsi del movimento laterale. Tuttavia, sulla superficie a basso attrito, una porzione più ampia della regione di contatto scivolava e la distanza totale percorsa dai frammenti di pelle era maggiore. Questi scorrimenti più ampi erano strettamente collegati alla più debole e più lenta crescita della forza tangenziale: quando i frammenti di pelle si staccano e scivolano, rilasciano stress tangenziale, impedendo alla forza laterale di aumentare rapidamente.
Tempistica e forma del movimento modellano la presa iniziale
Poiché il robot ha riprodotto molti pattern di movimento naturali diversi, lo studio ha potuto anche valutare come la tempistica relativa di spinta e scorrimento influenzasse quanto accadeva sulla pelle. Quando il movimento laterale iniziava più tardi—dopo che la lastra aveva già premuto più a fondo nel dito—c’era una maggiore area di contatto e una maggiore aderenza, il che riduceva lo scivolamento. In condizioni scivolose, questa tempistica aveva un impatto particolarmente forte: piccole variazioni nel momento di inizio dello scorrimento potevano modificare sensibilmente quanto della pelle scivolava e quanto fosse ritardata la comparsa della forza tangenziale. In tutte le condizioni, una maggiore area scivolata e distanze di scorrimento più lunghe si associavano a ritardi maggiori e a valori più bassi di forza tangenziale.
Cosa significa per la presa quotidiana
Nel complesso, i risultati mostrano che la meccanica morbida dei polpastrelli contribuisce a modellare le forze di presa prima che il cervello abbia il tempo di intervenire. Su superfici scivolose, un maggiore scorrimento parziale limita naturalmente la velocità con cui le forze laterali possono crescere, sbilanciando la relazione delle forze a favore della spinta perpendicolare invece che dello scorrimento. Questo comportamento intrinseco può aiutare a stabilizzare la nostra presa nelle prime decine di millisecondi di contatto, guadagnando tempo per le correzioni più lente guidate dai nervi. Comprendere questi effetti imputabili alla pelle potrebbe guidare la progettazione di protesi più efficaci, schermi tattili aptici e pinze robotiche che, come le nostre punte delle dita, si affidano tanto alla fisica quanto al feedback per mantenere la presa sul mondo.
Citazione: Devecioğlu, İ., Ruhi, R., Afzal, N. et al. The role of skin mechanics in contact force variation under different friction conditions. Sci Rep 16, 11481 (2026). https://doi.org/10.1038/s41598-026-41781-z
Parole chiave: controllo della presa, attrito della punta del dito, meccanica della pelle, percezione tattile, manipolazione degli oggetti