Clear Sky Science · fr
Le rôle de la mécanique de la peau dans la variation des forces de contact selon les conditions de friction
Pourquoi le premier contact d’un bout de doigt compte
Chaque fois que vous saisissez un verre mouillé ou faites glisser votre téléphone, vos bouts de doigts estiment instantanément le degré de glissance de la surface et ajustent la prise pour éviter que l’objet ne glisse ou ne soit écrasé. On attribue généralement cette habileté au cerveau et aux nerfs qui détectent le glissement et resserrent rapidement la prise. Cette étude pose une question plus subtile : avant que le cerveau ait eu le temps de réagir, la mécanique souple et déformable de la peau peut-elle déjà influencer la sécurité de notre prise ?
Les mains comme systèmes de sécurité intégrés
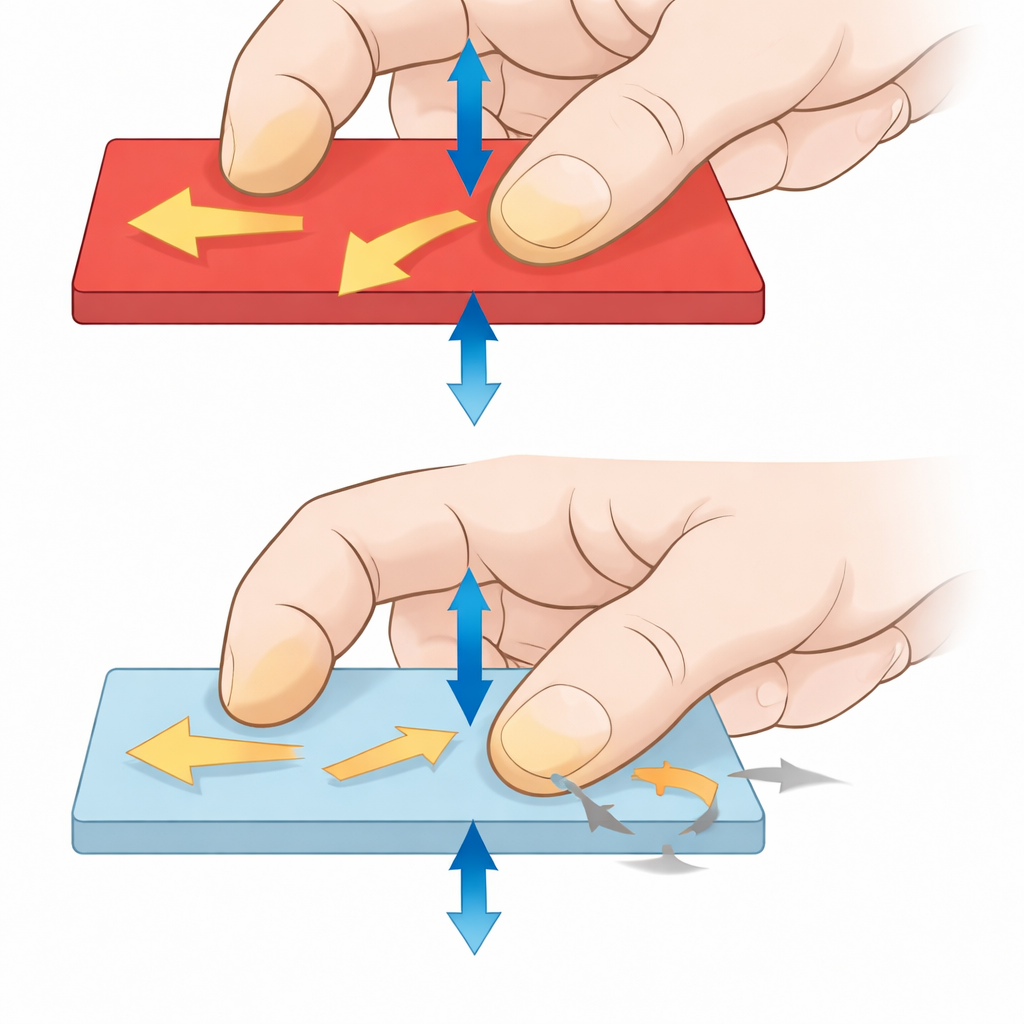
Les chercheurs se sont concentrés sur la toute première fraction de seconde où la pulpe du doigt entre en contact avec un objet. Dans cette brève fenêtre, le système nerveux n’a pas encore traité les signaux tactiles, si bien que la prise est principalement guidée par l’interaction physique entre la peau et la surface. Pour isoler cette phase précoce, l’équipe a d’abord enregistré des mouvements naturels d’atteinte et de préhension lorsque des personnes soulevaient un petit objet avec le pouce et l’index. Ils ont ensuite rejoué ces mêmes motifs de mouvement sur les bouts de doigts de nouveaux volontaires à l’aide d’un dispositif robotisé qui pressait et faisait glisser une plaque de verre sur la pulpe, dans des conditions contrôlées, tandis que le doigt restait immobile. En activant ou en désactivant des vibrations ultrasoniques dans le verre, ils pouvaient alterner entre une surface à haute friction (adhérente) et une surface à basse friction (glissante) sans changer d’autre paramètre.
Observer les forces et le glissement de la peau
Pendant ces contacts pilotés par le robot, les scientifiques ont mesuré les forces au niveau de la pulpe et filmé la peau à travers le verre transparent avec une caméra à grande vitesse. Cela leur a permis de suivre les minuscules mouvements des crêtes papillaires et de voir quelles zones de peau adhéraient au verre et lesquelles glissaient. Ils ont constaté que la force dirigée perpendiculairement au doigt (force normale) se développait à peu près de la même manière, que la surface soit adhérente ou glissante. En revanche, la force tangentielle le long de la surface, liée à la charge qu’un objet peut supporter avant de glisser, augmentait plus lentement et atteignait un pic plus bas sur la surface glissante. En conséquence, le rapport entre la force normale et la force tangentielle était plus élevé sur le verre glissant, ce qui rappelle ce qui se produit lorsque les gens resserrent activement leur prise sur un objet lisse.
Le glissement partiel comme acteur discret
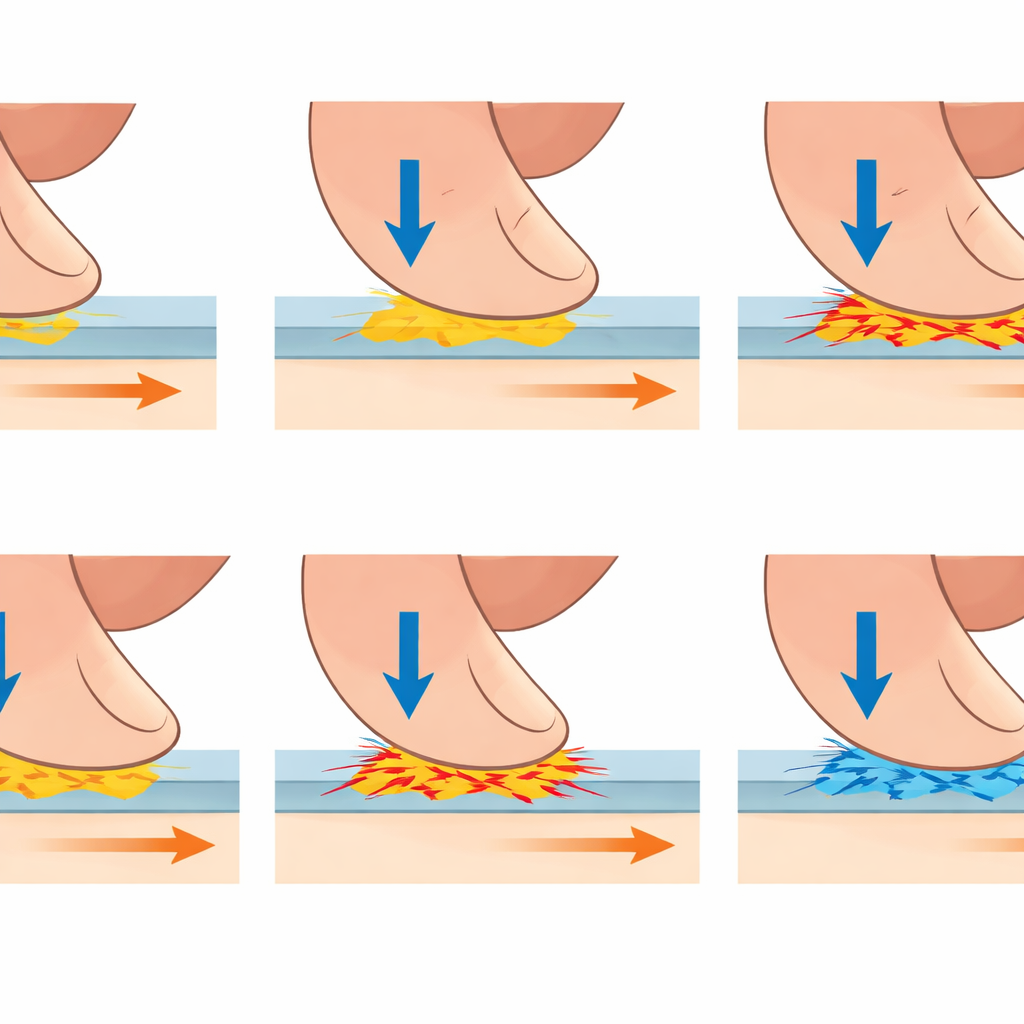
Les vidéos ont révélé que la peau ne se comporte jamais comme un bloc rigide collé à la surface. Dès le début du contact, des parties de la zone de contact glissent tandis que d’autres restent collées, et ce schéma évolue au fil du toucher. Sur le verre adhérent comme sur le verre glissant, la zone glissée diminuait initialement à mesure que l’augmentation de la force d’enfoncement faisait adhérer davantage de peau, puis augmentait à nouveau lorsque le mouvement tangent se développait. Cependant, sur la surface à faible friction, une plus grande portion de la zone de contact glissait et la distance totale parcourue par les parcelles de peau était plus importante. Ces glissements plus marqués étaient étroitement liés à la montée plus faible et plus lente de la force tangentielle : quand les parcelles de peau se détachaient et glissaient, elles relâchaient la contrainte de cisaillement, empêchant la force tangentielle d’augmenter aussi rapidement.
Le timing et la forme du mouvement façonnent la prise précoce
Parce que le robot a rejoué de nombreux motifs de mouvement naturels différents, l’étude a aussi pu tester comment le calendrier relatif de l’enfoncement et du glissement affectait ce qui se passait au niveau de la peau. Quand le mouvement tangent commençait plus tard — après que la plaque eut déjà davantage pénétré la pulpe — la surface de contact était plus grande et l’adhérence plus prononcée, ce qui réduisait le glissement. Dans les conditions glissantes, cette synchronisation avait un impact particulièrement fort : de petits changements dans le moment d’apparition du glissement pouvaient modifier sensiblement la proportion de peau glissant et le retard observé de la force tangentielle. Toutes choses confondues, une plus grande zone glissée et des distances de glissement plus longues allaient de pair avec des retards plus importants et des valeurs plus faibles de la force tangentielle.
Ce que cela signifie pour la préhension quotidienne
Pris ensemble, les résultats montrent que la mécanique souple des pulpes digitales contribue à façonner les forces de préhension avant même que le cerveau puisse intervenir. Sur les surfaces glissantes, un glissement partiel plus important limite naturellement la vitesse de montée des forces tangentielles, biaisant effectivement l’équilibre des forces vers l’enfoncement plutôt que le glissement. Ce comportement intrinsèque peut aider à stabiliser notre prise dans les premières dizaines de millisecondes du contact, gagnant du temps pour que des corrections plus lentes, pilotées par les nerfs, prennent le relais. Comprendre ces effets induits par la peau pourrait orienter la conception de mains prothétiques, d’écrans haptiques et de pinces robotiques qui, comme nos propres bouts de doigts, s’appuient autant sur la physique que sur le retour sensoriel pour maintenir leur prise sur le monde.
Citation: Devecioğlu, İ., Ruhi, R., Afzal, N. et al. The role of skin mechanics in contact force variation under different friction conditions. Sci Rep 16, 11481 (2026). https://doi.org/10.1038/s41598-026-41781-z
Mots-clés: contrôle de la préhension, friction de la pulpe digitale, mécanique de la peau, perception tactile, manipulation d’objets