Clear Sky Science · sv
Effektiv industriell anomaliupptäckt i punktmoln via rumslig kontextaggregering och selektiv generering av avvikande egenskaper
Varför små fel i 3D verkligen spelar roll
Från jetmotorblad till mobiltelefonskal måste moderna produkter ofta ha ytor som är nästan felfria. En hårfin spricka eller en knappt synlig buckla kan utvecklas till ett allvarligt fel, men fabriker har fortfarande svårt att snabbt och tillförlitligt upptäcka sådana brister, särskilt på komplexa 3D‑former. Denna artikel presenterar ett snabbt, automatiserat sätt att skanna tredimensionella objekt som "punktmoln" och markera misstänkta områden i realtid, med målet att göra högprecisions kvalitetskontroll både säkrare och mer effektiv.
Från plana bilder till full 3D‑form
De flesta befintliga inspektionssystem förlitar sig på vanliga fotografier eller 2D‑bilder. Dessa tillvägagångssätt har förbättrats avsevärt, men de komprimerar fortfarande verkligheten till en platt yta. När ett fel sitter på en kurvad kant, i en skugga eller endast ändrar ytans djup kan en 2D‑vy missa det. Ett 3D‑punktmoln registrerar däremot objektets fulla form som tusentals till miljontals små prickar i rymden. Denna rikare beskrivning gör det möjligt att upptäcka utbuktningar, fördjupningar, repor och saknat material som kan vara osynliga på ett fotografi. Att arbeta direkt med 3D‑data är dock utmanande: former kan vara invecklade, sensorer introducerar brus och luckor, och verkliga exempel på defekter är sällsynta, vilket gör det svårt för standardmetoder inom maskininlärning att lära sig vad som räknas som "avvikande."
En effektiv fyrstegsinspektionspipeline
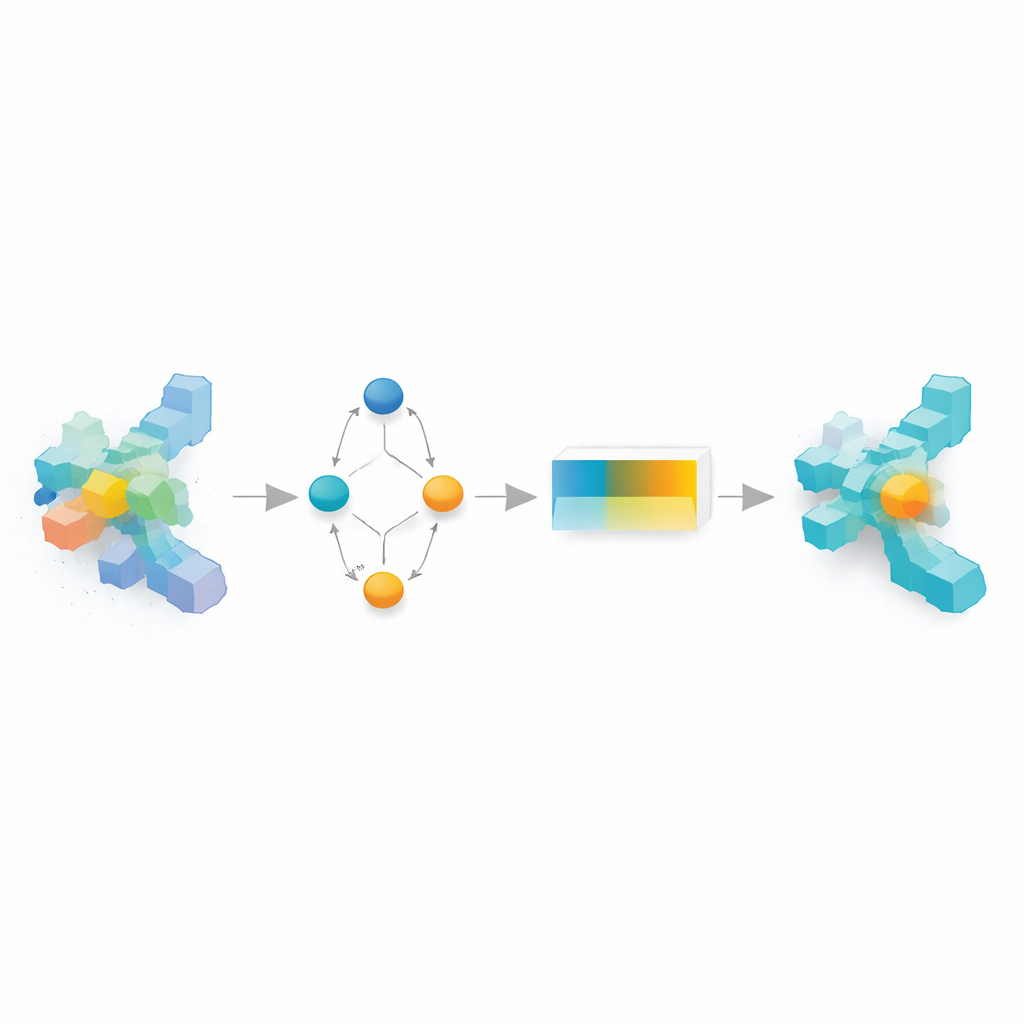
Författarna föreslår en kompakt pipeline som behandlar 3D‑inspektion som ett enda, snabbt steg från rådata till en "anomalikarta" som visar var problem kan finnas. Först skär systemet punktmolnet i många små överlappande patchar, där varje patch summeras till en numerisk token med hjälp av en kraftfull men frusen 3D‑formencoder som tidigare tränats på ett stort bibliotek av generiska modeller. Därefter sker rumslig kontextaggregering: varje lokal patch relateras till ett litet urval representativa prototyper som fångar objektets övergripande struktur. Genom att noggrant matcha patcher till prototyper utifrån både position och lokal geometri kan metoden avgöra om en utbuktning är en ofarlig kurva eller en misstänkt felaktig bula. Ett lättviktigt adapternätverk omformar sedan varsamt dessa egenskaper så att de bättre matchar särdragen i industriella skanningar, såsom sensorbrus och reflektion, utan den stora kostnaden att reträna hela encodern.
Att lära systemet vad "fel" ser ut som
Verkliga fabriker har sällan stora, välannoterade samlingar av defekta delar, vilket gör övervakad träning opraktisk. För att överkomma detta hittar metoden på egna "fejkdefekter" direkt i egenskapsrymden. Under träningen väljs slumpmässigt en delmängd av patch‑token och förvrängs subtilt med brus, medan resten lämnas oförändrade. Dessa korrupta patcher fungerar som svåra negativa exempel: de ligger tillräckligt nära det normala för att vara utmanande, men skiljer sig tillräckligt för att likna potentiella fel. Ett litet, uppmärksamhetsbaserat nätverk lär sig sedan att skilja rena från korrupta patcher samtidigt som det tar hänsyn till hur varje patch passar in i den större formen. När träningen är klar stängs brusgeneratorn av, och nätverket producerar en anomalipoäng för varje region i ett nytt punktmoln i ett enda framåtriktat steg, vilket sedan kan projiceras tillbaka på ytan som en färgkodad defektkarta.
Sätta metoden på prov
För att utvärdera hur väl denna design fungerar i praktiken testade forskarna den på två krävande dataset. Real3D‑AD innehåller ultradetajlade skanningar av tolv objektklasser, med noggrant märkta utbuktningar och fördjupningar, medan det nyintroducerade Industrial3D‑AD speglar röriga verkliga förhållanden: sensorbrus, partiella vyer, blanka material och subtila skador som fina repor och små gropar. I båda dataset överträffade den nya metoden konsekvent en rad toppmoderna 3D‑anomaliupptäckare, inte bara i förmågan att exakt lokalisera dåliga områden utan också i att balansera missade defekter mot falska larm. Avgörande var att den gjorde detta samtidigt som den körde i mer än 13 bildrutor per sekund på ett modernt grafikkort, vilket gör kontinuerlig inline‑inspektion möjlig.
Vad detta betyder för vardagliga produkter
Enkelt uttryckt visar studien att smartare användning av 3D‑forminformation kan göra automatiska kvalitetskontroller både skarpare och snabbare. Genom att koppla varje lokal ytpåverkan till helheten, anpassa generisk formkunskap till industriella förhållanden och fabricera realistiska "övningsdefekter", kan metoden pålitligt framhäva misstänkta ytområden utan att behöva stora defektdatabaser eller tung beräkning. För tillverkare kan detta innebära tidigare upptäckt av små fel, färre återkallelser och att säkrare, mer tillförlitliga produkter når konsumenterna.
Citering: Hoang, DC., Tan, P.X., Nguyen, AN. et al. Efficient industrial point cloud anomaly detection via spatial context aggregation and selective anomalous feature generation. Sci Rep 16, 10309 (2026). https://doi.org/10.1038/s41598-026-41255-2
Nyckelord: 3D anomaliupptäckt, industriell inspektion, punktmolnsdefekter, ytkvalitetskontroll, automatisk visuell inspektion