Clear Sky Science · ru
Эффективное обнаружение аномалий в промышленной облачной 3D‑модели через агрегирование пространственного контекста и селективную генерацию аномальных признаков
Почему мелкие дефекты в 3D действительно важны
От лопаток двигателей до корпусов смартфонов — современные изделия содержат детали, поверхности которых должны быть почти идеальными. Едва заметная трещина или маленькая вмятина могут перерасти в серьёзную поломку, однако заводы по‑прежнему испытывают трудности с быстрым и надёжным обнаружением таких дефектов, особенно на сложных 3D‑формах. В этой работе предлагается быстрый автоматизированный способ сканирования трёхмерных объектов в виде «облаков точек» и пометки подозрительных областей в реальном времени, что призвано сделать высокоточный контроль качества и безопаснее, и эффективнее.
От плоских изображений к полноценной 3D‑форме
Большинство существующих систем инспекции опираются на обычные фотографии или 2D‑изображения. Эти подходы значительно улучшились, но они по сути сжимают реальный мир на плоскую поверхность. Когда дефект находится на изогнутом крае, в тени или проявляется только в виде изменения глубины поверхности, 2D‑вид может его не заметить. В отличие от этого, 3D‑облако точек фиксирует полную форму объекта в виде тысяч или миллионов крошечных точек в пространстве. Такое более полное представление позволяет выявлять выпуклости, воронки, царапины и недостающий материал, которые могут быть невидимы на фотографии. Однако работа напрямую с 3D‑данными сложна: формы могут быть запутанными, датчики вносят шум и пропуски, а реальные примеры дефектов редки, что затрудняет обучение стандартных методов машинного обучения тому, что считать «ненормальным».
Упрощённый четырёхэтапный конвейер инспекции
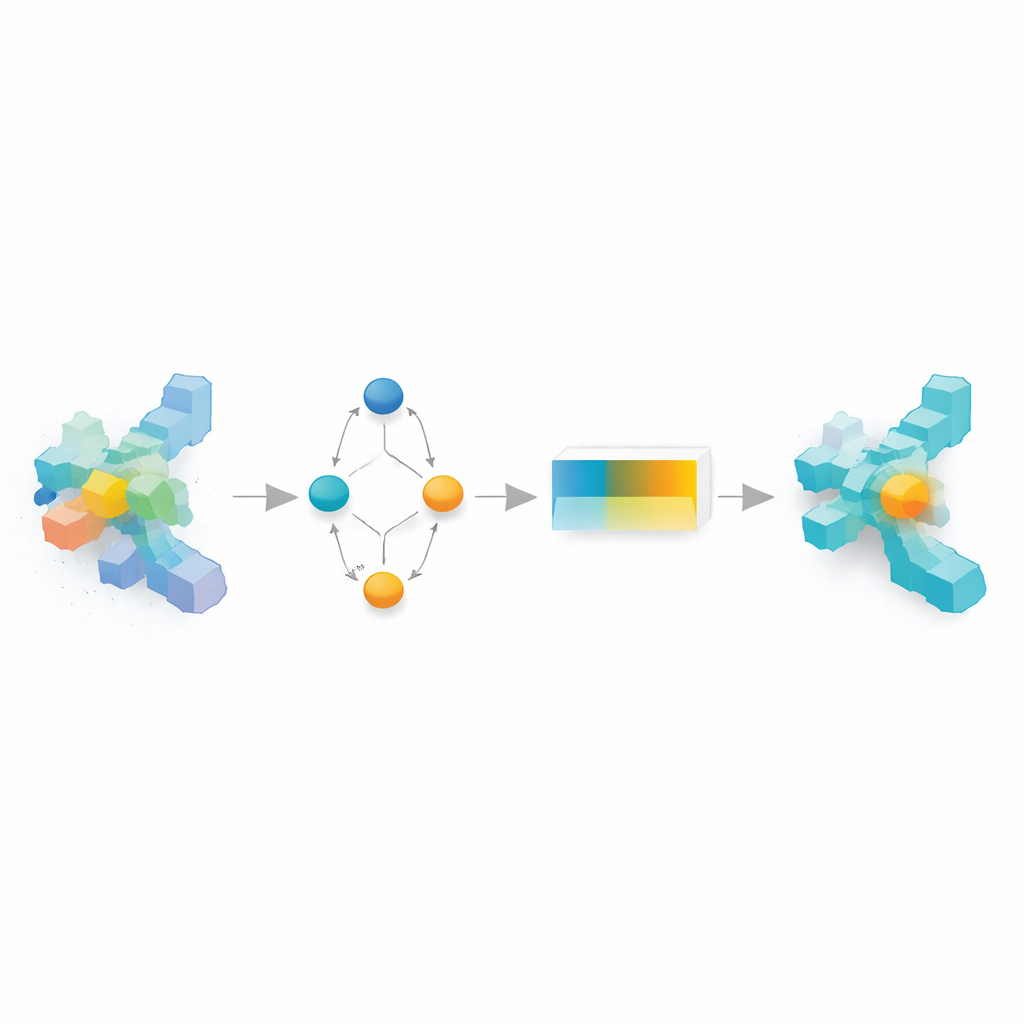
Авторы предлагают компактный конвейер, рассматривающий 3D‑инспекцию как единый быстрый проход от сырых данных к «карте аномалий», показывающей, где может таиться проблема. Сначала система разбивает облако точек на множество небольших перекрывающихся патчей, каждый из которых сводится к числовому токену с помощью мощного, но зафиксированного 3D‑кодировщика формы, предварительно обученного на большой библиотеке общих моделей. Затем идёт агрегирование пространственного контекста: каждый локальный патч сопоставляется с небольшим набором репрезентативных прототипов, отражающих общую структуру объекта. Тщательное сопоставление патчей с прототипами с учётом положения и локальной геометрии позволяет отличать безобидный изгиб от подозрительной выпуклости. Лёгкая адаптер‑сеть затем мягко подстраивает эти признаки под особенности промышленных сканов, такие как шум сенсора и отражательная способность, без больших затрат на дообучение всего кодировщика.
Обучая систему тому, как выглядит «неправильно»
В реальных цехах редко есть большие хорошо размеченные собрания дефектных деталей, поэтому обучение с учителем мало применимо. Чтобы обойти это, метод «придумывает» собственные фальшивые дефекты прямо в пространстве признаков. Во время обучения случайно выбирается подмножество токенов патчей и аккуратно искажается шумом, оставляя остальные без изменений. Эти повреждённые патчи выступают в роли сложных негативных примеров: они достаточно близки к норме, чтобы быть проблемными, но достаточно отличаются, чтобы напоминать возможные дефекты. Небольшая сеть на основе механизма внимания затем учится различать чистые и искажённые патчи, учитывая, как каждый патч вписывается в общую форму. После завершения обучения генератор шума отключается, и сеть за один проход выдаёт оценку аномалии для каждой области нового облака точек, которую можно затем проецировать обратно на поверхность в виде цветовой карты дефектов.
Тестирование подхода
Чтобы оценить эффективность дизайна на практике, исследователи протестировали его на двух сложных наборах данных. Real3D-AD содержит сверхдетальные сканы двенадцати классов объектов с тщательно размеченными выпуклостями и вогнутостями, тогда как недавно представленный Industrial3D-AD отражает грязные реальные условия: шум сенсора, частичные обзоры, блестящие материалы и тонкие повреждения вроде мелких царапин и крошечных ямок. На обоих наборах данных новый метод последовательно превосходил ряд современных 3D‑детекторов аномалий — не только в умении точно локализовать проблемные области, но и в балансе между пропущенными дефектами и ложными срабатываниями. И что важно, он делал это, работая со скоростью более 13 кадров в секунду на одной современной графической карте, что делает возможной непрерывную встроенную инспекцию.
Что это значит для повседневных продуктов
Проще говоря, исследование показывает, что более разумное использование 3D‑информации о форме может сделать автоматические проверки качества и точнее, и быстрее. Связывая каждый локальный участок поверхности с общей картиной, адаптируя общее знание о формах к промышленным условиям и моделируя реалистичные «учебные дефекты», метод способен надёжно выделять подозрительные участки поверхности без необходимости больших баз дефектов или тяжёлых вычислений. Для производителей это может означать более раннее обнаружение мелких дефектов, меньшее число отзывов и более безопасные, надёжные продукты для потребителей.
Цитирование: Hoang, DC., Tan, P.X., Nguyen, AN. et al. Efficient industrial point cloud anomaly detection via spatial context aggregation and selective anomalous feature generation. Sci Rep 16, 10309 (2026). https://doi.org/10.1038/s41598-026-41255-2
Ключевые слова: Обнаружение аномалий в 3D, промышленный контроль, дефекты облаков точек, контроль качества поверхности, автоматизированный визуальный контроль