Clear Sky Science · es
Detección eficiente de anomalías en nubes de puntos industriales mediante agregación de contexto espacial y generación selectiva de características anómalas
Por qué los pequeños defectos en 3D importan de verdad
Desde las palas de turbinas hasta las carcasas de los smartphones, los productos modernos contienen piezas cuyas superficies deben ser casi perfectas. Una microgrieta o una abolladura apenas visible puede convertirse en una falla grave, y sin embargo las fábricas siguen teniendo dificultades para detectar esos defectos de forma rápida y fiable, especialmente en geometrías 3D complejas. Este artículo presenta una forma rápida y automatizada de escanear objetos tridimensionales como “nubes de puntos” y marcar en tiempo real las zonas sospechosas, con el objetivo de hacer el control de calidad de alta precisión más seguro y eficiente.
De imágenes planas a la forma 3D completa
La mayoría de los sistemas de inspección existentes se basan en fotografías o imágenes 2D. Estos enfoques han mejorado mucho, pero siguen comprimiendo el mundo real en una superficie plana. Cuando un defecto está en un borde curvo, en una sombra o solo altera la profundidad de la superficie, una vista 2D puede pasar por alto el problema. En contraste, una nube de puntos 3D registra la forma completa de un objeto como miles o millones de pequeños puntos en el espacio. Esta descripción más rica permite detectar protuberancias, huecos, arañazos y material ausente que podrían ser invisibles en una fotografía. Sin embargo, trabajar directamente con datos 3D es desafiante: las formas pueden ser intrincadas, los sensores introducen ruido y huecos, y los ejemplos de defectos reales son escasos, lo que dificulta que los métodos estándar de aprendizaje automático aprendan qué se considera “anómalo”.
Un pipeline de inspección optimizado en cuatro pasos
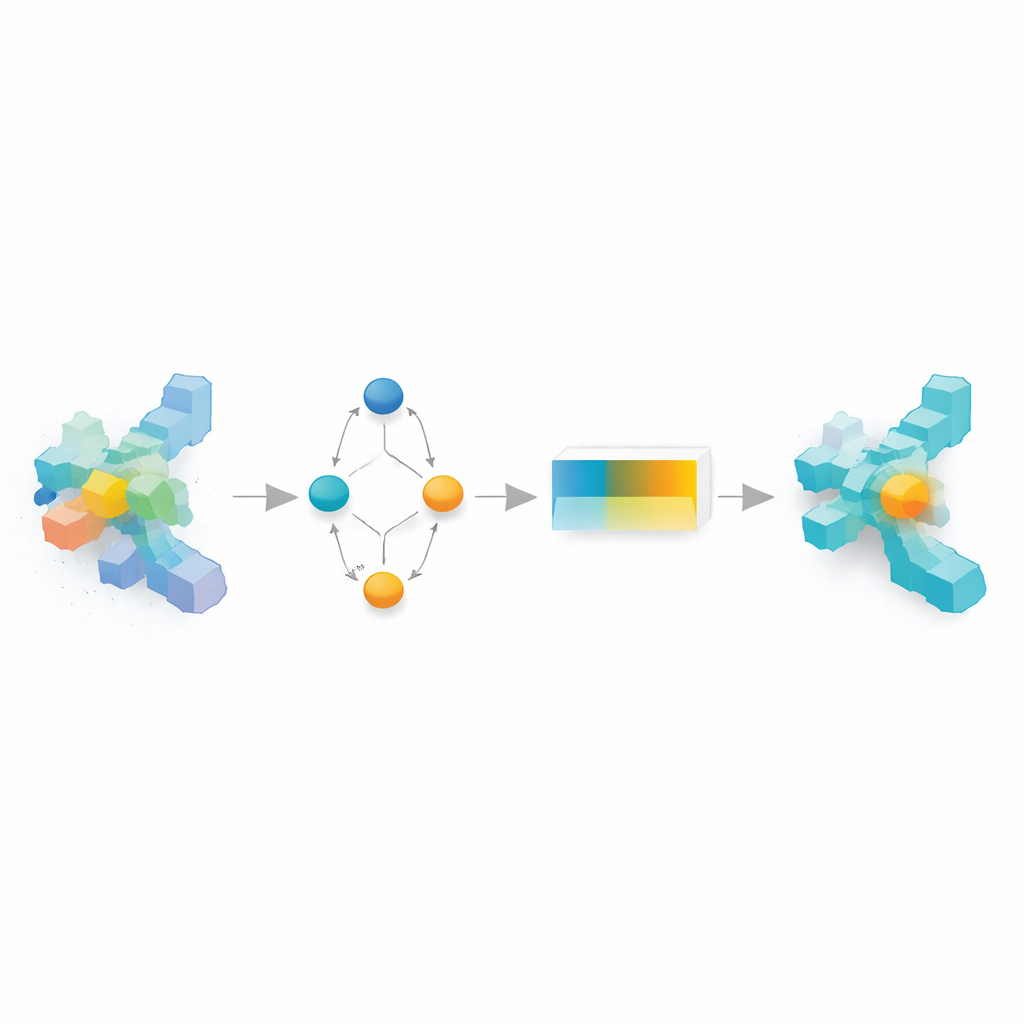
Los autores proponen un pipeline compacto que trata la inspección 3D como una única pasada rápida desde los datos crudos hasta un “mapa de anomalías” que muestra dónde puede haber problemas. Primero, el sistema corta la nube de puntos en muchos parches pequeños y solapados, cada uno resumido por un token numérico usando un potente pero congelado codificador de formas 3D entrenado previamente con una gran biblioteca de modelos genéricos. A continuación viene la agregación de contexto espacial: cada parche local se relaciona con un pequeño conjunto de prototipos representativos que capturan la estructura general del objeto. Al emparejar cuidadosamente parches con prototipos según la posición y la geometría local, el método puede distinguir si una protuberancia es una curva inofensiva o un abultamiento fuera de lugar. Una red adaptadora ligera reconfigura suavemente estas características para que se ajusten mejor a las peculiaridades de los escaneos industriales, como el ruido del sensor y la reflectividad, sin el coste elevado de volver a entrenar todo el codificador.
Enseñar al sistema cómo es lo “incorrecto”
En las fábricas reales rara vez existen grandes colecciones bien etiquetadas de piezas defectuosas, lo que hace impráctico el entrenamiento supervisado. Para superar esto, el método inventa sus propios “defectos falsos” directamente en el espacio de características. Durante el entrenamiento, selecciona aleatoriamente un subconjunto de tokens de parches y los perturba sutilmente con ruido, dejando el resto sin cambios. Estos parches corrompidos actúan como ejemplos negativos difíciles: están lo bastante cerca de lo normal como para ser desafiantes, pero lo bastante distintos como para asemejarse a posibles fallos. Una pequeña red basada en atención aprende entonces a distinguir parches limpios de los corrompidos teniendo en cuenta cómo encaja cada parche en la forma global. Cuando finaliza el entrenamiento, el generador de ruido se desactiva y la red produce una puntuación de anomalía para cada región de cualquier nueva nube de puntos en una sola pasada hacia adelante, que luego puede proyectarse de nuevo sobre la superficie como un mapa de defectos codificado por color.
Poniendo el enfoque a prueba
Para comprobar el rendimiento de este diseño en la práctica, los investigadores lo evaluaron en dos conjuntos de datos exigentes. Real3D-AD contiene escaneos ultradetallados de doce clases de objetos, con protuberancias y hundimientos cuidadosamente etiquetados, mientras que el recientemente introducido Industrial3D-AD refleja condiciones reales desordenadas: ruido de sensor, vistas parciales, materiales brillantes y daños sutiles como arañazos finos y pequeños hoyos. En ambos conjuntos de datos, el nuevo método superó constantemente a una variedad de detectores de anomalías 3D de última generación, no solo en la capacidad de localizar las zonas dañadas sino también en equilibrar defectos perdidos frente a alarmas falsas. Lo crucial es que lo hizo funcionando a más de 13 fotogramas por segundo en una sola tarjeta gráfica moderna, haciendo viable la inspección continua en línea.
Qué significa esto para los productos cotidianos
En términos sencillos, el estudio muestra que un uso más inteligente de la información de la forma 3D puede hacer que las comprobaciones automáticas de calidad sean más precisas y rápidas. Al vincular cada parche local de superficie con el panorama general, adaptar el conocimiento genérico de formas a las condiciones industriales y fabricar “defectos de práctica” realistas, el método puede resaltar de forma fiable las regiones superficiales sospechosas sin necesitar grandes bases de datos de defectos ni un cómputo intensivo. Para los fabricantes, esto podría traducirse en una detección más temprana de pequeños fallos, menos retiradas del mercado y productos más seguros y fiables para los consumidores.
Cita: Hoang, DC., Tan, P.X., Nguyen, AN. et al. Efficient industrial point cloud anomaly detection via spatial context aggregation and selective anomalous feature generation. Sci Rep 16, 10309 (2026). https://doi.org/10.1038/s41598-026-41255-2
Palabras clave: Detección de anomalías 3D, inspección industrial, defectos en nubes de puntos, control de calidad superficial, inspección visual automatizada